To tylko jedna z 3 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę


Rodzaje i cele korekcji
Korekcja układów regulacji obejmuje dwa zagadnienia:
poprawę własności dynamicznych,
poprawę własności statycznych.
Oba te cele mogą być osiągane różnymi drogami; bądź przez zmianę wartości parametrów bloków wchodzących w skład układu regulacji, bądź przez wprowadzenie do układu nowych bloków, zwanych członami korekcyjnymi lub regulatorami* i umieszczenie ich w odpowiednim miejscu układu.
Poprzez poprawę własności statycznych rozumiemy zmniejszenie uchybu ustalonego przy wymuszeniu odpowiedniego typu. Osiąga się to przez wprowadzenie członu korekcyjnego; - często wystarcza człon proporcjonalny (wzmacniacz) włączony szeregowo w tor główny układu. Poprawa własności dynamicznych polega na zapewnieniu żądanego kształtu przebiegu przejściowego reprezentowanego przez takie parametry jak
przeregulowanie, czas regulacji i inne. Obliczenia analityczne są jednak skomplikowane zwłaszcza gdy modelem jest równanie różniczkowe wysokiego rzędu. Powstały jednakże metody projektowania które upraszczają proces projektowania. Ze względu na sposób włączenia elementu korekcyjnego w układ regulacji automatycznej można podstawowe rodzaje korekcji zdefiniować jako korekcję:
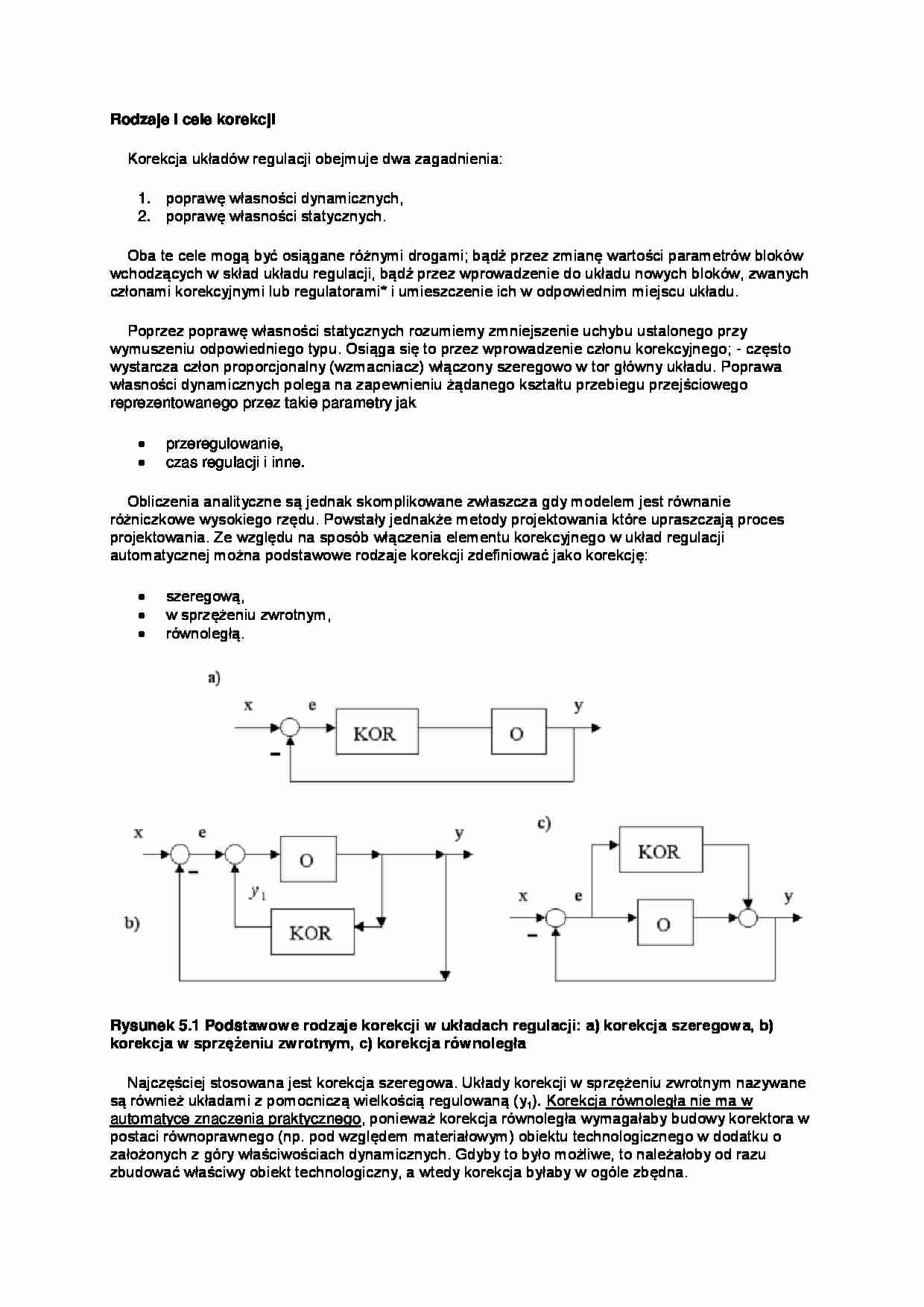
szeregową, w sprzężeniu zwrotnym, równoległą. Rysunek 5.1 Podstawowe rodzaje korekcji w układach regulacji: a) korekcja szeregowa, b) korekcja w sprzężeniu zwrotnym, c) korekcja równoległa
Najczęściej stosowana jest korekcja szeregowa. Układy korekcji w sprzężeniu zwrotnym nazywane są również układami z pomocniczą wielkością regulowaną (y1). Korekcja równoległa nie ma w automatyce znaczenia praktycznego, ponieważ korekcja równoległa wymagałaby budowy korektora w postaci równoprawnego (np. pod względem materiałowym) obiektu technologicznego w dodatku o założonych z góry właściwościach dynamicznych. Gdyby to było możliwe, to należałoby od razu zbudować właściwy obiekt technologiczny, a wtedy korekcja byłaby w ogóle zbędna.
