To tylko jedna z 4 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę
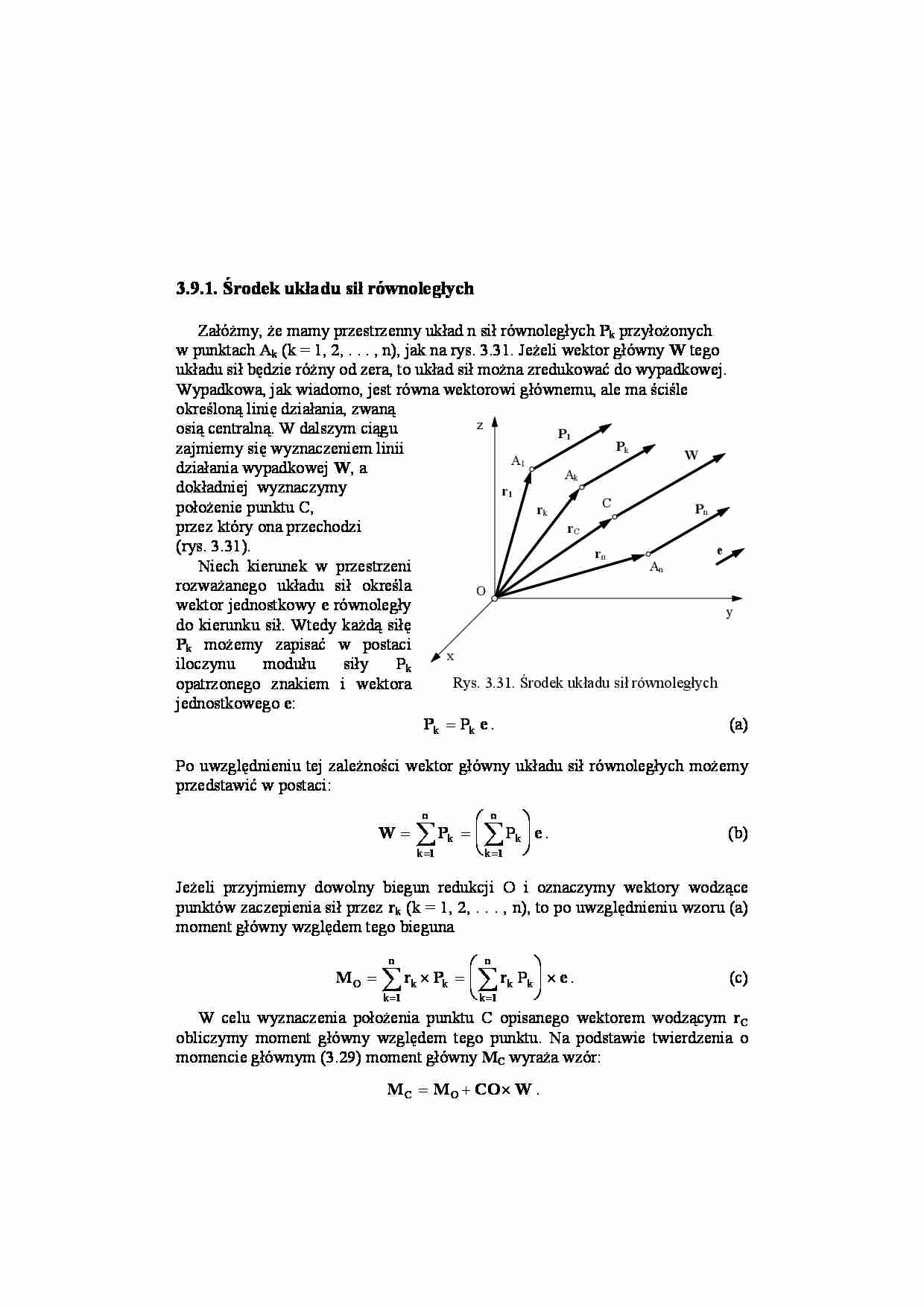


3.9.1. Środek układu sił równoległych
Załóżmy, że mamy przestrzenny układ n sił równoległych Pk przyłożonych
w punktach Ak (k = 1, 2, . . . , n), jak na rys. 3.31. Jeżeli wektor główny W tego
układu sił będzie różny od zera, to układ sił można zredukować do wypadkowej.
