To tylko jedna z 2 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę

DOBÓR NASTAW REGULATORÓW
Nastawami regulatora nazywa się współczynniki transmitancji operatorowej regulatora, tj. kp - współczynnik wzmocnienia, Ti - czas zdwojenia, Td - czas wyprzedzenia. Zadaniem inżyniera jest odpowiednie dobranie nastaw, tak aby układ regulacji spełniał stawiane przed nim wymagania. Najważniejszym wymaganiem jest stabilność układu. W uproszczeniu oznacza to, że jeżeli układ jest pobudzony stałym, niezerowym sygnałem, to odpowiedź układu dąży do stałej wartości. Istnieje szereg metod pozwalających sprawdzić stabilność. Jedna z nich opiera się na stwierdzeniu, że układ liniowy jest stabilny, jeżeli wszystkie pierwiastki wielomianu charakterystycznego układu mają ujemne części rzeczywiste. Wielomian charakterystyczny jest mianownikiem transmitancji operatorowej układu. Okazuje się, że dla pewnych połączeń obiektu i regulatora nie można znaleźć takich nastaw, które zapewniłyby stabilność. Mówi się wtedy o niestabilności strukturalnej. Np. połączenie obiektu całkującego z regulatorem I (patrz ćw. nr 5). W tym przypadku pierwiastki wielomianu charakterystycznego mają zerowe części rzeczywiste. W Tabeli 6.1 znajduje się zestawienie typów obiektów oraz typów regulatorów, z którymi można je łączyć. Istnieją dwa rodzaje układów - układ regulacji nadążnej i układ regulacji zakłóceniowej (stałowartościowej). Dla tych dwu układów formułuje się odmienne cele. W regulacji nadążnej sygnał wyjściowy z układu musi idealnie oddawać sygnał wartości zadanej. W regulacji zakłóceniowej sygnał wyjściowy z układu musi być niewrażliwy na zmiany zakłócenia. W idealnej sytuacji sygnał wyjściowy pozostanie stały i równy stałej wartości zadanej niezależnie od zmian zakłócenia. Niestety takiego ideału nigdy nie udaje się osiągnąć w praktyce. Jakość regulacji określa na ile dany przebieg różni się od idealnego. Do oceny jakości służy szereg kryteriów.
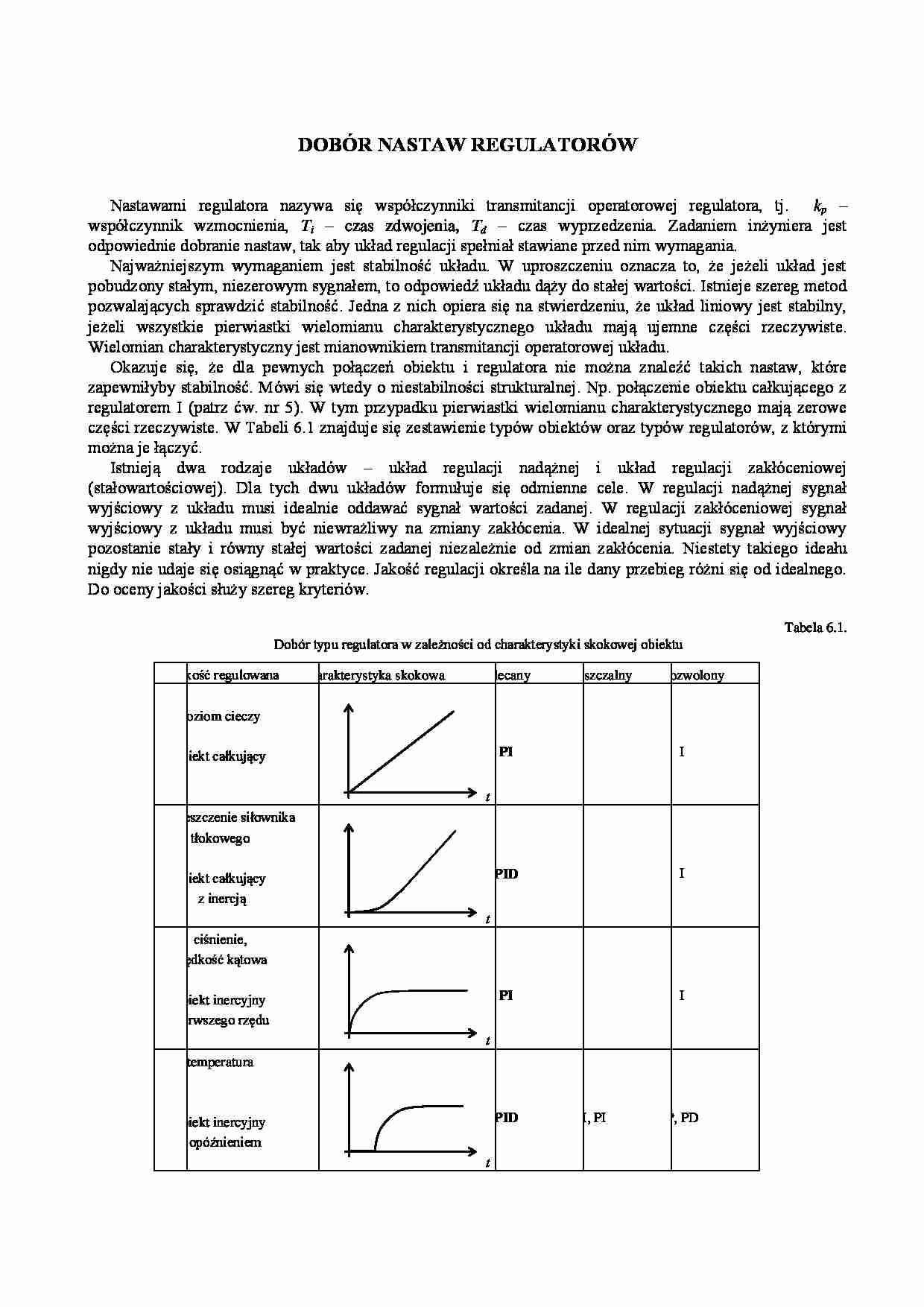
Tabela 6.1.
Dobór typu regulatora w zależności od charakterystyki skokowej obiektu
Lp.
wielkość regulowana
charakterystyka skokowa
zalecany
dopuszczalny
niedozwolony
1.
poziom cieczy
obiekt całkujący
y(t)
