To tylko jedna z 2 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę
Laboratorium Podstaw Robotyki
Protokół z realizacji ćwiczenia
SYSTEM STEROWANIA ROBOTEM MOBILNYM MINITRACKER V3 12.04.2011
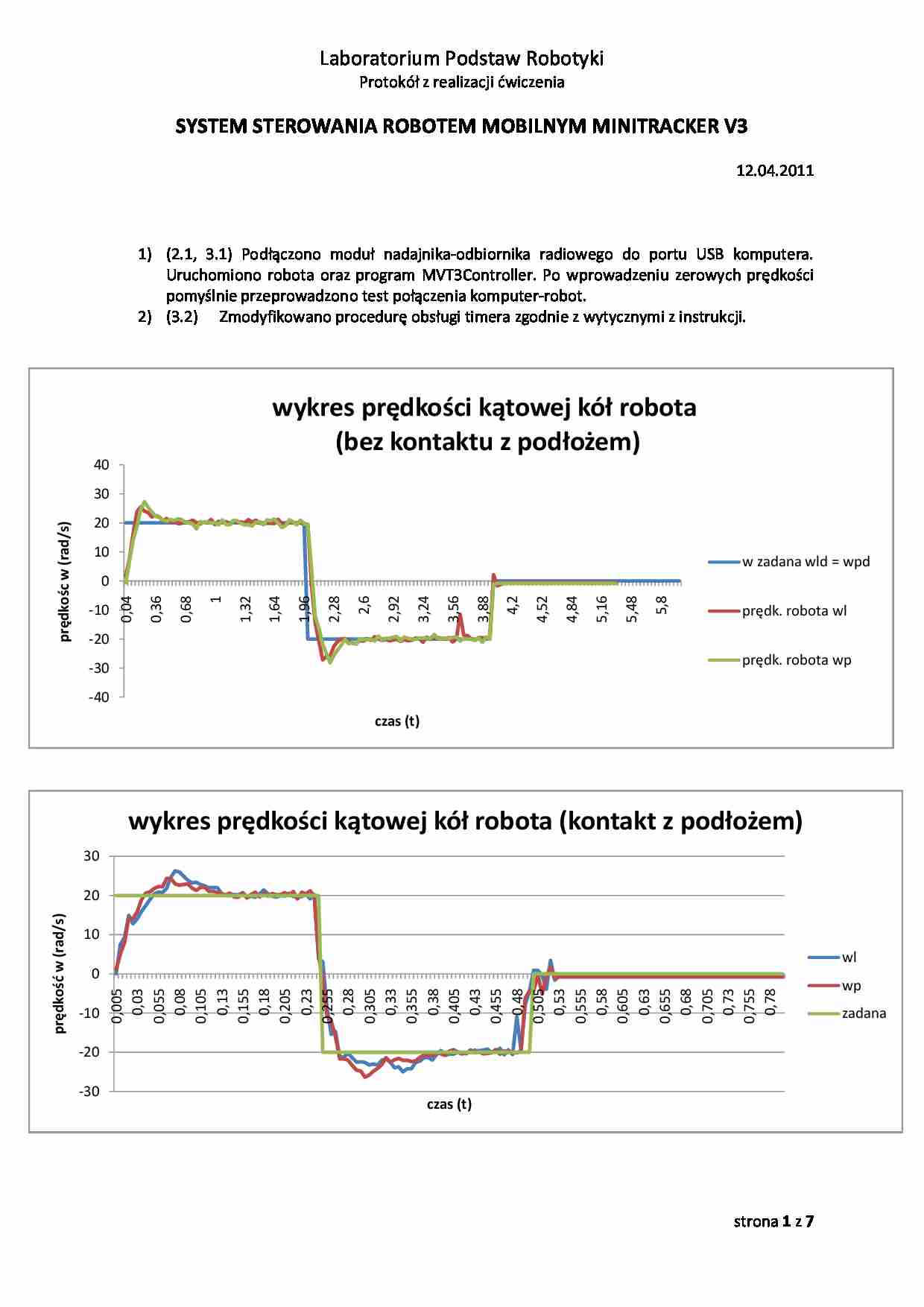
(2.1, 3.1) Podłączono moduł nadajnika-odbiornika radiowego do portu USB komputera. Uruchomiono robota oraz program MVT3Controller. Po wprowadzeniu zerowych prędkości pomyślnie przeprowadzono test połączenia komputer-robot.
(3.2) Zmodyfikowano procedurę obsługi timera zgodnie z wytycznymi z instrukcji.
