To tylko jedna z 14 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę


Teoria maszyn i mechanizmów
Kinematyka mechanizmów. Metoda analityczna
1
ANALIZA KINEMATYCZNA MECHANIZMÓW PŁASKICH
METODA ANALITYCZNA
Analiza kinematyczna mechanizmów dźwigniowych metodą wieloboku
wektorowego
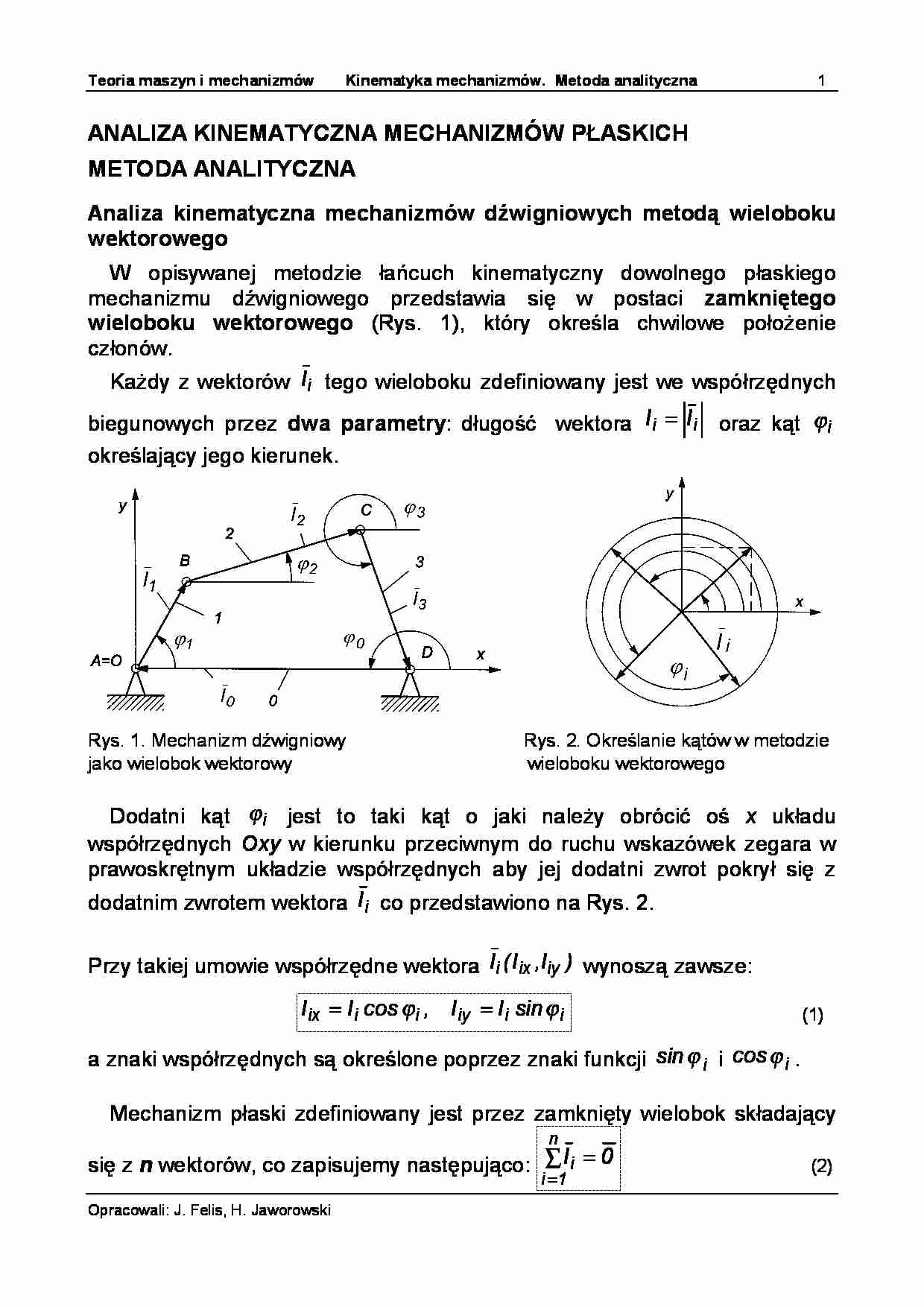
W opisywanej metodzie łańcuch kinematyczny dowolnego płaskiego
mechanizmu dźwigniowego przedstawia się w postaci zamkniętego
wieloboku wektorowego (Rys. 1), który określa chwilowe położenie
członów.
