To tylko jedna z 3 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę


2.2. Suma i różnica wektorów
Wektory swobodne można dodawać i odejmować geometrycznie (wykreślnie)
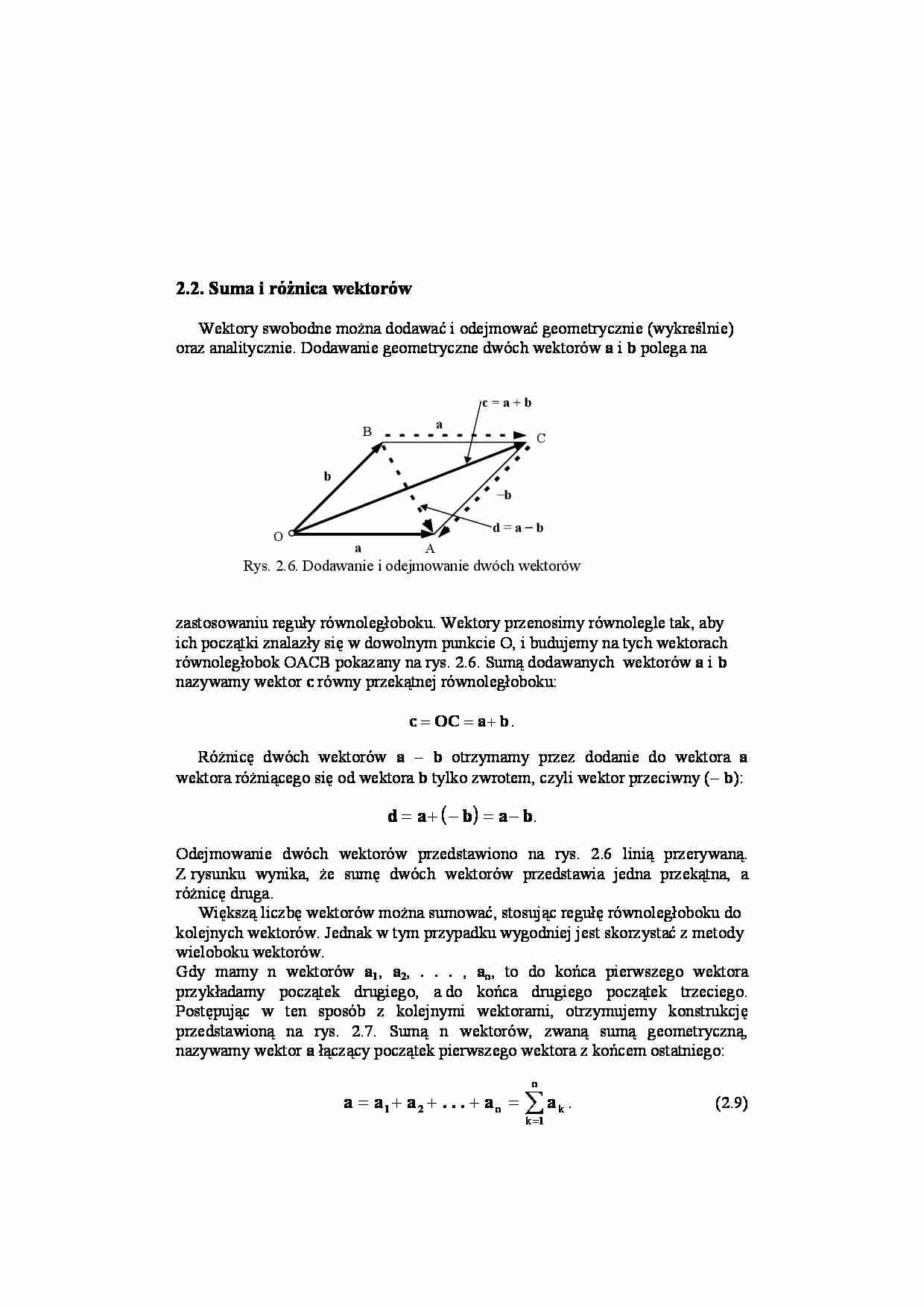
oraz analitycznie. Dodawanie geometryczne dwóch wektorów a i b polega na
c=a+b
a
B
C
b
−b
O
d=a−b
a
A
Rys. 2.6. Dodawanie i odejmowanie dwóch wektorów
zastosowaniu reguły równoległoboku. Wektory przenosimy równolegle tak, aby
ich początki znalazły się w dowolnym punkcie O, i budujemy na tych wektorach
równoległobok OACB pokazany na rys. 2.6. Sumą dodawanych wektorów a i b
nazywamy wektor c równy przekątnej równoległoboku:
c = OC = a + b .
