To tylko jedna z 3 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę


2.5. Moment wektora względem osi
Zajmiemy się obecnie zdefiniowaniem wielkości będącej miarą działania
obrotowego wektora względem osi. Wielkość tę nazywamy momentem wektora
względem osi. W tym celu przyjmiemy, że dany jest dowolny wektor a oraz oś l,
której kierunek jest określony przez wektor jednostkowy el (rys. 2.12).
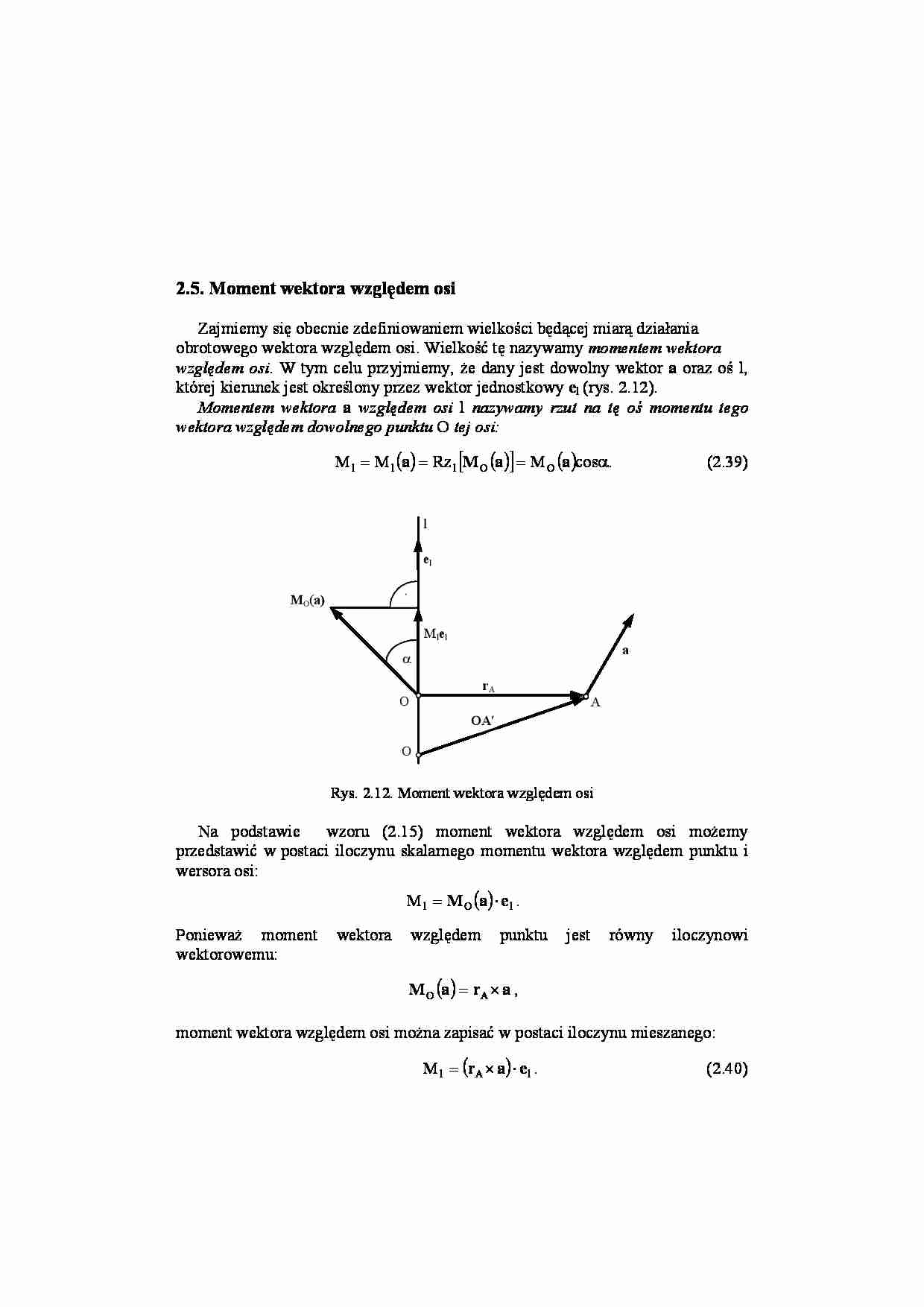
Momentem wektora a względem osi l nazywamy rzut na tę oś momentu tego
wektora względem dowolnego punktu O tej osi:
M l = M l (a ) = Rz l [M O (a )] = M O (a )cosα.
