To tylko jedna z 6 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę


Zajęcia V Badanie właściwości użytkowych układów regulacji. Cel ćwiczenia . Zbadanie wpływu zakłóceń na właściwości użytkowe układu regulacji automatycznej (URA). Wstęp. Przez właściwości użytkowe układu regulacji automatycznej należy rozumieć następujące wielkości: uchyb statyczny ( ε s ),
współczynnik przeregulowania ( κ ),
czas regulacji ( t r ).
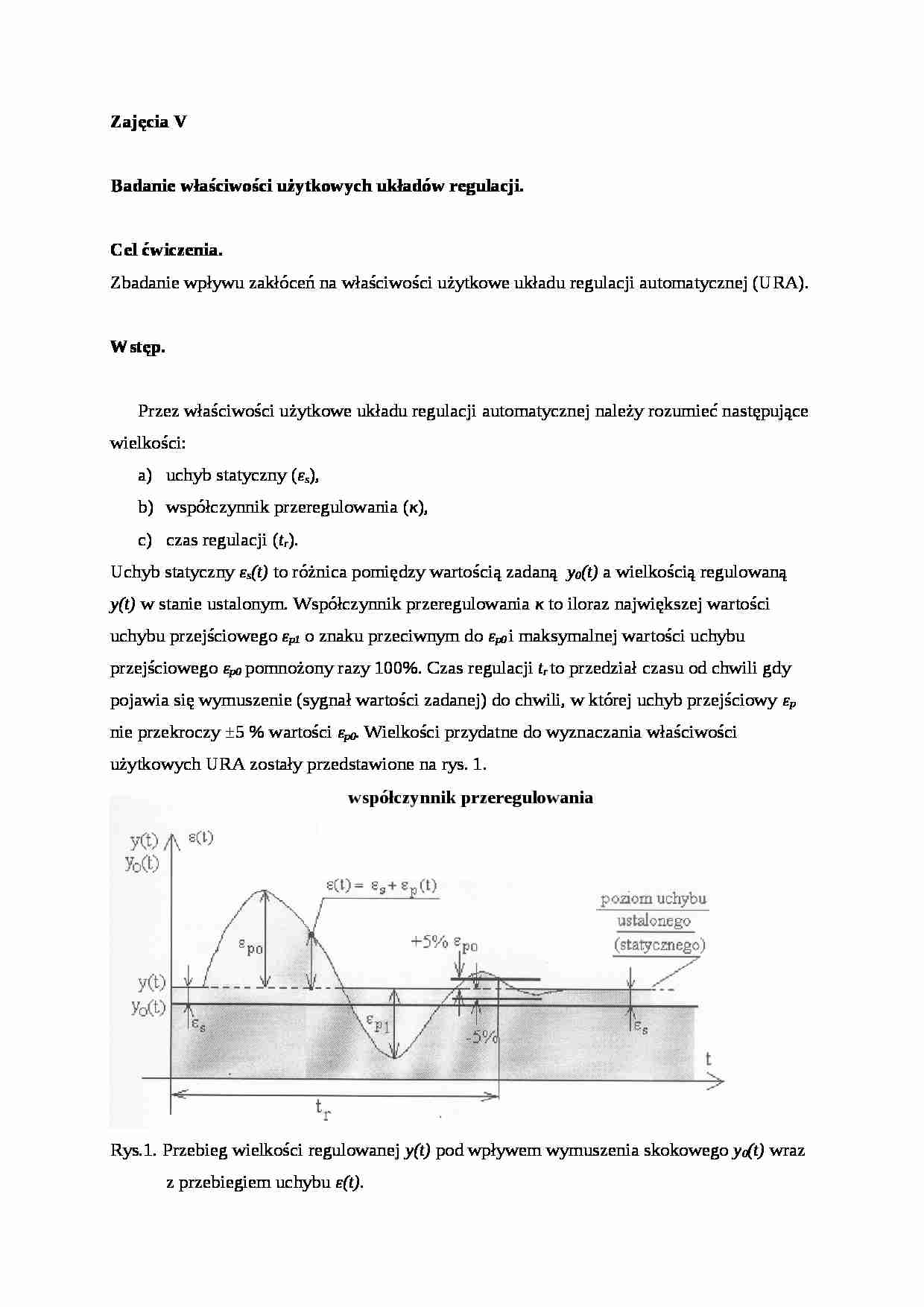
Uchyb statyczny ε s (t) to różnica pomiędzy wartością zadaną y 0 (t) a wielkością regulowaną y (t) w stanie ustalonym. Współczynnik przeregulowania κ to iloraz największej wartości uchybu przejściowego ε p1 o znaku przeciwnym do ε p0 i maksymalnej wartości uchybu przejściowego ε p0 pomnożony razy 100%. Czas regulacji t r to przedział czasu od chwili gdy pojawia się wymuszenie (sygnał wartości zadanej) do chwili, w której uchyb przejściowy ε p nie przekroczy ±5 % wartości ε p0 . Wielkości przydatne do wyznaczania właściwości użytkowych URA zostały przedstawione na rys. 1. Rys.1. Przebieg wielkości regulowanej y(t) pod wpływem wymuszenia skokowego y 0 (t) wraz z przebiegiem uchybu ε(t) .
Wyznaczenie właściwości użytkowych układu regulacji automatycznej na który nie działają żadne zakłócenia. Używając programu Matlab-Simulink przygotować układ do symulacji przedstawiony na rys. 2.
Rys.2. Widok modelu do badania układu regulacji automatycznej na który nie działają zakłócenia.
W modelu przedstawionym na rys.2 należy przyjąć:
a) wymuszenie ,
b) ,
c) ,
d) przyjąć czas symulacji ok. 30 s.
Na podstawie analizy przebiegów sygnału: wymuszającego W(s), uchybu E(s) oraz wyjściowego Y(s) (rys.3) należy dla zasymulowanego układu regulacji z dokladnością do 0.1 wyznaczyć:
uchyb statyczny ε s ,
współczynnik przeregulowania κ ,
czas regulacji t r .
Wyniki pomiarów należy przedstawić w tab. 1. Wyznaczenie właściwości użytkowych układu regulacji automatycznej na który działają zakłócenia przed obiektem . Używając programu Matlab-Simulink zasymulować układ, którego schemat przedstawiono na rys. 4.
Rys.4. Widok modelu do badania układu regulacji automatycznej na który działają zakłócenia
przed obiektem.
Transmitancje G r (s) oraz G o (s) oraz wymuszenie W(s) pozostają takie same jak pkt. 1. Dla dwóch różnych wartości amplitud
... zobacz całą notatkę
Komentarze użytkowników (0)