Różnicę dwóch wektorów a − b otrzymamy przez dodanie do wektora a
wektora różniącego się od wektora b tylko zwrotem, czyli wektor przeciwny (− b):
d = a + ( − b) = a − b.
Odejmowanie dwóch wektorów przedstawiono na rys. 2.6 linią przerywaną.
Z rysunku wynika, że sumę dwóch wektorów przedstawia jedna przekątna, a
różnicę druga.
Większą liczbę wektorów można sumować, stosując regułę równoległoboku do
kolejnych wektorów. Jednak w tym przypadku wygodniej jest skorzystać z metody
wieloboku wektorów.
Gdy mamy n wektorów a1, a2, . . . , an, to do końca pierwszego wektora
przykładamy początek drugiego, a do końca drugiego początek trzeciego.
Postępując w ten sposób z kolejnymi wektorami, otrzymujemy konstrukcję
przedstawioną na rys. 2.7. Sumą n wektorów, zwaną sumą geometryczną,
nazywamy wektor a łączący początek pierwszego wektora z końcem ostatniego:
a = a1 + a 2 + . . . + a n =
n
∑a
k =1
k
.
(2.9)
an
a3
a3
a2
a1
a2
an
a1
a
A
O
Rys. 2.7. Dodawanie n wektorów
Omówioną konstrukcję nazywamy wielobokiem wektorów. Jeżeli koniec
ostatniego wektora pokrywa się z początkiem pierwszego, to suma wektorów jest
równa zeru: a = 0. Mówimy wtedy, że wielobok jest zamknięty. W przeciwnym
razie, tj. gdy a 0, wielobok jest otwarty.
Czytelnikowi pozostawiamy wykazanie, że do dodawania wektorów stosuje się
prawo przemienności:
a+ b = b+ a
oraz łączności
a + (b + c ) = (a + b ) + c .
Aby analitycznie dodać n wektorów, musimy je wyrazić za pomocą
współrzędnych z przyjętego układu współrzędnych:
(k = 1, 2, . . . n ).
a k = a kx i + a ky j + a kz k
Po podstawieniu tego wzoru do równania (2.9) otrzymamy:
n
n
k =1
k =1
(
)
n
n
n
k =1
k =1
k =1
a = ∑ a k = ∑ a kx i + a ky j+ a kz k = ∑ a kx i + ∑ a ky j + ∑ a kz k .
Po oznaczeniu w tym równaniu współrzędnych wektora a przez ax, ay, az mamy:
n
n
n
k =1
k =1
k =1
a x i + a y j+ a z k = ∑ a kx i + ∑ a ky j + ∑ a kz k .
Z obustronnego porównania wyrazów występujących przy
odpowiednich
wersorach otrzymujemy wzory na współrzędne wektora będącego sumą wektorów:
n
n
n
k =1
k =1
k =1
a x = ∑ a kx , a y = ∑ a ky , a z = ∑ a kz .
(2.10)
Otrzymane wyniki są zgodne z treścią znanego twierdzenia Charles’a, że rzut
sumy wektorów na dowolną oś jest równy sumie rzutów poszczególnych wektorów
na tę oś.
... zobacz całą notatkę
Komentarze użytkowników (0)