To tylko jedna z 3 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę


Określenia dotyczące układu ze sprzężeniem zwrotnym
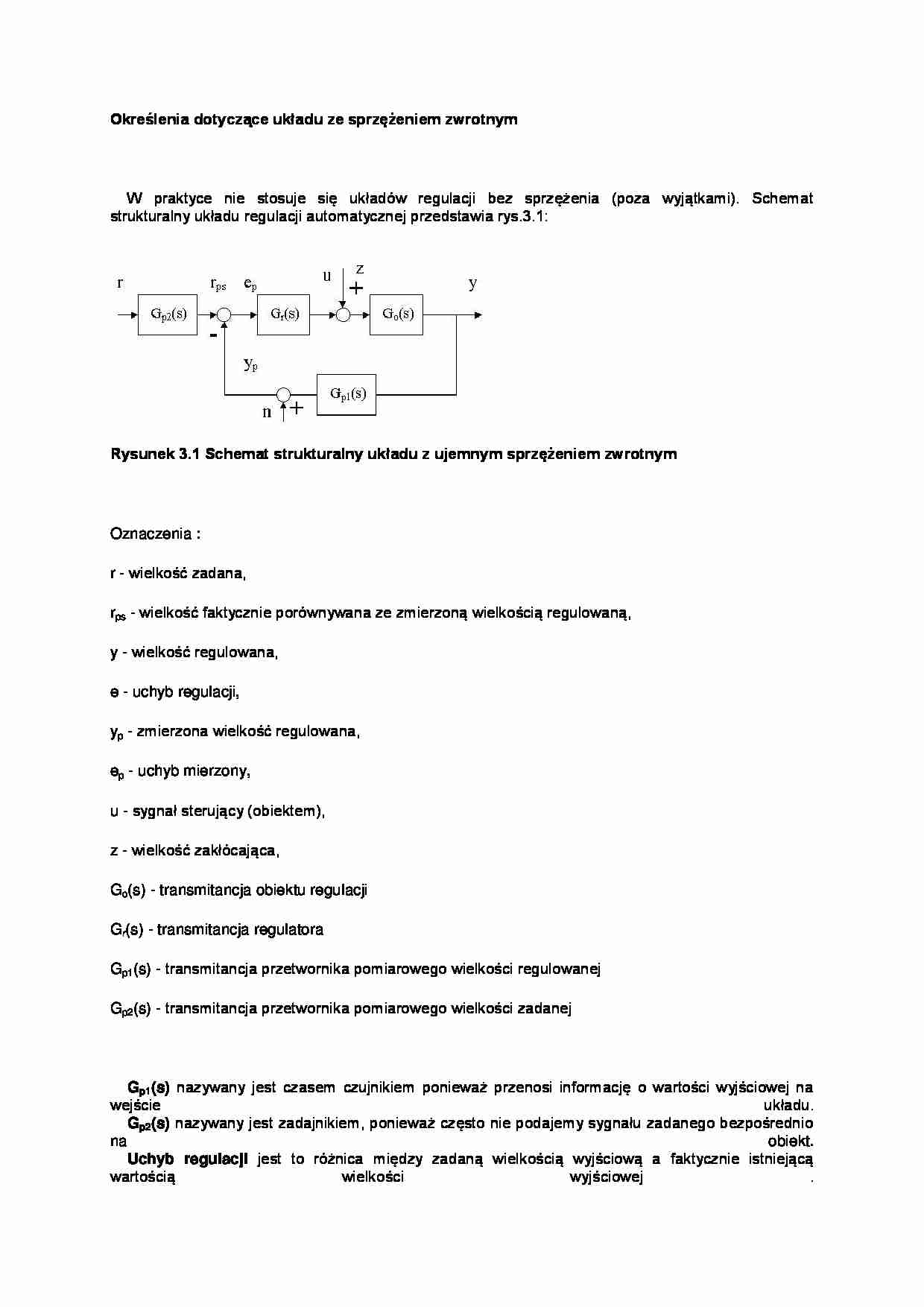
W praktyce nie stosuje się układów regulacji bez sprzężenia (poza wyjątkami). Schemat strukturalny układu regulacji automatycznej przedstawia rys.3.1:
Rysunek 3.1 Schemat strukturalny układu z ujemnym sprzężeniem zwrotnym
Oznaczenia :
r - wielkość zadana,
rps - wielkość faktycznie porównywana ze zmierzoną wielkością regulowaną, y - wielkość regulowana,
e - uchyb regulacji,
yp - zmierzona wielkość regulowana,
ep - uchyb mierzony,
u - sygnał sterujący (obiektem),
z - wielkość zakłócająca,
Go(s) - transmitancja obiektu regulacji
Gr(s) - transmitancja regulatora
Gp1(s) - transmitancja przetwornika pomiarowego wielkości regulowanej
Gp2(s) - transmitancja przetwornika pomiarowego wielkości zadanej
Gp1(s) nazywany jest czasem czujnikiem ponieważ przenosi informację o wartości wyjściowej na wejście układu. Gp2(s) nazywany jest zadajnikiem, ponieważ często nie podajemy sygnału zadanego bezpośrednio na obiekt. Uchyb regulacji jest to różnica między zadaną wielkością wyjściową a faktycznie istniejącą wartością wielkości wyjściowej . Zadaniem układu regulacji jest osiągnięcie takiej wartości sygnału na wyjściu, jakiej zażądamy na wejściu. Aby tego dokonać należy mieć możliwość sprawdzenia (porównania) czy sygnał wyjściowy osiągnął zadaną wartość. W uproszczeniu, jeśli na wyjściu sygnał jest większy od zadanego musimy zmniejszyć sygnał wejściowy. W tym celu automatyka wykorzystuje ujemne sprzężenie zwrotne. Z tego powodu powstało ważne pojęcie uchybu regulacji. Uchyb regulacji jest to różnica między zadaną wartością wielkości wejściowej r a faktycznie istniejącą wartością wielkości wyjściowej y (e = r - y )*. Dynamika obiektu (równania różniczkowe opisujące obiekt są równaniami ruchu) jest od nas niezależna i aby osiągnąć cel musimy stosować korekcję**(kształtujemy charakterystyki układu regulacji poprzez dodawanie członów korekcyjnych aż do uzyskania zadowalającego efektu). Typowy