To tylko jedna z 3 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę
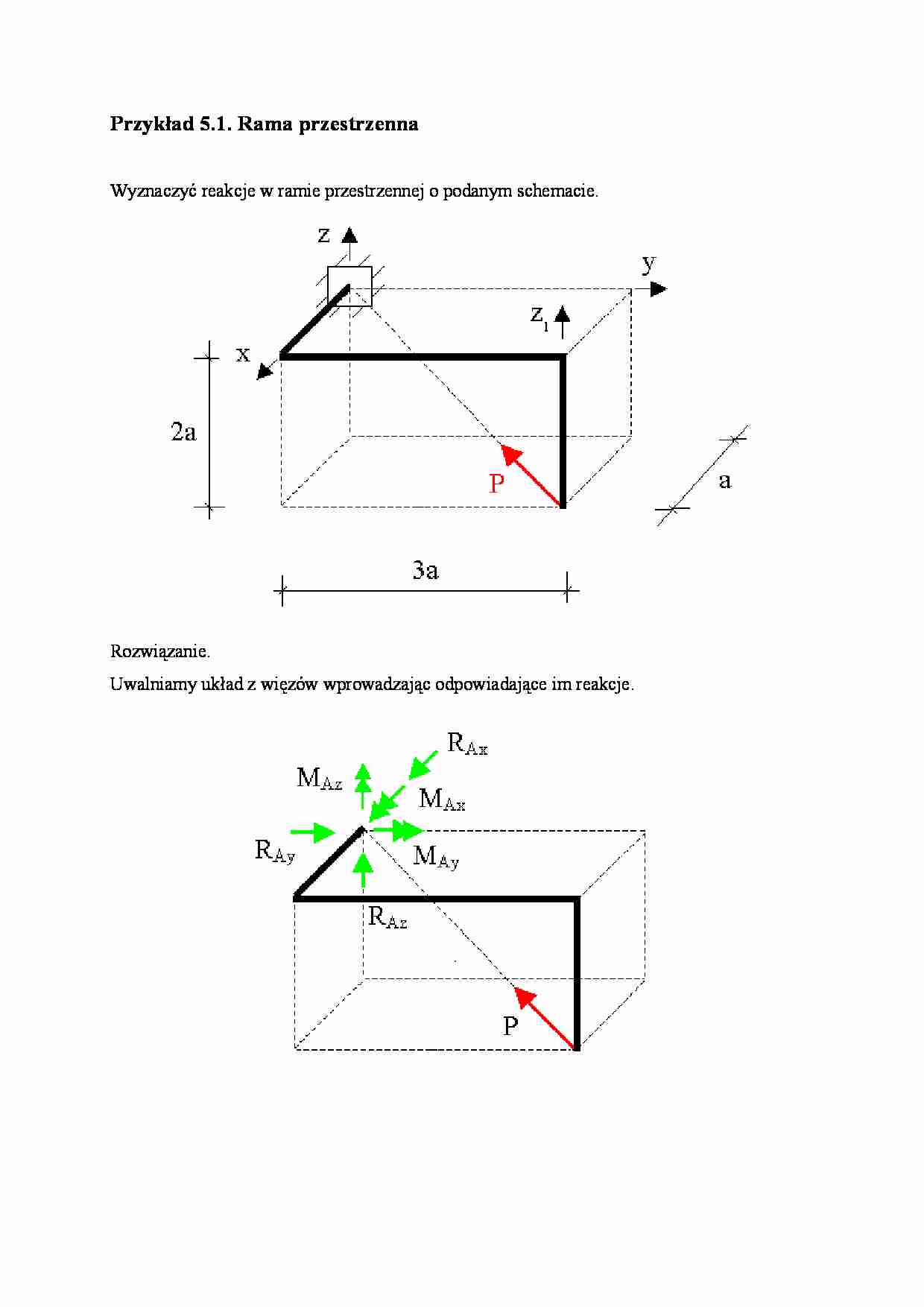


Przykład 5.1. Rama przestrzenna Wyznaczyć reakcje w ramie przestrzennej o podanym schemacie. Rozwiązanie. Uwalniamy układ z więzów wprowadzając odpowiadające im reakcje. 2 W przekroju A pręta występuje zamocowanie sztywne. Nie znamy sześciu reakcji: RAx, RAy, RAz,, MAx , MAy i MAz . Dla przedstawionej ramy można zapisać sześć warunków równowagi. Zatem układ jest statycznie wyznaczalny. Oznaczmy kąty, jakie tworzy linia działania siły P (kierunek siły pokrywa się z przekątną prostopadłościanu) z dodatnimi kierunkami osi x, y i z odpowiednio przez γ β α , , . Cosinusy kierunkowe wynoszą odpowiednio 14 1 14 cos = = a a α 14 3 14 3 cos = = a a β 14 2 14 2 cos = = a a γ gdzie: a, 3a i 2a - wymiary boków prostopadłościanu o kierunku osi x, y i z odpowiednio, a 14 - przekątna prostopadłościanu. Rozłóżmy siłę P na składowe odpowiadające osiom x, y i z. 14 1 cos P P P x = = α 14 3 cos P P P y = = β 14 2 cos P P P z = = γ 14 a 3 Dowolny przestrzenny układ sił i P znajduje się w równowadze, jeżeli sumy rzutów wszystkich sił na trzy osie układu są równe zeru i sumy momentów wszystkich sił względem trzech osi układu są równe zeru: ∑ ∑ ∑ = = = 0 , 0 , 0 iz iy ix P P P ∑ ∑ ∑ = = = 0 , 0 , 0 iz iy ix M M M Linia działania siły P przechodzi przez punkt A. Zatem moment siły P względem punktu A jest równy zeru. Rzuty tego wektora na osie x, y i z (czyli momenty siły P względem osi x, y i z ) tzn. momenty: MAx, MAy i MAz też są równe zero. Pozostają do znalezienia nieznane reakcje RAx, RAy i RAz. Zapisujemy warunki równowagi. 0 = ∑ ix P 0 14 1 = + − Ax R P → 14 1 P R Ax = 0 = ∑ iy P 0 14 3 = + − Ay R P → 14 3 P R Ay = 0 = ∑ iz P 0 14 2 = + Az R P → 14 2 P R Az − = Znak minus oznacza, że zwrot wektora siły RAz jest przeciwny do założonego. Momentowe warunki równowagi są spełnione tożsamościowo. W celu sprawdzenia poprawności obliczeń korzystamy z warunku równowagi, z którego nie korzystaliśmy poprzednio 0 1 = ∑ iz M 0 3 = ⋅ + ⋅ − a R a R Ax Ay → 0 14 3 14 3 = + − P a P Odp. 14 1 P 14 3 P 14 2 P
... zobacz całą notatkę
Komentarze użytkowników (0)