Charakterystyki czasowe i wskaźniki jakości
W rozdziale drugim mówiliśmy o reprezentacjach obiektu. Dla przypomnienia powtórzmy, co będziemy nazywali charakterystyką czasową;
-charakterystyka czasowa - graficzne lub analityczne przedstawienie przebiegu czasowego odpowiedzi układu na określony sygnał wejściowy. Podstawowymi charakterystykami czasowymi dla układów liniowych są: odpowiedź impulsowa oraz odpowiedź na skok jednostkowy. Znajomość charakterystyk czasowych układu umożliwia ocenę jakości sterowania na podstawie odczytanych wskaźników.
Z uwagi na to, iż przebieg przejściowy może mieć różny charakter powstała gama wskaźników jakości. Wybór wskaźnika będzie różny w zależności od celów stawianych układowi regulacji. Dlatego należy mówić o układzie regulacji, że jest optymalny (lub najlepszy) ze względu na dany wskaźnik.
(…)
… uchybu regulacji powstającego na skutek działania zakłóceń na obiekt regulacji lub na skutek zmian sygnału zadanego. Chodzi tutaj o minimalizację uchybu zarówno w stanach ustalonych (uchyb ustalony), jak i przejściowych (przeregulowanie, czas ustalania). Uchyb e(t) zależy od sygnału zadanego r(t), od sygnału zakłóceń z(t), od struktury i parametrów regulatora oraz obiektu regulacji. Badanie jakości…
… czasowych
- czas narastania - praktycznie przyjmuje się, że jest to czas potrzebny do wzrostu amplitudy sygnału wyjściowego od 0,1 do 0,9 wartości ustalonej h( ).
- przeregulowanie - maksymalna odchyłka hmaxwielkości regulowanej od jej wartości ustalonej h( ) wyrażona w jednostkach względnych:
Najczęściej rozpatruje się przeregulowanie w układach stabilnych analizując odpowiedź układu na wymuszenie…
... zobacz całą notatkę
Komentarze użytkowników (0)