Każdy z wektorów Ii tego wieloboku zdefiniowany jest we współrzędnych
biegunowych przez dwa parametry: długość wektora Ii = Ii
określający jego kierunek.
Rys. 1. Mechanizm dźwigniowy
jako wielobok wektorowy
oraz kąt ϕ i
Rys. 2. Określanie kątów w metodzie
wieloboku wektorowego
Dodatni kąt ϕ i jest to taki kąt o jaki należy obrócić oś x układu
współrzędnych Oxy w kierunku przeciwnym do ruchu wskazówek zegara w
prawoskrętnym układzie współrzędnych aby jej dodatni zwrot pokrył się z
dodatnim zwrotem wektora I i co przedstawiono na Rys. 2.
Przy takiej umowie współrzędne wektora Ii ( Iix ,Iiy ) wynoszą zawsze:
Iix = Ii cos ϕ i , Iiy = Ii sin ϕ i
(1)
a znaki współrzędnych są określone poprzez znaki funkcji sin ϕ i i cos ϕ i .
Mechanizm płaski zdefiniowany jest przez zamknięty wielobok składający
n
się z n wektorów, co zapisujemy następująco: ∑ Ii = 0
i =1
Opracowali: J. Felis, H. Jaworowski
(2)
Teoria maszyn i mechanizmów
Kinematyka mechanizmów. Metoda analityczna
2
Wielobok wektorowy zbudowany na
członach mechanizmu
posiada
2⋅n parametrów.
n
∑ Ii = 0
i =1
(2)
Rys. 1. Mechanizm dźwigniowy jako wielobok wektorowy
Wielobok wektorowy opisany równaniem (2) po zrzutowaniu go na osie
płaskiego układu współrzędnych odpowiada dwóm równaniom skalarnym:
n
∑ l ix = 0 ,
i =1
n
∑ l iy = 0 ,
i =1
⇒
⇒
n
∑ l i cos ϕ i = 0
i =1
(3)
n
∑ l i sin ϕ i = 0
i =1
(4)
Ponieważ układ równań (3), (4) musi być oznaczony, na jego podstawie
można wyznaczyć dwa szukane parametry geometryczne np. dwie długości, długość i kąt lub dwa kąty. Pozostałe 2n - 2 parametry muszą być zatem
znane i należy je przyjąć jako dane w momencie definiowania mechanizmu.
Po zróżniczkowaniu równań (3), (4) względem czasu otrzymujemy układy
równań:
n
dl
∑ ix = 0 ,
i =1 dt
n
oraz
d 2 l ix
i =1
dt 2
∑
= 0,
n
∑
dl iy
i =1
dt
=0
n
d 2 l iy
i =1
dt 2
∑
=0
(5)
(6)
Z układu równań (5) wyznacza się dwie szukane prędkości liniowe lub kątowe
a na podstawie (6) dwa szukane przyspieszenia liniowe lub kątowe.
Opracowali: J. Felis, H. Jaworowski
Teoria maszyn i mechanizmów
Kinematyka mechanizmów. Metoda analityczna
3
Przy różniczkowaniu układu (5) względem czasu mogą zajść dwa przypadki:
a) długość danego członu jest stała l i = const , wtedy
dl ix
= 0,
dt
dl iy
dt
=0
oraz
d 2 l ix
dt
2
= 0,
d 2 l iy
dt
2
=0,
(7)
≠0
(8)
b) długość danego członu jest zmienna l i ≠ const , wtedy
dl ix
≠ 0,
dt
dl iy
dt
≠0
oraz
d 2 l ix
dt
2
≠ 0,
d 2 l iy
dt
2
dl i
Dla prowadnic prostoliniowych wyrażenie dt określa prędkość liniową skracania lub
(…)
… odpowiednio:
ωi =
dϕ i
dt
- prędkość kątową wektora reprezentującego człon,
dω i d 2ϕ i
=
εi =
dt
dt 2
człon.
