Wykład - kryteria jakości regulacji ciągłej
- Politechnika Warszawska
- Podstawy automatyki
Pobrań: 14
Wyświetleń: 924
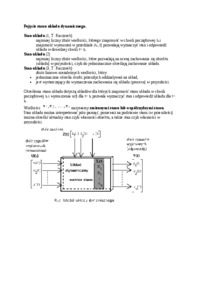
Podać i wyjaśnić kryteria jakości regulacji ciągłej. Wskaźnik dotyczącej cech odpowiedzi skokowej: czas regulacji tr - jest czasem od chwili , gdy uchyb przejściowy zmaleje poniżej ustalonej wartości np.:5% współ przeregulowania χ -stosunek ...