

Fragment notatki:
2.
Metody opisu ruchu płynu
Opis przepływu wymaga znajomości sposobu, w jaki własności płynu takie jak
prędkość, gęstość czy ciśnienie zmieniają się w przestrzeni i w czasie.
W klasycznej mechanice ciała stałego zajmujemy się śledzeniem trajektorii danego układu
materialnego podczas gdy w mechanice płynów koncentrujemy się raczej na uzyskaniu
informacji o wartościach interesujących nas parametrów w danym punkcie przestrzeni czy w
określonej chwili t . Istnieją jednak takie przepływy, dla których konieczna jest także
znajomość trajektorii elementów płynu, czego przykładem może być analiza procesu
rozprzestrzeniania się zanieczyszczeń. Opis trajektorii elementów płynu oraz uzyskanie
informacji o przestrzenno-czasowej zmienności charakterystyk przepływu wymaga
zastosowania różnych metod analizy, znanych jako opis Lagrange’a i Eulera.
2.1.
Metoda Lagrange’a opisu ruchu płynu
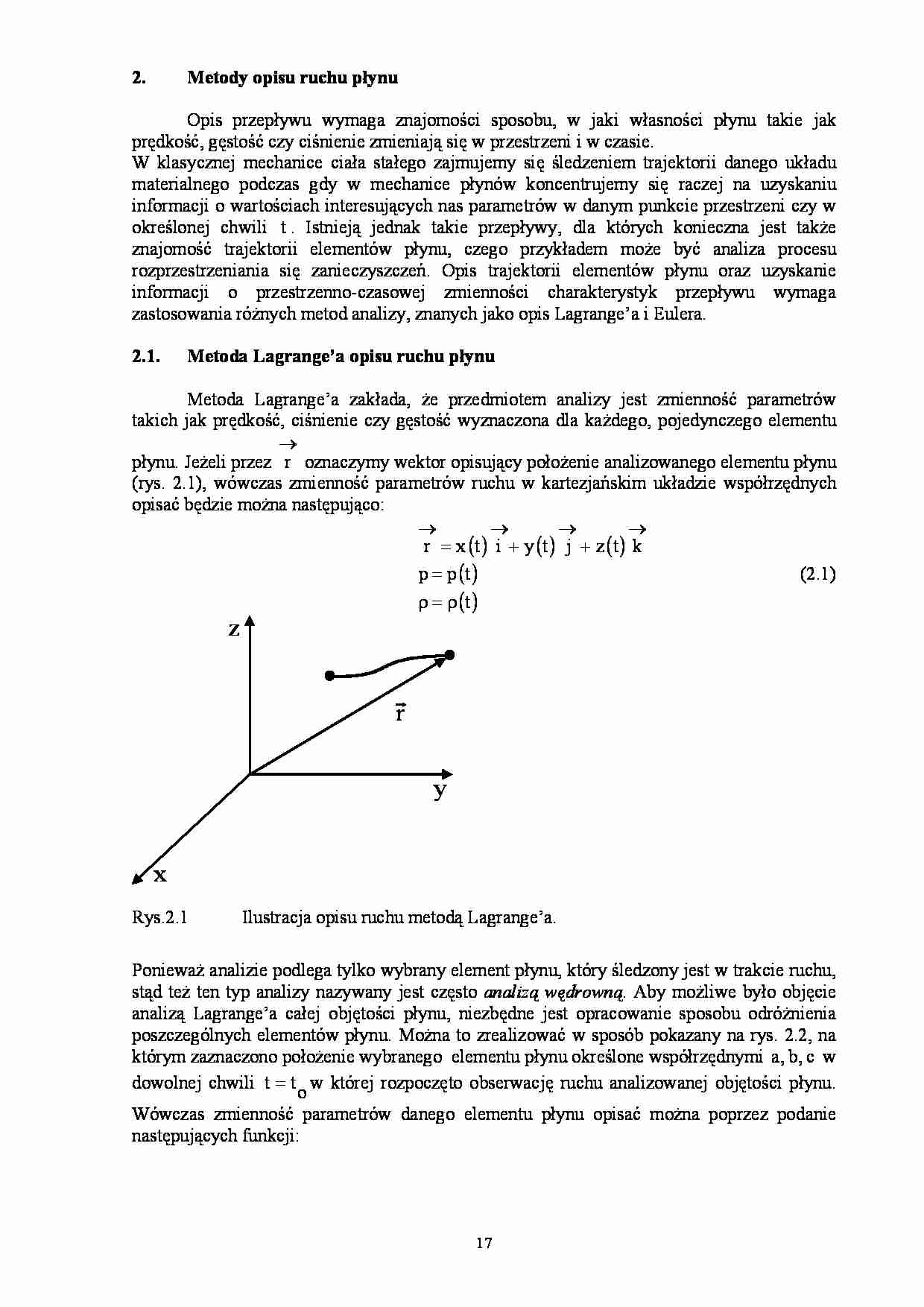
Metoda Lagrange’a zakłada, że przedmiotem analizy jest zmienność parametrów
takich jak prędkość, ciśnienie czy gęstość wyznaczona dla każdego, pojedynczego elementu
→
płynu. Jeżeli przez r oznaczymy wektor opisujący położenie analizowanego elementu płynu
(rys. 2.1), wówczas zmienność parametrów ruchu w kartezjańskim układzie współrzędnych
opisać będzie można następująco:
→
→
→
→
r = x (t ) i + y (t ) j + z (t ) k
p = p (t )
(2.1)
ρ = ρ (t )
z
r
y
x
Rys.2.1
Ilustracja opisu ruchu metodą Lagrange’a.
