To tylko jedna z 8 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę


Statyka Wykład 3 St.12
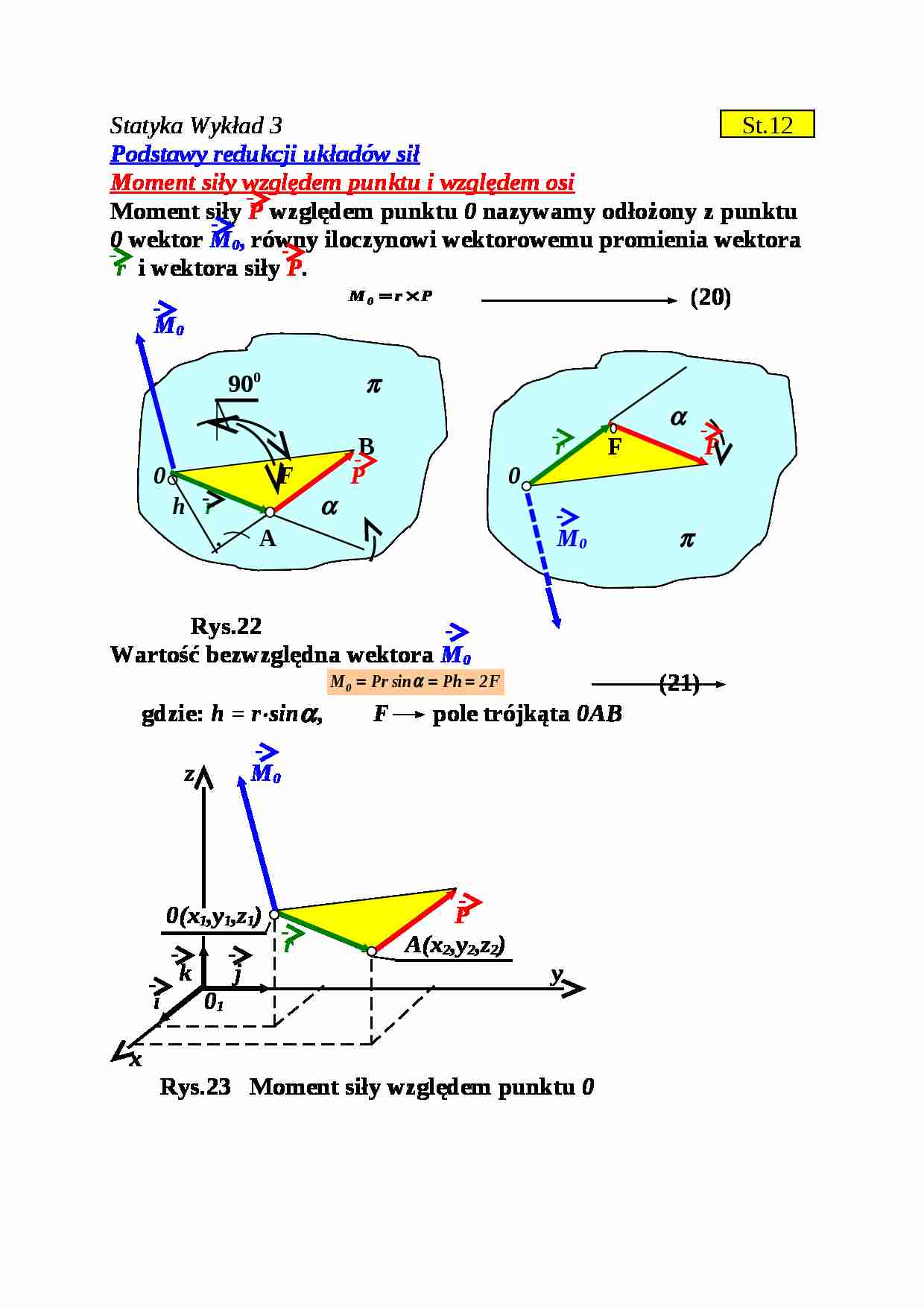
Podstawy redukcji układów sił Moment siły względem punktu i względem osi Moment siły P względem punktu 0 nazywamy odłożony z punktu 0 wektor M 0 , równy iloczy nowi wektorowemu promienia wektora r i wektora siły P . (20) M 0 90 0 π α B r F P 0 F P 0 h r α . A M 0 π Rys.22 Wartość bezwzględna wektora M 0 (21) gdzie: h = r ⋅ sin α , F pole trójkąta 0AB z M 0 0(x 1 ,y 1 ,z 1 ) P r A(x 2 ,y 2 ,z 2 ) k j y i 0 1 x Rys.23 Moment siły względem punktu 0 Moment siły P względem punktu 0 , w układzie St.13 kartezjańskim (rys.23) (22) gdzie Wzór (22) można zapisać (23) Twierdzenie Varignona Moment siły wypadkowej P przestrzennego układu sił zbieżnych względem dowolnego punktu 0 jest równy sumie geometrycznej momentów tych sił względem tego samego punktu (24). (24) Przykład 4 Punkt A przyłożenia siły P = -21 i +14 j N jest określony względem początku układu współrzędnych promieniem r A = 2 i -3 j +6 k m. Znaleźć wartość liczbową momentu tej siły względem początku układu 0 , Rozwiązanie z (22) Siły równoległe
(…)
…) otrzymujemy:
(26)
Dodając stronami równania (25) i przekształcając otrzymamy:
, (27)
Para śił
Układ dwóch sił o równych wartościach i przeciwnych zwrotach
(rys.25)
- P
*
h r0 r2 r1 = r2 + r0 P h = r0 sinϕ
ϕ r1
0 Rys.25
Moment pary sił (rys.25) St.15
(28)
(29)
(30)
Równoległe przesnięcie sił (rys.26) M
P
B P h P B P B
h h
A -P A A
Rys.26
Przykład 6
W punkcie A, opisanym promieniem rA= 4 j m przyłożono siłę P…
… Płaski układ sił
Przesyłając równolegle wszystkie siły danego układu do jednego punktu O otrzymuje się jedną siłę R, równą ich sumie geometrycznej i jedną parę o momencie MO równym sumie momentów tych par sił, ogólnie dla układu przestrzennego
