

Fragment notatki:
3.1.1. Własności sił działających na ciało sztywne
Statyka zajmuje się badaniem sił działających na ciała znajdujące się w
spoczynku. Wtedy siły działające na ciało, które pozostaje w spoczynku, muszą się
równoważyć, czyli być w równowadze. I właśnie ustalanie warunków równowagi
będzie głównym zadaniem statyki.
Skutek mechaniczny wywołany przez działanie siły na ciało będzie w ogólnym
przypadku zależał od punktu przyłożenia siły. Skutek wywołany przez siłę będzie
polegał na zmianie ruchu ciała bądź jego odkształceniu. W przypadku ciała
sztywnego skutkiem działania siły na takie ciało może być jedynie zmiana jego
ruchu.
Niżej podamy najważniejsze własności sił, na których opiera się statyka.
Własności te nazywamy często aksjomatami lub zasadami statyki.
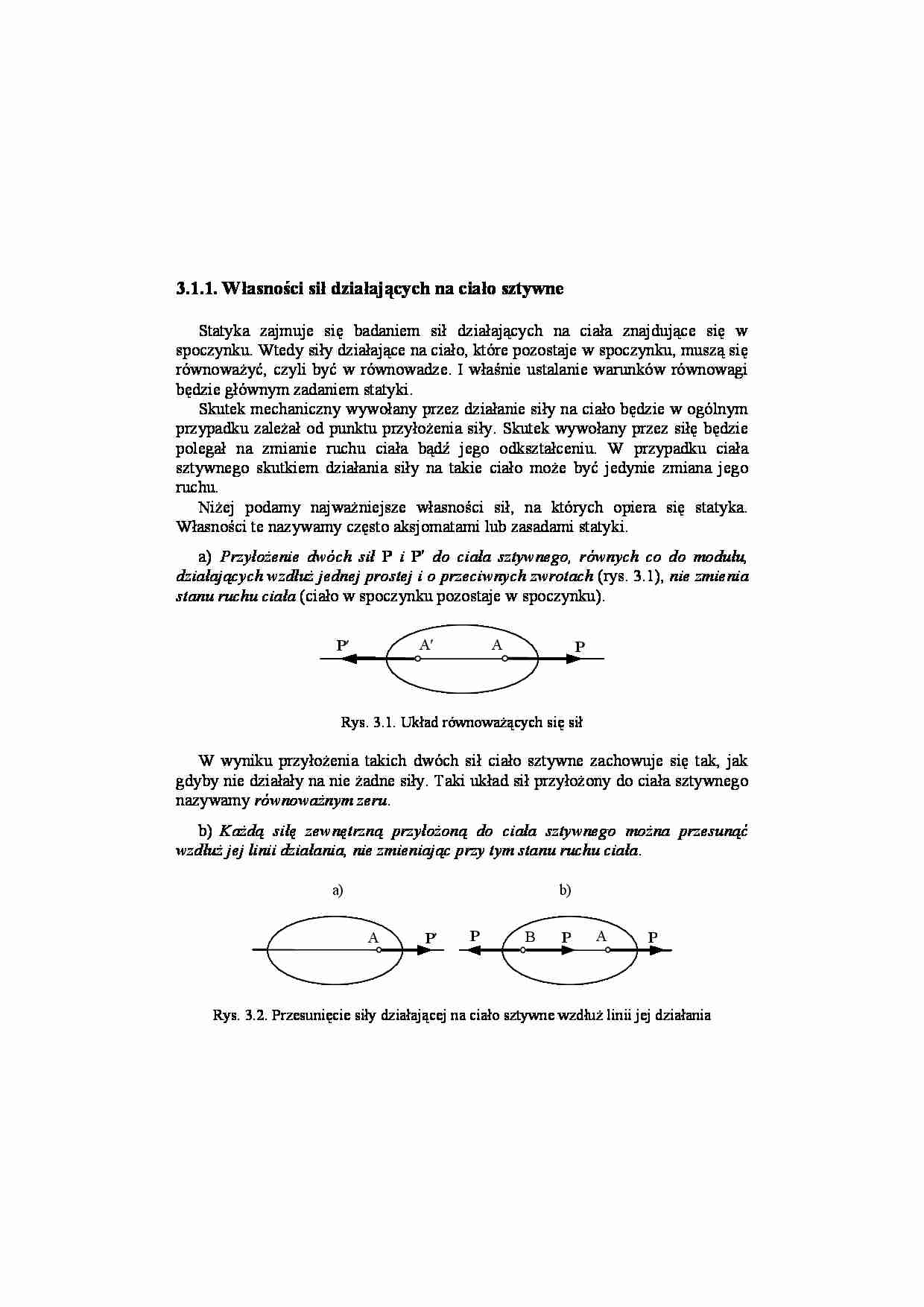
a) Przyłożenie dwóch sił P i P′ do ciała sztywnego, równych co do modułu,
działających wzdłuż jednej prostej i o przeciwnych zwrotach (rys. 3.1), nie zmienia
stanu ruchu ciała (ciało w spoczynku pozostaje w spoczynku).
