Pojęcie stanu układu dynamicznego - wykład
- Politechnika Warszawska
- Podstawy automatyki
Pobrań: 28
Wyświetleń: 420
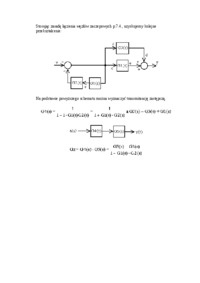
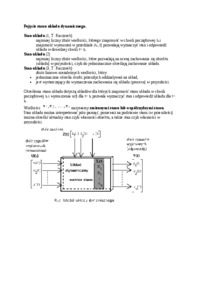
Pojęcie stanu układu dynamicznego. Stan układu (1, T. Kaczorek) najmniej liczny zbiór wielkości, którego znajomość w chwili początkowej t0 i znajomość wymuszeń w przedziale (t0 ,t] pozwalają...