Ponieważ analizie podlega tylko wybrany element płynu, który śledzony jest w trakcie ruchu,
stąd też ten typ analizy nazywany jest często analizą wędrowną. Aby możliwe było objęcie
analizą Lagrange’a całej objętości płynu, niezbędne jest opracowanie sposobu odróżnienia
poszczególnych elementów płynu. Można to zrealizować w sposób pokazany na rys. 2.2, na
którym zaznaczono położenie wybranego elementu płynu określone współrzędnymi a , b, c w
dowolnej chwili t = t w której rozpoczęto obserwację ruchu analizowanej objętości płynu.
o
Wówczas zmienność parametrów danego elementu płynu opisać można poprzez podanie
następujących funkcji:
17
x (t ) = F (a , b, c, t )
1
y (t ) = F2 (a , b, c, t )
z (t ) = F3 (a , b, c, t )
(2.2)
p (t ) = F4 (a , b, c, t )
ρ (t ) = F5 (a , b, c, t )
w których jedynie czas t jest zmienną a wielkości a , b, c są parametrami służącymi do
rozróżnienia między sobą poszczególnych elementów płynu. Parametry:
a = x (t o )
b = y (t o )
c = z (t o )
(2.3)
po = p (t o )
ρ = ρ (t o )
o
są warunkami początkowymi, a ponieważ wielkości a , b, c, t są jedynymi zmiennymi
niezależnymi, stąd też są one nazywane zmiennymi Lagrange’a, podczas gdy równania (2.2)
są znane jako równania Lagrange’a.
z
t
t0
tor elementu płynu
c
y
z
a
x
b
x
Rys.2.2.
y
Znaczenie warunków początkowych w metodzie Lagrange’a.
Znając równanie ruchu danego elementu płynu wyznaczyć można jego prędkość i
przyspieszenie w kolejnych chwilach czasu. W tym celu zmienność wektora prędkości
zapisać można jako:
→
→
∂ r
(2.4)
U (t ) =
∂t
lub też jako zmienność składowych wektora prędkości:
∂ F (a , b, c, t )
1
U (t ) =
x
∂t
∂ F2 (a , b, c, t )
U y (t ) =
(2.5)
∂t
∂ F3 (a , b, c, t )
U (t ) =
z
∂t
18
Różniczkując następnie prędkość względem czasu otrzymać możemy przyspieszenie danego
elementu płynu:
→
→
∂U
a =
∂t
oraz rzuty tego wektora na poszczególne osie układu współrzędnych:
∂ 2 F ( a , b, c, t )
1
a (t ) =
x
∂ t2
∂ 2 F2 (a , b, c, t )
(2.6)
a y (t ) =
∂ t2
∂ 2 F3 (a , b, c, t )
a (t ) =
z
∂ t2
Jeżeli wielkości a , b, c będziemy traktować jako stałe przy zmiennym t , wówczas równania
(2.2), (2.5) oraz (2.6) będą przedstawiać zmienność parametrów hydrodynamicznych danego
elementu płynu zachodzącą w trakcie jego ruchu. Możemy również potraktować a , b, c jako
zmienne przy stałym t , i wówczas równania te przedstawiać będą zmienność parametrów
hydrodynamicznych w całej analizowanej objętości płynu w danej chwili t .
2.2.
Eulerowski opis ruchu płynu.
Opis Eulera zakłada, że znane są wartości parametrów hydrodynamicznych w każdym
punkcie przestrzeni w każdej kolejnej chwili czasu. W tym celu, w analizowanym płynie
wydziela się tzw. obszar kontrolny, którego lokalizacja określona jest współrzędnymi x , y, z
jak pokazano na rys. 2.3.
tor
z
dy
dx
dz
y
z
x
x
Rys.2.3.
y
Eulerowski opis ruchu płynu.
