To tylko jedna z 3 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę
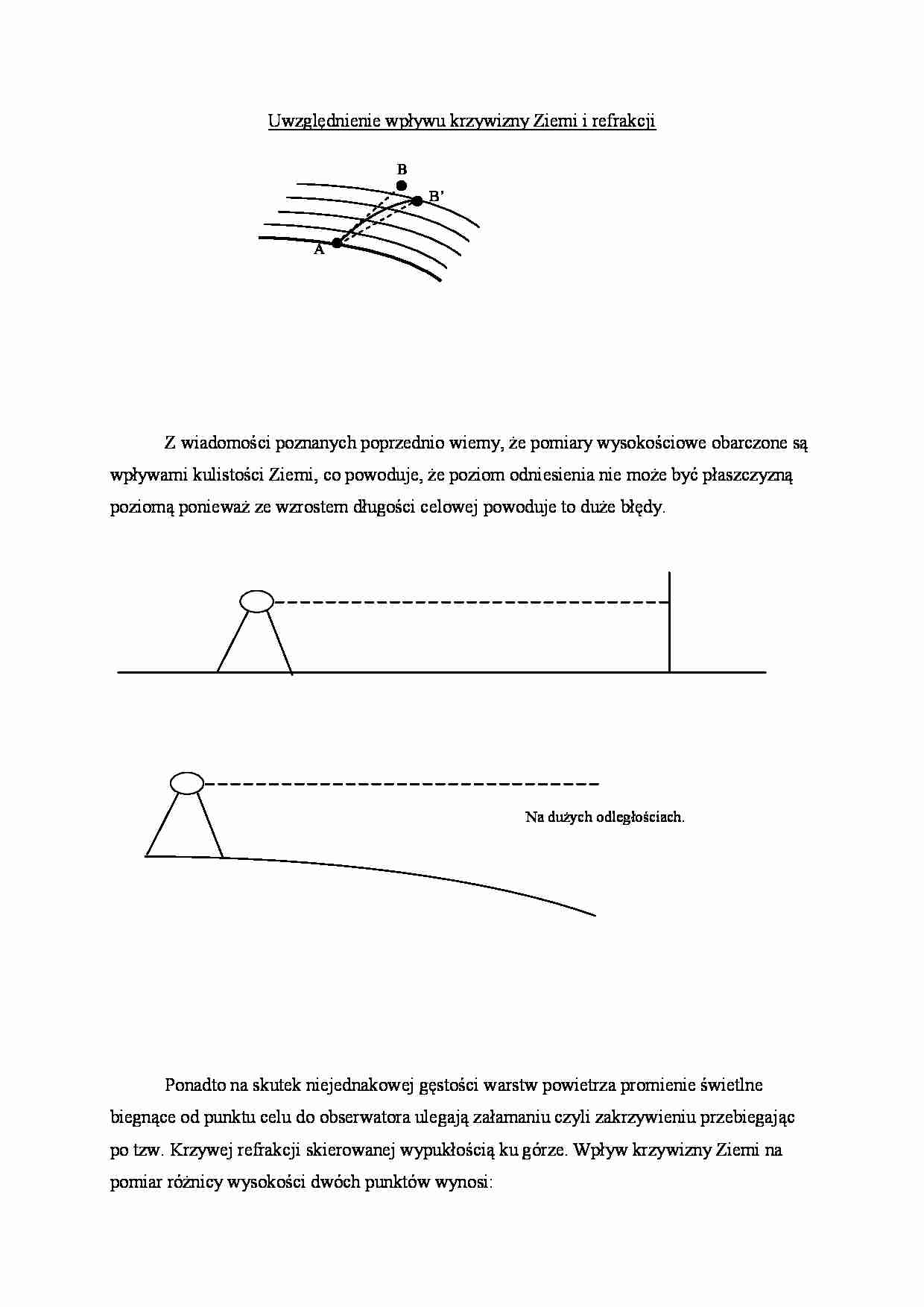


Uwzględnienie wpływu krzywizny Ziemi i refrakcji
B
B’
A
Z wiadomości poznanych poprzednio wiemy, że pomiary wysokościowe obarczone są
wpływami kulistości Ziemi, co powoduje, że poziom odniesienia nie może być płaszczyzną
poziomą ponieważ ze wzrostem długości celowej powoduje to duże błędy.
Na dużych odległościach.
Ponadto na skutek niejednakowej gęstości warstw powietrza promienie świetlne
biegnące od punktu celu do obserwatora ulegają załamaniu czyli zakrzywieniu przebiegając
po tzw. Krzywej refrakcji skierowanej wypukłością ku górze. Wpływ krzywizny Ziemi na
pomiar różnicy wysokości dwóch punktów wynosi:
dh
d2
2R
poprawka dh ma zawsze znak plus.
Wpływ refrakcji wyraża się wzorem:
r k
d2
2R
k – współczynnik refrakcji zależny od temperatury, wilgotności i ciśnienia (średnio k=0,13 na
naszych szerokościach.
Poprawka r ma zawsze znak minus.
Łączna poprawka na krzywiznę Ziemi i refrakcji:
d2
n (1 k )
2R
Stąd wzór na określenie wysokości punktu B obserwowanego z punktu A przyjmie postać:
H B H A i d tg l (1 k )
d2
2R
skąd:
k 1
2R
(h i A d tg l )
d2
II SPOSÓB
Po ustawieniu na dwóch punktach A i B dwóch tej samej klasy teodolitów mierzymy
jednocześnie w dwóch położeniach lunety kąty zenitalne celując na tarcze sygnałowe w
wysokościach w A i w B . Następnie układamy równania typu jak poprzednio:
d2
(1 k ) wB
2R
d2
H A H B iB d ctgz B
(1 k ) wA
2R
H B H A i A d ctgz A
d2 d2
0 (i A i B ) ( w A wB ) d (ctgz A ctgz B )
k
R
R
R
R
k 1 (ctgz A ctgz B ) 2 (i A i B ) ( w A wB )
d
d
Dokładność określenia różnicy wysokości przy niwelacji trygonometrycznej.
Wynika ze stosowania wzorów i dokładności pomiarów. Wzory te:
d2
h H B H A dtg
(1 k )
2R
h H B H A dtg
(1) odległość większa niż 300m
(2) odległość mniejsza niż 300 m
Obliczenie średniego błędu różnicy wysokości m h polega na obliczeniu średniego błędu
funkcji h, dla (1) wzoru będzie:
h
h
h
2
2
2
m md
m mk
d
k
2
2
2
2
h
a dla wzoru (2):
d2
n (1 k )
2R
Średnie błędy różnic wysokości h w centymetrach podane są w tabeli:
1
5
10
15
500m
1cm
1
1
1
1000m
2
3
3
3
2000m
5
5
6
6
3000m
8
8
9
10
4000m
12
12
12
13
5000m
16
16
16
18
... zobacz całą notatkę
Komentarze użytkowników (0)