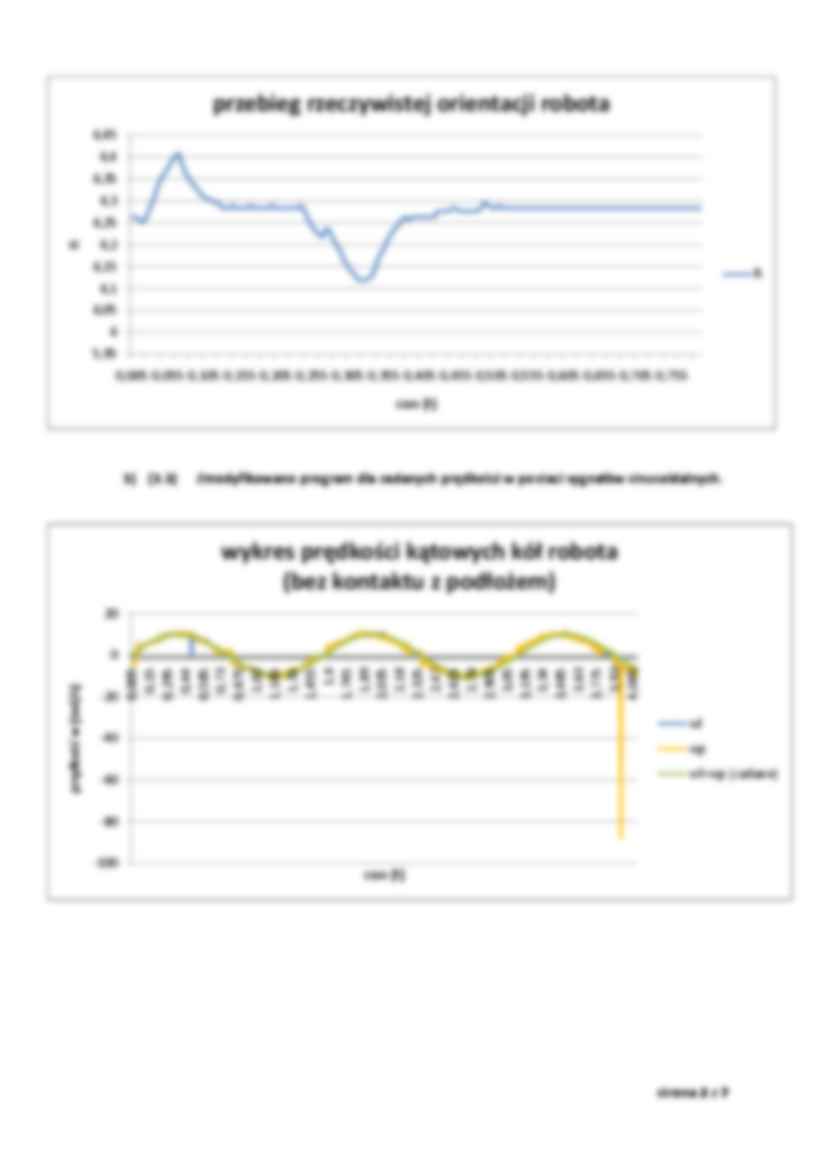
(3.3) Zmodyfikowano program dla zadanych prędkości w postaci sygnałów sinusoidalnych.
Czy rzeczywista orientacja robota w obu przypadkach jest stała? Jakie zjawisko można zauważyć w przypadku sygnałów i jak można je uzasadnić? W obu przypadkach nie jest stała.
- w 1. przypadku - fi = 0 gdyż zadane prędkości były liniowe (stałe)
- w 2. przypadku - fi ≠0 gdyż prędkość zmienia się w czasie, co powoduje zmianę przyspieszenia robota
Regulatory dążą do stabilizacji robota - występuje „lekki” efekt kołysania robota.
Co może być przyczyną dryfu orientacji przy zmianie wartości zadanych prędkości kół robota? Przypuszczalnie mogą to być szybkie zmiany prędkości zadanych na prędkości przeciwne - np. robot jedzie do tyłu a koła zaczynają się kręcić do przodu w tym samym momencie - występuje „poślizg wzdłużny”.
(3.4) Pomyślnie zaprojektowano generator zadanej trajektorii w programie MATLAB.
(3.5) Zaimplementowano zaprojektowany generator w aplikacji sterującej robotem. Badanie trajektorii przeprowadzono dla dwóch różnych prędkości kątowych (jedna 5 razy większa od drugiej).
dla prędkości w dla prędkości 5w Jakie zjawisko można zaobserwować podczas próby realizacji zadanej trajektorii? Podczas próby realizacji zadanej trajektorii możemy zaobserwować zjawisko dryfu, co wyraźnie widać na ostatnim wykresie (trajektoria dla 5w)
W jaki sposób można wyeliminować wpływ dryfu orientacji na realizację zadanej trajektorii? Zjawisko dryfu może być spowodowane błędem orientacji oraz błędami położenia x, y. Pomocnym byłoby wyznaczenie elipsoidy, która byłaby miarą błędu położenia x, y, co może mieć duże znaczenie w celu uniknięcia kolizji.
... zobacz całą notatkę
Komentarze użytkowników (0)