t
PI
I
2.
przemieszczenie siłownika tłokowego
obiekt całkujący
z inercją
y(t)
t
PID
I
3.
ciśnienie,
(…)
… z innymi przebiegami, najkrótszy czas regulacji tr, jaki może istnieć w danym UAR oraz nie ma przeregulowania. Kryterium I2 prowadzi do przebiegów o najmniejszych wartościach odchyłek dynamicznych edw danym układzie, przy dopuszczalnym przeregulowaniu. Za optymalne przebiegi uważa się te, w których występuje I2min. Przebiegi te mają stosunkowo duże przeregulowanie, sięgające 40-45 %.
Z przebiegów optymalnych, ze względu na kryteria I1 lub I2 wynika, że jednoczesne uzyskanie małych odchyłek dynamicznych i małego przeregulowania jest niemożliwe. Użyteczne okazało się kryterium całkowe I3, które daje przebiegi o wskaźnikach pośrednich w porównaniu z optymalnymi przebiegami ze względu na kryteria I1 i I2. W minimalizacji kryterium I3 występuje przeregulowanie nie większe niż 20% i czas regulacji zbliżony…
… wartości zadanej yz i sygnału wyjściowego z obiektu y w stanach ustalonych, czyli
(6.1)
1a) odchyłka statyczna względna podaje stosunek odchyłki statycznej es do odchyłki statycznej es obiektu jaka zaistniałaby w obiekcie bez regulatora przy tym samym wymuszeniu z(t)
(6.2)
Odchyłka statyczna względna odnosi się tylko do UAR z obiektami statycznymi (z wyrównaniem). Pozwala porównywać jakość regulacji…
… regulatora przy tym samym wymuszeniu z(t). (6.5)
Odchyłka dynamiczna względna odnosi się tylko do UAR z obiektami statycznymi ( z wyrównaniem). 3) czas regulacji tr - jest to czas jaki upływa od wystąpienia wymuszenia skokowego do chwili, gdy odchyłka regulacji osiągnie wartość ustaloną z tolerancją (wartość en przyjmuje się zależnie od wymagań technologicznych). Ponieważ granice tolerancji oparte…
… regulacji z regulatorem typu P. W przypadku występowania w UAR regulatora PI, regulator P uzyskuje się przez nastawienie maksymalnie długiego czasu zdwojenia ( ). Jeśli występuje regulator PID, to oprócz nastawienia maksymalnego czasu zdwojenia ( ), należy nastawić maksymalnie krótki czas wyprzedzenia (Td = 0). Następnie zwiększając współczynnik wzmocnienia kp należy doprowadzić układ regulacji do granicy…
... zobacz całą notatkę
Komentarze użytkowników (0)