- przyspieszenie kątowe wektora reprezentującego
Opracowali: J. Felis, H. Jaworowski
Teoria maszyn i mechanizmów
Kinematyka mechanizmów. Metoda analityczna
5
Przykład 1. Mechanizm korbowo-suwakowy
Mechanizm można zapisać trzema wektorami w sposób pokazany na Rys. 3. Należy
zatem przyjąć 2⋅3 – 2 = 4…
… 2 = −λϕ1 cos ϕ1
cos ϕ1
&
&
&
ω 2 = ϕ 2 = −λϕ1
= −λϕ1 A−1 cos ϕ1
cos ϕ 2
(P1.9)
Następnie różniczkując (P1.8) względem czasu obliczymy prędkość liniową punktu C:
&
&
v C = xC = − l1 ϕ1 (sin ϕ1 + 0 ,5 λ A −1 sin 2ϕ1 )
(P1.10)
W celu obliczenia przyspieszenia kątowego różniczkujemy (P1.9) względem czasu:
(P1.11)
Następnie różniczkujemy (P1.10) i otrzymamy przyspieszenie liniowe punktu C:
P1.12)
λ
λ3
λ
2
&&
&&
&
aC = xC = −l1ϕ1 sin ϕ1 +
sin 2ϕ1 − l1ϕ1 cos ϕ1 +
sin 2 2ϕ1 + cos 2ϕ1
2A
A
4 A3
Jeżeli korba AB = I1 obraca się ze stałą prędkością kątową, wtedy jej przyspieszenie
&&
kątowe jest równe zero czyli ϕ1 = ε 1 =
Opracowali: J. Felis, H. Jaworowski
dω1 = 0
, co należy uwzględnić w równaniach.
dt
Teoria maszyn i mechanizmów
Kinematyka mechanizmów. Metoda analityczna
7…
… 2 = 0
2 Al 2
A
8
(P2.6)
2
2
A2 + B2 + l2 − l3
B
Przyjmiemy oznaczenia: C =
, D = , zatem (P2.6) przyjmie
2 Al2
A
postać: C + cos ϕ 2 + D sin ϕ 2 = 0
(P2.7)
Po podniesieniu (P2.6) stronami do kwadratu otrzymujemy:
(1 + D 2 ) cos 2 ϕ 2 + 2C cos ϕ 2 + ( C 2 − D 2 ) = 0
(P2.8)
Po podstawieniu w = cos ϕ 2 otrzymamy równanie kwadratowe w postaci:
(1 + D 2 ) w 2 + 2Cw + ( C 2 − D 2 ) = 0
(P2.9)
z którego wyznaczymy dwa pierwiastki w1 , w 2 , a następnie dwie wartości
kąta ϕ 2 , tj. kąty ϕ 2(1 ) , ϕ 2( 2 ) .
Dwa rozwiązania równania kwadratowego (P2.9) odpowiadają dwóm wariantom położenia członów mechanizmu czworoboku przegubowego przy
ustalonym położeniu członu napędzającego ϕ1 co pokazano na Rys. 4. Kąt
ϕ 3 znajdziemy z równania (P2.4). Otrzymamy odpowiednio: ϕ 3(1 ) , ϕ 3( 2 ) .
W celu wyznaczenia…
… )
2
(P1.5)
2
2
Dalej oznaczymy: A = cos ϕ 2 = 1 − sin ϕ 2 = 1 − λ sin ϕ1
Opracowali: J. Felis, H. Jaworowski
(P1.6)
Teoria maszyn i mechanizmów
Kinematyka mechanizmów. Metoda analityczna
6
W celu wyznaczenia prędkości liniowej oraz przyspieszenia liniowego punktu C konieczne jest wprowadzenie wektora promienia wodzącego tego punktu rC .
Wektor promień wodzący dowolnego mechanizmu płaskiego…
... zobacz całą notatkę
Komentarze użytkowników (0)