To tylko jedna z 21 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę


Teoria maszyn i mechanizmów
Kinematyka mechanizmów. Metoda grafoanalityczna
1
ANALIZA KINEMATYCZNA MECHANIZMÓW PŁASKICH
METODA GRAFOANALITYCZNA
Rodzaje ruchu członów mechanizmów płaskich
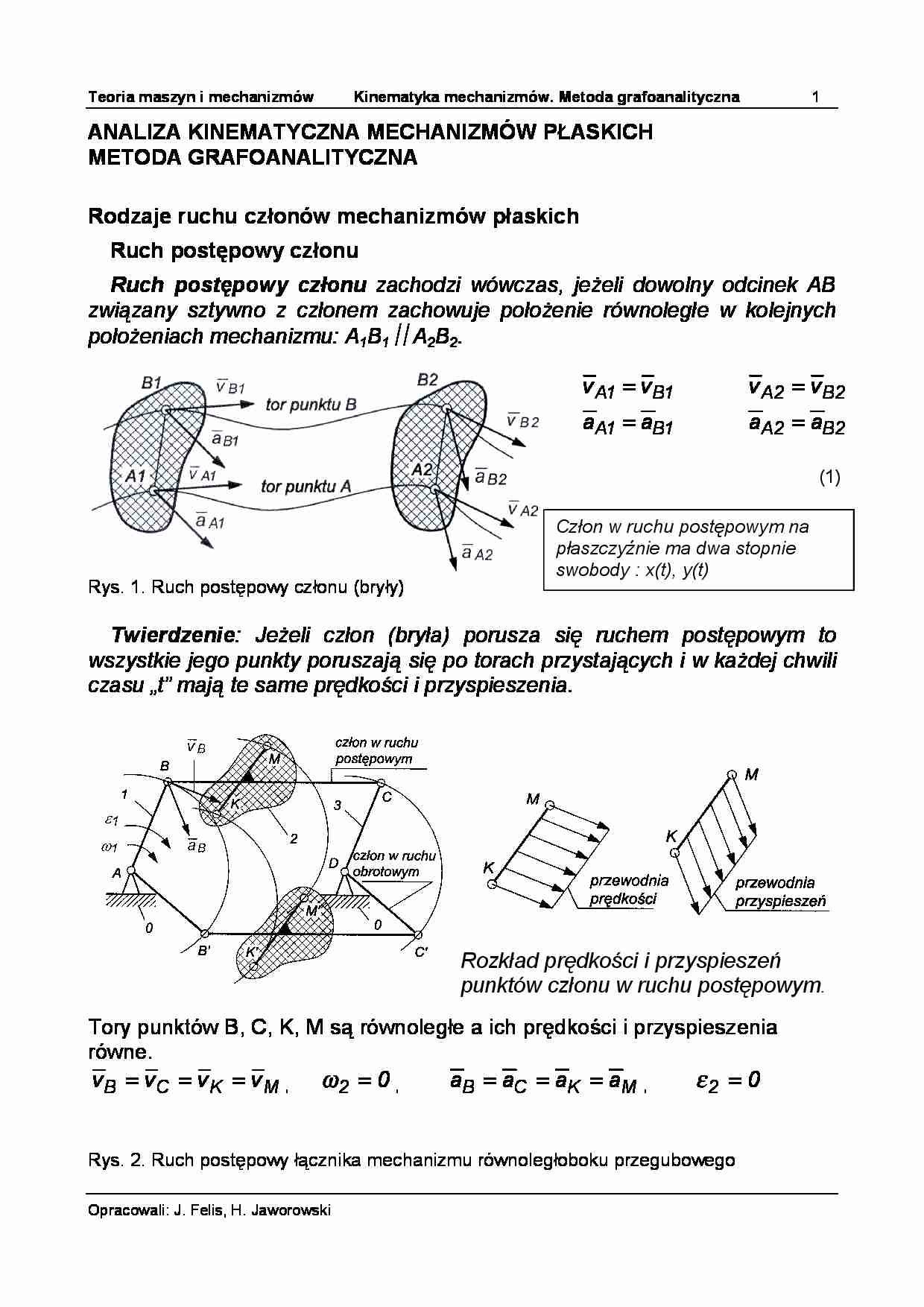
Ruch postępowy członu
Ruch postępowy członu zachodzi wówczas, jeżeli dowolny odcinek AB
związany sztywno z członem zachowuje położenie równoległe w kolejnych
położeniach mechanizmu: A1B1 A2B2.
v A1 = v B1
v A2 = v B2
aA1 = aB1
aA2 = aB2
(1)
Rys. 1. Ruch postępowy członu (bryły)
Człon w ruchu postępowym na
płaszczyźnie ma dwa stopnie
swobody : x(t), y(t)
Twierdzenie: Jeżeli człon (bryła) porusza się ruchem postępowym to
wszystkie jego punkty poruszają się po torach przystających i w każdej chwili
czasu „t” mają te same prędkości i przyspieszenia.
Rozkład prędkości i przyspieszeń
punktów członu w ruchu postępowym.