A′
P′
A
P
Rys. 3.1. Układ równoważących się sił
W wyniku przyłożenia takich dwóch sił ciało sztywne zachowuje się tak, jak
gdyby nie działały na nie żadne siły. Taki układ sił przyłożony do ciała sztywnego
nazywamy równoważnym zeru.
b) Każdą siłę zewnętrzną przyłożoną do ciała sztywnego można przesunąć
wzdłuż jej linii działania, nie zmieniając przy tym stanu ruchu ciała.
a)
b)
A
P′
P
B
P
A
P
Rys. 3.2. Przesunięcie siły działającej na ciało sztywne wzdłuż linii jej działania
Załóżmy, ze siła P jest przyłożona do ciała sztywnego w punkcie A, jak na
rys. 3.2a. Do dowolnego punktu B leżącego na linii działania tej siły przyłóżmy
dwie równoważące się siły P i P′ = –P, czyli układ zerowy (rys. 3.2b). Widzimy,
że siły P i P′ przyłożone odpowiednio w punktach A i B tworzą układ zerowy,
zatem można je pominąć. W efekcie zostaje nam jedynie siła P przyłożona w
punkcie B.
Z przeprowadzonego wywodu wynika, że siła zewnętrzna działająca na ciało
sztywne jest wektorem przesuwnym.
c) Do każdego układu sił działających na ciało sztywne można dodać bez
zmiany stanu jego ruchu kilka sił o wspólnym punkcie przyłożenia, których suma
wektorowa (geometryczna) jest równa zeru.
d) Stan ruchu ciała nie ulegnie zmianie, jeżeli kilka sił zaczepionych w jednym
punkcie zastąpimy ich sumą geometryczną, i odwrotnie, gdy jedną siłę zastąpimy
przez kilka sił, których suma geometryczna jest równa tej sile.
Każdy układ sił zewnętrznych działających na ciało sztywne można zastąpić
układem równoważnym, czyli powodującym ten sam skutek mechaniczny.
Poszukiwanie układów równoważnych danemu układowi sił będzie ważnym
zadaniem statyki. Stosowanie wymienionych w punktach a, b, c i d własności sił
działających na ciało sztywne do przekształceń dowolnego układu sił
zewnętrznych nazywamy przekształceniami elementarnymi. Celem przekształceń
elementarnych będzie poszukiwanie prostszych układów sił równoważnych
danemu układowi. W szczególnym przypadku układ sił można sprowadzić do
jednej siły, którą będziemy
(…)
…
wszystkich sił, równoważnych wypadkowej, względem tego samego punktu.
3.6. Para sił
Linie działania dwóch sił mogą zajmować względem siebie różne położenia w
przestrzeni. Mogą się pokrywać, przecinać, być równoległe lub wichrowate.
Jeżeli linie działania się pokrywają, czyli dwie siły działają wzdłuż jednej
prostej, to przy równych modułach i przeciwnych zwrotach są równoważne zeru, w
przeciwnym razie dają…
…, ale nie równoważą się, gdyż działając na ciało materialne,
będą powodować jego obrót.
Obliczymy teraz moment pary sił względem dowolnego punktu O. Będzie on
równy sumie momentów sił P i P ′ względem tego punktu:
M O (P ) + M O (P ′) =r A × P + rA′ × P ′ .
Po podstawieniu do tego wzoru zależności wynikającej z rysunku:
rA = rA′ + rA′A oraz P = − P ′
otrzymamy:
M
M>0
A
rA′A
P
P
rA
A′
rA
h
O
Rys. 3.19. Para sił
M…
… zapisać jako
M = Ph ,
(3.20)
gdzie h nazywamy ramieniem pary sił.
Wartość momentu pary sił będziemy uważać za dodatnią, jeżeli patrząc od
strony strzałki momentu M, para sił wywołuje obrót w kierunku przeciwnym do
kierunku ruchu wskazówek zegara; w przeciwnym razie przyjmujemy wartość
ujemną.
Na zakończenie tego punktu podamy bez dowodów podstawowe własności pary
sił [7, 11].
