To tylko jedna z 11 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę

Zagadnienia zawarte w notatce: typy regulatorów, przebieg charakterystyk w odpowiedzi na wymuszenie skokowe oraz liniowe dla poszczególnych kombinacji regulatora PID, dobór nastaw w regulatorze jednoobwodowym, doświadczalna metoda doboru nastaw regulatorów o działaniu ciągłym tzw. reguła Ziglera-Nicholsa, badanie charakterystyk dynamicznych pneumatycznego i elektronicznego regulatora P I D.
Regulator P I D
W układach regulacji automatycznej regulator zastąpił operatora, który w układzie
sterowania ręcznego kontrolował przebieg procesu regulowanego. Poprawne działanie układu
regulacji zależy od doboru odpowiedniego typu regulatora do obiektu regulacji. Przyjęty typ
regulatora określa zasadę regulacji, tzn. zależność wiążącą sygnał odchyłki e z sygnałem
sterującym u. W regulatorach ciągłych ta zależność opiera się na proporcjonalności,
całkowaniu i różniczkowaniu odchyłki e.
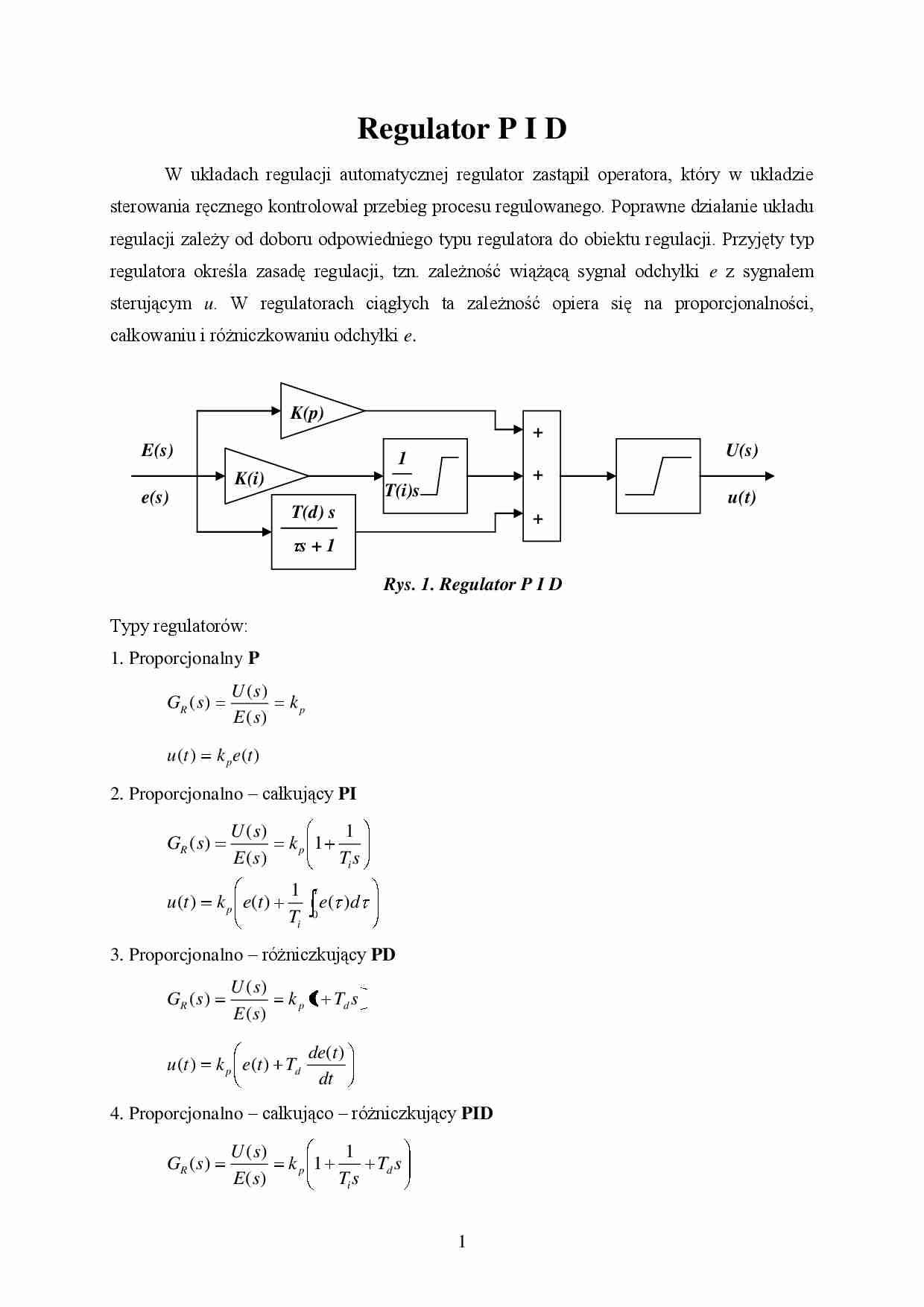
K(p)
+
E(s) U(s)
1 +
K(i) e(s) T(i)s
u(t) T(d) s
+
s + 1
Rys. 1. Regulator P I D
Typy regulatorów:
1. Proporcjonalny P U (s)
G (s)k RpE(s)
u(t)k e(t) p
2. Proporcjonalno – całkujący PI U (s)
1
G (s)k 1
RE(sp
)T sit
1
u t
( )ke t
( )e( )d
pT 0i
3. Proporcjonalno – różniczkujący PD U (s)
G (s)k 1 T s RE(spd
)de t
( )
u t
( )ke t
( ) T
pddt
4. Proporcjonalno – całkująco – różniczkujący PID U (s)
1
G (s)k 1T s RE(sp
)T sdi
1 t
1de t
( )
u t
( )ke t
( )e( )dT
pTd
0dti
Oznaczenie typów regulatorów pochodzi od pierwszych liter angielskich nazw
poszczególnych operacji realizowanych na nim (P – proportional, I – integration, D – differentiation). Istnieją również inne kombinacje regulatorów jednak nie są one
wykorzystywane w aplikacjach sterujących. Wartość sterowania wypracowana przez
regulator PID zależy proporcjonalnie od:
- uchybu,
- uchybu scałkowanego (zsumowanego),
- pochodnej (szybkości zmiany) uchybu.
O wpływie każdej z trzech wartości decydują parametry regulatora (nastawy występujące
w powyższych równaniach jako współczynniki):
kp – współczynnik wzmocnienia,
Ti – czas zdwojenia,
Td – czas wyprzedzenia.
Zamiast wzmocnienia proporcjalnego kp podaje się często tzw. zakres proporcjonalności Xp, w procentach:
