To tylko jedna z 11 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę


Dokument dotyczy ruchu obrotowego, zawiera rysunki i wzory, ma 9 stron i porusza zagadnienia takie jak: ruch obrotowy, kinematyka ruchu obrotowego, przesunięcie kątowe, prędkość kątowa, częstość kątowa, dynamika ruchu obrotowego, moment siły, moment pędu, zachowanie momentu pędu, sztywne, moment bezwładności, ruch postępowo-obrotowy ciała sztywnego, ruch precesyjny.
Wykład 12
Ruch obrotowy
Wstęp
Mówiąc o środku masy wspominaliśmy o ruchu obrotowym oraz o toczeniu się ciał. Dużym ułatwieniem w analizie układów cząstek jest możliwość rozpatrywania oddzielnego ruchu postępowego i ruchu obrotowego. Aby wprowadzić to uproszczenie zdefiniujemy dwie nowe wielkości: moment pędu i moment siły. Zasada zachowania momentu pędu jest równie istotna jak zasada zachowania pędu i zasada zachowania energii.
Kinematyka ruchu obrotowego
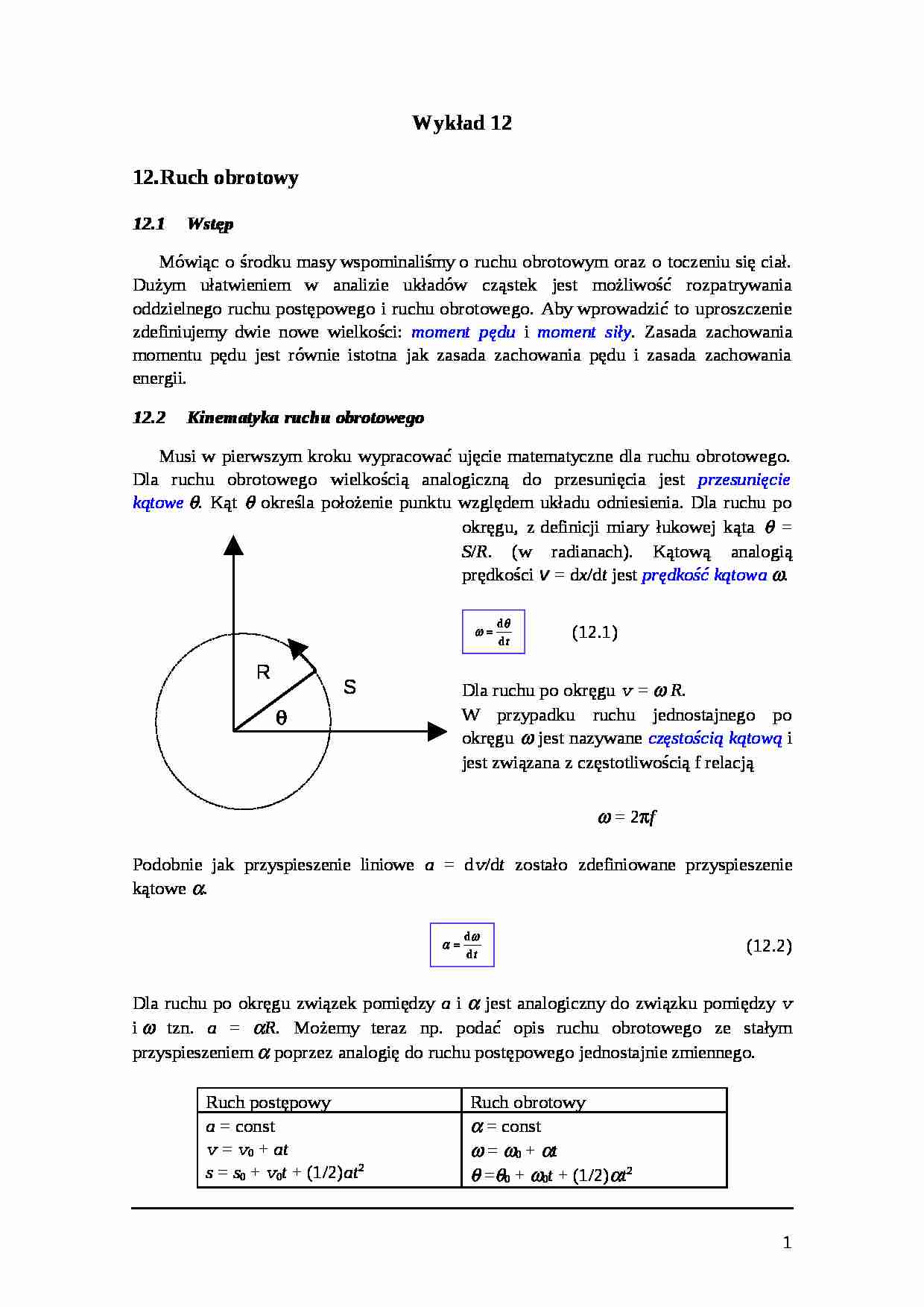
Musi w pierwszym kroku wypracować ujęcie matematyczne dla ruchu obrotowego. Dla ruchu obrotowego wielkością analogiczną do przesunięcia jest przesunięcie kątowe θ. Kąt θ określa położenie punktu względem układu odniesienia. Dla ruchu po okręgu, z definicji miary łukowej kąta θ = S/R. (w radianach). Kątową analogią prędkości v = dx/dt jest prędkość kątowa ω.
(12.1)
Dla ruchu po okręgu v = ω R.
W przypadku ruchu jednostajnego po okręgu ω jest nazywane częstością kątową i jest związana z częstotliwością f relacją
ω = 2πf
Podobnie jak przyspieszenie liniowe a = dv/dt zostało zdefiniowane przyspieszenie kątowe α.