1. Dwie pary sił leżące…
… można sprowadzić dany
układ, jest para sił.
c) Jeżeli W ≠ 0, a M S = 0 , to układ można sprowadzić do jednej siły W
działającej wzdłuż osi centralnej, czyli do wypadkowej. W tym przypadku ze
wzoru (3.37) wynika bezpośrednio, że iloczyn skalarny wektora głównego W i
momentu głównego M O jest równy zeru. Oznacza to, że moment główny jest
prostopadły do wektora głównego. Zatem analityczny warunek istnienia…
… będzie w równowadze. Aby poszczególne
punkty naszego układu były w równowadze, muszą się one poruszać w inercjalnym
układzie współrzędnych ruchem jednostajnym prostoliniowym lub pozostawać w
spoczynku. W statyce interesuje nas oczywiście stan spoczynku.
Aby punkt był w równowadze zgodnie z pierwszym prawem Newtona, suma
wszystkich sił działających na ten punkt musi być równa zeru. Warunek taki musi
być spełniony…
… zapisać w postaci
x
iloczynu
modułu
siły
Pk
Rys. 3.31. Środek układu sił równoległych
opatrzonego znakiem i wektora
jednostkowego e:
Pk = Pk e .
(a)
Po uwzględnieniu tej zależności wektor główny układu sił równoległych możemy
przedstawić w postaci:
W=
⎛ n
⎞
Pk = ⎜ Pk ⎟ e .
⎝ k =1 ⎠
k =1
n
∑
∑
(b)
Jeżeli przyjmiemy dowolny biegun redukcji O i oznaczymy wektory wodzące
punktów zaczepienia sił przez rk (k = 1, 2, . . . , n), to po uwzględnieniu wzoru (a)
moment główny względem tego bieguna
⎛ n
⎞
rk × Pk = ⎜ rk Pk ⎟ × e .
(c)
⎝ k =1
⎠
k =1
W celu wyznaczenia położenia punktu C opisanego wektorem wodzącym rC
obliczymy moment główny względem tego punktu. Na podstawie twierdzenia o
momencie głównym (3.29) moment główny MC wyraża wzór:
MO =
n
∑
∑
M C = M O + CO × W .
Po uwzględnieniu, że CO = − rC…
… (k = 1, 2, . . . , n), na
które działają siły ciężkości Gk (rys. 4.1). Niech położenie tych punktów względem
punktu odniesienia O określają wektory wodzące rk, jak na rysunku. Wiadomo, że
siły ciężkości poszczególnych punktów są równe iloczynowi masy przez
przyśpieszenie ziemskie, Gk = mk g, i są skierowane do środka kuli ziemskiej.
Ponieważ wymiary układów materialnych rozpatrywanych…
…, utwierdzenie, zawieszenie na
wiotkich cięgnach, podparcie na prętach przegubowych, oparcie o gładką
powierzchnię.
z
a)
b)
Rz
Ry
R
R
Ry
Rx
O
y
O
y
Rx
x
x
Rys. 3.5. Przeguby: a) kulisty, b) walcowy
Przegub kulisty składa się z pręta o zakończeniu w kształcie kuli, która jest
osadzona w kulistym łożysku (rys. 3.5a). Podpora taka unieruchamia koniec pręta,
ale umożliwia jego obrót wokół dowolnej osi. Kierunek…
…
kierunkach i obrót wokół tego końca. W miejscu utwierdzenia A wystąpi reakcja
utwierdzenia RA i moment utwierdzenia MA (rys. 3.7).
Taka podpora wprowadza do zadania trzy niewiadome: Rax, Ray i MA.
Zawieszenie na wiotkich cięgnach. Jeżeli ciało materialne jest zawieszone
na nieważkich, idealnie wiotkich cięgnach, czyli takich, które nie mogą przenosić
żadnych sił poprzecznych, to reakcje S1, S2 cięgien…
…. Wyznaczyć położenie środka ciężkości jednorodnego ostrosłupa
foremnego o podstawie kwadratu o boku b i wysokości h (rys. 4.3).
Rozwiązanie. Ponieważ oś z jest osią symetrii, środek ciężkości będzie leżał na
tej osi, czyli x C = y C = 0 . Wystarczy zatem wyznaczyć jedną współrzędną z C
z trzeciego wzoru (4.12).
z
dz
h
C
bz
z
b
O
y
b
x
Rys. 4.3. Wyznaczanie środka ciężkości ostrosłupa
zC =
∫ zdV
V
V…
... zobacz całą notatkę
Komentarze użytkowników (0)