1X
10 %
0
(6) pk p
Zakres proporcjonalności można rozumieć jako procentową część pełnego zakresu zmian
wielkości wejściowej e, potrzebna do wywołania zmiany wielkości wyjściowej x o pełen
zakres.
Czas zdwojenia T określa intensywność działania całkującego regulatora. Nazwa i
„czas zdwojenia” znajduje uzasadnienie na wykresie charakterystyki skokowej regulatora PI
(rys. 2), po upływie czasu t równym Ti składowa działania całkującego regulatora jest równa
składowej działania proporcjonalnego, zatem całkowita wartość sygnału wyjściowego
(…)
… jest odpowiedzią układu automatycznej regulacji (UAR) na
skokową zmianę wymuszenia, inaczej mówiąc, jest to przebieg zmian wielkości
regulowanej y(t) w czasie, wywołany skokową zmianą zakłócenia (lub wartości zadanej).
3
UAR można przedstawić w postaci pokazanej na rys. 3. Założono tutaj, iż zakłócenia
działają na UAR w tym samym torze, co wielkość sterująca u(t) i są przetwarzane
w obiekcie w sposób opisany…
… żądaną dokładność statyczną tzn. uchyb ustalony
będzie zawierał się w dopuszczalnych granicach błędu regulacji.
Regulator PI - eliminuje w układzie uchyb ustalony i zapewnia dobrą regulację
tylko przy zakłóceniach o niskich częstotliwościach.
Regulator PD - nie usuwa uchybu ustalonego i zapewnia szersze pasmo regulacji
niż PI, bardzo szybko reaguje na występujący uchyb lecz ma gorszą jakość…
… wartości sygnału wyjściowego, wartość
dolna zakresu, zmniejszenie wartości parametru konfiguracyjnego,
SET + ▲ skokowa (krańcowa) zmiana wartości sygnału wyjściowego, wartość
górna zakresu, zwiększenie wartości parametru konfiguracyjnego,
SET przy czasie podtrzymania większym od 4 sek. wejście w tryb
wprowadzania hasła,
▲ + ▼ szybki powrót do wartości zadanej (tryb domyślny).
Zadania do wykonania
1…
…
układzie regulacji. Schemat stanowiska pomiarowego przedstawiono na rys. 4 natomiast
panel sterujący zamieszczono na rys. 5. Reduktory R1 i R2, oraz współpracujące z nimi
manometry M1, M2, przełącznik pneumatyczny P, tworzą układ do symulacji wielkości
mierzonej (w rzeczywistym układzie regulacji jest to sygnał z przetwornika pomiarowego).
Przełącznik P umożliwia skokową zmianę wielkości mierzonej Y = P2…
... zobacz całą notatkę
Komentarze użytkowników (0)