Tory punktów B, C, K, M są równoległe a ich prędkości i przyspieszenia
równe.
v B = vC = v K = v M ,
ω2 = 0 ,
aB = aC = aK = aM ,
ε2 = 0
Rys. 2. Ruch postępowy łącznika mechanizmu równoległoboku przegubowego
Opracowali: J. Felis, H. Jaworowski
Teoria maszyn i mechanizmów
Kinematyka mechanizmów. Metoda grafoanalityczna
2
Ruch obrotowy bryły
Ruch obrotowy bryły zachodzi wtedy gdy wszystkie punkty tej bryły
poruszają się po torach kołowych leżących w płaszczyznach do siebie
równoległych. Środki geometryczne torów (okręgów) leżą na jednej prostej,
która jest osią obrotu bryły.
Bryła w ruchu obrotowym ma jeden stopień
swobody, ϕ = ϕ ( t ) ,
Rys. 3. Bryła w ruchu obrotowym
Kąt obrotu bryły:
ϕ = ϕ(t )
(2a)
dϕ
ω( t ) =
Prędkość kątowa:
dt
Przyspieszenie kątowe:
(2b)
dω d 2 ϕ
=
ε( t ) =
dt
dt 2
Prędkość liniowa dowolnego punktu bryły:
(2c)
v =ω ×r,
v = ω ⋅r
(2d)
Przyspieszenie liniowe styczne dowolnego punktu bryły:
at = ε × r,
at = ε ⋅ r
(2e)
Przyspieszenie liniowe normalne dowolnego punktu bryły:
a n = ω ×v = ω ×ω × r ,
an = ω2 ⋅ r
(2f)
v B = ω ⋅ AB
n
aB = ω 2 ⋅ AB,
t
aB = ε ⋅ AB
aB = AB ω 4 + ε 2
v
v
ω= B = M
AB AM
tgβ =
t
aB
n
aB
=
ε ⋅ AB
ω 2 ⋅ AB
Rys. 4. Rozkład prędkości i przyspieszeń liniowych członu w ruchu obrotowym
Opracowali: J. Felis, H. Jaworowski
=
ε
ω2
Teoria maszyn i mechanizmów
Kinematyka mechanizmów. Metoda grafoanalityczna
3
Ruch płaski członu
Ruch płaski członu (bryły) zachodzi wtedy, gdy wszystkie jego punkty
poruszają się w płaszczyznach równoległych do pewnej płaszczyzny
nieruchomej zwanej płaszczyzną kierowniczą.
Każdy punkt członu w ogólnym przypadku posiada inne co do wartości
i kierunku prędkość i przyspieszenie. Wszystkie wektory prędkości
i przyspieszeń leżą w płaszczyznach równoległych do płaszczyzny
kierowniczej.
Oxy – nieruchomy układ współrzędnych,
O1x1y1 – ruchomy układ współrzędnych
wykonujący translację (ruch postępowy)
xO1 = xO1(t), yO1 = yO1(t),
O1ξη - ruchomy układ współrzędnych
związany sztywno z bryłą poruszającą
się ruchem płaskim, wykonujący
równocześnie translację xO1= xO1(t),
yO1= yO1(t) oraz rotację ϕz = ϕz(t).
Rys. 5. Stopnie swobody bryły w ruchu płaskim
(…)
… się wzorem:
v b = v u + vw
(7)
gdzie:
vu - prędkość unoszenia (prędkość punktu sztywno związanego z układem
ruchomym), v u = v O1 + ωu × r
vw - prędkość względna punktu (prędkość punktu względem ruchomego
układu współrzędnych),
v O1 - prędkość początku układu ruchomego wynikająca z jego translacji,
ωu - prędkość kątowa układu ruchomego,
r - wektor promień wodzący rozważanego punktu w układzie ruchomym,
ω…
… poruszającego się po prostoliniowej prowadnicy
D1 - punkt należący do członu 1 (prowadnica) i sztywno z nim związany,
D2 - punkt należący do członu 2 (suwak), który przemieszcza się względem
punktu D1
Prędkość bezwzględną punktu środka suwaka v D 2 zapiszemy za pomocą
równania wektorowego:
v D2 = v D1 + v D2D1
⊥ AD
IIAD
gdzie: v D1 = ω1 ⋅ AD - prędkość unoszenia punktu D1 wynikająca z
obrotowego uchu…
… jest obrotowy ruch prowadnicy - prędkość unoszenia v B1 ,
natomiast ruchem względnym jest ruch suwaka po prostoliniowej prowadnicy prędkość względna v B 2 B1 .
( v B2 ) = ( v B1 ) + ( v B2 B1 )
⊥ BC
⊥ AB
II AB
(P3.2)
Rozwiązując wykreślnie równanie (P3.2) znajdziemy punkt przecięcia kierunków prędkości
( v B2 ) , oraz prędkości ( v B2 B1 ) tj. punkt b2.
( v B 2 ) = ( v B3 )
ω3 =
( v B3 ) ⋅ kv
BC
Rys. 16. Plan…
... zobacz całą notatkę
Komentarze użytkowników (0)