(2.39)
l
el
⋅
MO(a)
Mlel
a
α
rA
O
A
OA′
O
Rys. 2.12. Moment wektora względem osi
Na podstawie
wzoru (2.15) moment wektora względem osi możemy
przedstawić w postaci iloczynu skalarnego momentu wektora względem punktu i
wersora osi:
M l = M O (a ) ⋅ e l .
Ponieważ moment
wektorowemu:
wektora
względem
punktu
jest
równy
iloczynowi
M O (a ) = rA × a ,
moment wektora względem osi można zapisać w postaci iloczynu mieszanego:
M l = (rA × a ) ⋅ e l .
(2.40)
Tak zdefiniowany moment wektora względem osi jest skalarem. Definicja ta
jest wystarczająca, ponieważ wektor M l (a )e l jest skierowany wzdłuż osi l, przeto
do jego opisu wystarczy podanie tylko jego wartości.
Aby podana na wstępie definicja momentu względem osi była jednoznaczna,
należy wykazać, że rzut na oś l momentu wektora a względem punktu O leżącego
na tej osi nie zależy od położenia punktu O na tej osi. W tym celu obliczymy
moment wektora a względem innego punktu O ′ leżącego na osi l (rys. 2.12) i
dokonamy jego rzutu na tę oś:
[
]
Rz l M O′ (a ) = M O′ (a ) ⋅ e l .
(a)
Na podstawie rys. 2.12 wektor O ′A możemy przedstawić jako sumę wektora
O ′O i rA :
O ′A = O ′O + rA .
Po podstawieniu tej zależności do wzoru (a) oraz skorzystaniu z własności
iloczynu mieszanego otrzymamy:
[
]
Rz l [M O′ (a )] = ( O ′O + rA ) × a ⋅ e l = ( O ′O × a + rA × a ) ⋅ e l =
= (O ′O × a ) ⋅ e l + ( rA × a ) ⋅ e l = ( e l × O ′O) ⋅ a + ( rA × a ) ⋅ e l .
Ponieważ wektory e l i O ′O są równoległe, ich iloczyn wektorowy jest równy
zeru: e l × O ′O = 0 , ostatecznie otrzymujemy:
Rz l [M O′ (a )] = ( rA × a ) ⋅ e l = Rz l [M O (a )],
czyli rzut na oś momentu wektora względem punktu na osi nie zależy od położenia
punktu na osi.
Z definicji momentu względem osi wynika, że będzie on równy zeru, jeżeli
moment MO(a) będzie równy zeru lub jego rzut na oś będzie równy zeru. Będzie
tak, gdy kierunek wektora a będzie przecinał oś l lub będzie do niej równoległy.
Z określenia momentu wektora względem osi możemy zauważyć, że rzuty
momentu MO(a) wektora a względem początku układu współrzędnych
O (rys. 2.11) na osie prostokątnego układu współrzędnych są równocześnie
momentami tego wektora względem osi x, y, z. Na podstawie wzorów (2.38)
momenty wektora a względem osi x, y, z będą opisane równaniami:
M x = M Ox = ya z − za y ,⎫
⎪
M y = M Oy = za x − xa z ,⎬
M z = M Oz = xa y − ya x .⎪
⎭
(2.41)
W oparciu o powyższe wzory można podać drugi sposób obliczania momentu
wektora względem osi. Na przykład z pierwszego wzoru
... zobacz całą notatkę
Komentarze użytkowników (0)