dla układu płaskiego i wtedy gdzie ostatecznie
(31)
Wynik powyzszych rozważań przedstawiono na rys.28 St.17
y
Ry R M0 α
j
k x
MO 0 j Rx
z Rys. 2
Wektor główny R…
… odcinkową linii działania wypadkowej
(34)
W układzie mogą zachodzić cztery przypadki:
R = 0 i M0 = 0 układ sprowadza się do wypadkowej o linii
działania według wzoru (34)
2) R = 0 i M0 = 0 układ sprowadza się do wypadkowej przechodzącej przez środek redukcji 0
3) R = 0 i M0 = 0 układ sprowadza się do pary sił leżących
w płaszczyźnie Oxy
4) R = 0 i M0 = 0 układ jest w równowadze
Przykład 7
Dane: P1 = 2i…
… j y
i 01
x Rys.23 Moment siły względem punktu 0
Moment siły P względem punktu 0, w układzie St.13
kartezjańskim (rys.23)
(22)
gdzie Wzór (22) można zapisać (23)
Twierdzenie Varignona
Moment siły wypadkowej P przestrzennego układu sił zbieżnych względem dowolnego punktu 0 jest równy sumie geometrycznej momentów tych sił względem tego samego punktu (24).
(24)
Przykład 4
Punkt A przyłożenia siły P…
…
Statyka Wykład 3 St.12
Podstawy redukcji układów sił
Moment siły względem punktu i względem osi
Moment siły P względem punktu 0 nazywamy odłożony z punktu
0 wektor M0, równy iloczynowi wektorowemu promienia wektora r i wektora siły P.
(20)
M0
900 π α
B r F P
0 F P 0
h r α
. A M0 π
Rys.22
Wartość bezwzględna wektora M0
(21)
gdzie: h = r⋅sinα, F pole trójkąta 0AB
z M0
0(x1,y1,z1) P
r A(x2,y2,z2)
k…
… + 5j r1 = i + 3j
P2 = -3i + 4j r2 = 2j P3 = 3i - 5j r3 = 3i - 5j
Wyznaczyć wypadkową tego układu sił.
Rozwiązanie
Wektor główny i moment główny rozpatrywanego układu sił wynoszą Równanie linii działania wypadkowej wzór (34) można St.19
zapisać y R
r
i
j x
0
- 5*2
5*4
Rys.30 Wypadkowa płaskiego układu trzech sił
Równowaga dowolnego przestrzennego układu sił
co prowadzi do 6 równań algebraicznych
(35…
... zobacz całą notatkę
Komentarze użytkowników (0)