uchyb regulacji e(t) na pobudzenie obiektu skokiem jednostkowym wygląda następująco (rys. 3.2): Rysunek 3.2 Przebieg typowego uchybu regulacji Należy zwrócić uwagę, że na rys. 3.1nie występuje uchyb taki jak w definicji, lecz jest to raczej sygnał różnicy ep = rps - yp. Analizujemy ten sygnał tak jakby był uchybem. Przypatrzmy się rys. 3.1 i przyjmijmy, że obiekt Go(s) to nasz silnik z rozdziału 1. Sygnałem wyjściowym y jest tu prędkość obrotowa wyrażona w rad/snatomiast sygnałem wejściowym r jest napięcie wyrażone w
(…)
… pojęcia związane z analizą układu, którego model jest już znany (nie zawsze jest możliwe uwzględnienie wszystkich cech obiektu w modelu, przeważnie model jest uproszczony). Transmitancja układu otwartego G(s) = Gp(s)Gr(s)Go(s)
Jeżeli przedstawimy tę transmitancję w postaci wymiernej właściwej, to otrzymamy
L(s) - wielomian licznikowy,
M(s) - wielomian mianownikowy,
M(s) = 0 - równanie charakterystyczne układu otwartego,
(transmitancja jest właściwa jeśli stopień wielomianu L(s) jest równy lub mniejszy od stopnia wielomianu M(s) ).
Transmitancja odpowiedniego układu zamkniętego w relacji r → yma postać
gdzie 1+G(s) = 0 - równanie charakterystyczne układu zamkniętego
M(s)+L(s)=0 - wielomian charakterystyczny układu zamkniętego
Pojęcie równania charakterystycznego układu zamkniętego jest ważne ze względu na to, że określamy za jego pomocą czy układ zamknięty będzie stabilny. Postać wielomianu charakterystycznego jest wykorzystywana np. przy badaniu stabilności w oparciu kryteria algebraiczne, których używamy wtedy, gdy znana jest postać analityczna transmitancji.
…
… rzadko tak jest. Co ważniejsze czujnik występuje zawsze (musimy zamienić np. ciśnienie, temperaturę lub inną wielkość fizyczną na proporcjonalny sygnał, którym może być napięcie lub nawet inna wielkość fizyczna) i od niego zależy czy prawidłowo odbierzemy sygnał wyjściowy (nigdy nie poznamy jego dokładnej, prawdziwej wartości choćby ze względu na zawsze występujące zakłócenia losowe (n(t), z(t…
... zobacz całą notatkę
Komentarze użytkowników (0)