Wypadkowa, jak wiadomo, jest równa wektorowi głównemu, ale ma ściśle
określoną linię działania, zwaną
z
osią centralną. W dalszym ciągu
P1
Pk
zajmiemy się wyznaczeniem linii
W
A1
działania wypadkowej W, a
Ak
dokładniej wyznaczymy
r1
C
położenie punktu C,
Pn
rk
przez który ona przechodzi
rC
(rys. 3.31).
e
rn
An
Niech kierunek w przestrzeni
rozważanego układu sił określa
O
wektor jednostkowy e równoległy
y
do kierunku sił. Wtedy każdą siłę
Pk możemy zapisać w postaci
x
iloczynu
modułu
siły
Pk
Rys. 3.31. Środek układu sił równoległych
opatrzonego znakiem i wektora
jednostkowego e:
Pk = Pk e .
(a)
Po uwzględnieniu tej zależności wektor główny układu sił równoległych możemy
przedstawić w postaci:
W=
⎛ n
⎞
Pk = ⎜ Pk ⎟ e .
⎝ k =1 ⎠
k =1
n
∑
∑
(b)
Jeżeli przyjmiemy dowolny biegun redukcji O i oznaczymy wektory wodzące
punktów zaczepienia sił przez rk (k = 1, 2, . . . , n), to po uwzględnieniu wzoru (a)
moment główny względem tego bieguna
⎛ n
⎞
rk × Pk = ⎜ rk Pk ⎟ × e .
(c)
⎝ k =1
⎠
k =1
W celu wyznaczenia położenia punktu C opisanego wektorem wodzącym rC
obliczymy moment główny względem tego punktu. Na podstawie twierdzenia o
momencie głównym (3.29) moment główny MC wyraża wzór:
MO =
n
∑
∑
M C = M O + CO × W .
Po uwzględnieniu, że CO = − rC , oraz wzorów (b) i (c) otrzymamy:
⎛ n
⎞
⎛ n
⎞
⎛ n
M C = ⎜ rk Pk ⎟ × e− rC × ⎜ Pk ⎟ e = ⎜ rk Pk − rC
⎝ k =1
⎝ k =1 ⎠
⎠
⎝ k =1
∑
∑
∑
⎞
n
∑P ⎟ ×e.
⎠
k
(d)
k =1
Ponieważ przez punkt C przechodzi wypadkowa W, moment główny MC
względem tego punktu musi być równy zeru. Zatem wzór (d) przekształca się w
równanie:
⎛ n
⎜ rk Pk − rC
⎝ k =1
⎞
n
∑
∑P ⎟ × e = 0.
⎠
(e)
k
k =1
Aby powyższe równanie było spełnione dla dowolnego kierunku wektora
jednostkowego e, wyrażenie w nawiasie musi być równe zeru:
n
∑
rk Pk − rC
k =1
n
∑P
= 0.
k
k =1
Stąd położenie punktu C określa wzór wektorowy:
n
∑r
k
rC =
Pk
k =1
n
∑P
.
(3.54)
k
k =1
Można udowodnić [16], że jeżeli wszystkie siły Pk obrócimy o ten sam kąt, nie
zmieniając ich punktów przyłożenia, to wypadkowa tego obróconego układu sił
równoległych również przejdzie przez punkt C.
Punkt C, przez który przechodzi wypadkowa układu sił równoległych o
określonych punktach przyłożenia, niezależnie od ich kierunku, nazywamy
środkiem układu sił równoległych.
Po przyjęciu w biegunie O początku prostokątnego układu współrzędnych x, y,
z i wyrażeniu wektorów rk i rC we wzorze za pomocą ich współrzędnych:
rk = x k i + y k j+ z k k , rC = x C i + y C j+ z C k
z porównania wyrazów występujących przy tych samych wersorach otrzymamy
wzory na współrzędne punktu C:
n
xC =
∑
n
x k Pk
k =1
n
∑P
k
k =1
, yC =
∑
n
y k Pk
k =1
n
∑P
k
k =1
, zC =
∑z
k Pk
k =1
n
∑P
k
k =1
.
(…)
…,
jeżeli będą w nim trzy niewiadome.
W przypadku układu sił równoległych leżących w jednej płaszczyźnie, np. xy,
i równoległych do osi y sumy rzutów wszystkich sił na oś x będą tożsamościowo
równe zeru. Zatem trzy równania równowagi płaskiego dowolnego układu sił
(3.51) redukują się do równania rzutów sił na oś y i równania momentów
względem dowolnego punktu O:
n
∑
Pky = 0,
k =1
n
∑M
kO
.
(3.57)
k =1
Równania równowagi…
... zobacz całą notatkę
Komentarze użytkowników (0)