(12.2)
Dla ruchu po okręgu związek pomiędzy a i α jest analogiczny do związku pomiędzy v i ω tzn. a = αR. Możemy teraz np. podać opis ruchu obrotowego ze stałym przyspieszeniem α poprzez analogię do ruchu postępowego jednostajnie zmiennego.
Ruch postępowy
Ruch obrotowy
a = const
v = v0 + at
s = s0 + v0t + (1/2)at2
α = const
ω = ω0 + αt
θ =θ0 + ω0t + (1/2)αt2
Kierunek i zwrot wektorów prędkości kątowej i przyspieszenia kątowego w ruchu obrotowym są pokazane na rysunku poniżej.
Dynamika ruchu obrotowego
Moment siły
W ruchu postępowym siłę wiążemy z liniowym przyspieszeniem ciała. Jaką wielkość będziemy wiązać z przyspieszeniem kątowym?
Nie może być to tylko siła bo jak pokazuje doświadczenie np. z otwieraniem drzwi przyspieszenie kątowe zależy od tego gdzie i pod jakim kątem jest przyłożona siła. W szczególności siła przyłożona w miejscu zawiasów zarówno wzdłuż jak i prostopadle do nich nie wytwarza żadnego przyspieszenia. Natomiast siła przyłożona do drzwi na ich zewnętrznej krawędzi i pod kątem prostym nadaje im maksymalne przyspieszenie.
Dla ruchu obrotowego odpowiednikiem siły w ruchu postępowym jest moment siły (tzw. moment obrotowy) τ.
Jeżeli siła F działa na cząstkę to moment siły jest definiowany jako
(12.3)
gdzie wektor r reprezentuje położenie cząstki względem wybranego inercjalnego układu odniesienia. Moment siły jest wielkością wektorową, której wartość bezwzględna wynosi: τ = rFsinθ (iloczyn wektorowy). Wielkość r nazywamy ramieniem siły (widać, że bierzemy albo
... zobacz całą notatkę
Komentarze użytkowników (0)