W obszarze tym określa się wartości parametrów hydrodynamicznych przepływu w kolejnych
chwilach czasu. Dla zapewnienia niezbędnej dokładności wyznaczanych parametrów obszar
ten winien mieć rozmiary elementarne, czyli jego objętość może być utożsamiana z objętością
elementu płynu. Otrzymane w ten sposób informacje dotyczyć będą zmienności czasowej
parametrów określonych tylko dla jednego punktu przestrzeni, a rozszerzenie ich na cały
19
obszar analizowanego przepływu wymaga zbadania, w jaki sposób wielkości te zmieniają się
gdy punkt obserwacji (elementu płynu) zostanie przemieszczony w inne miejsce.
Zmienność parametrów hydrodynamicznych określona metodą Eulera będzie mogła być
zatem zapisana następująco:
→
→ → d r
U r , t =
dt
→
p = p r , t
(2.7)
→
ρ = ρ r , t
→
gdzie r jest promieniem wyznaczającym lokalizację obszaru kontrolnego.
W kartezjańskim układzie współrzędnych opis pola przepływu wyrazić można następującym
układem równań:
dx
U
=
= f (x, y, z, t )
x
1
dt
dy
= f 2 (x, y, z, t )
dt
dz
Uz =
= f3 (x, y, z, t )
dt
p = f 4 (x, y, z, t )
Uy
=
(2.8)
(x, y, z, t )
5
W równaniach Eulera zmienne x , y, z wyznaczają położenie obszaru kontrolnego a nie
współrzędne elementu płynu w kolejnych chwilach czasu jak było to w metodzie Lagrange’a.
W metodzie Eulera nie wyróżniamy zatem żadnego elementu płynu i dlatego też nie
otrzymujemy równania toru elementu lecz informację o wartościach parametrów przepływu
w danym miejscu. Jest to informacja o charakterze lokalnym i dlatego też metoda Eulera
nazywana jest często analizą lokalną, której wynikiem jest informacja o wartościach
parametrów hydrodynamicznych (prędkość, ciśnienie, gęstość) w danym punkcie przestrzeni
w określonej chwili czasu.
Dla stworzenia równań potrzebna jest jeszcze informacja o przyspieszeniu, którego
doznaje element płynu, który w danej chwili t przepływa przez objętość kontrolną. Ponieważ
wektor prędkości jest funkcją współrzędnych przestrzeni i czasu
→
U (x , y, z, t )
więc przyspieszenie elementu płynu zapisać należy:
→
→
→
→
→
→ d U ∂ U ∂ U dx ∂ U dy ∂ U dz
a =
=
+
+
+
dt
∂t
∂ x dt
∂y dt
∂z dt
co po uwzględnieniu wz. (2.8) daje:
→
→
→
→
→
→ dU ∂U
∂U
∂U
∂U
(2.9)
a =
=
+U
+U
+U
x ∂x
y ∂y
z ∂z
dt
∂t
W wyrażeniu powyższym występuje operator różniczkowania:
→
∂U
∂t
ρ = f
20
który wyraża zmianę prędkości w czasie elementów płynu przepływających przez obszar
kontrolny i ta zmiana nazywana jest pochodną lokalną. Przepływ, w którym pochodne
lokalne są niezerowe nazywany jest niestacjonarnym co oznacza, że prędkość w każdym z
punktów może zmieniać się wraz z upływem czasu. Pozostałe operatory różniczkowe:
→
→
→
∂U
∂U
∂U
U
+U
+U
x ∂x
y ∂y
z ∂z
wyrażają zmianę prędkości gdy element płynu porusza się w przestrzennie niejednorodnym
polu prędkości. Ten zespół operatorów nazywany jest pochodną konwekcyjną i może on
przyjmować wartości niezerowe także i w przepływie ustalonym, jeżeli tylko prędkość
przepływu zmienia się w zależności od współrzędnych przestrzeni. Przykładem
pozwalającym zrozumieć różnicę między pochodną lokalną i konwekcyjną może być
przepływ przez dyfuzor, który przy stałej wartości strumienia masy będzie przepływem
ustalonym i dla którego wartości pochodnych lokalnych będą równe zeru, gdyż w każdym
punkcie dyfuzora prędkość nie będzie zmieniać się z czasem. Jednocześnie element płynu
poruszający się wzdłuż dyfuzora będzie zwalniał co oznacza, że będzie on doznawał
ujemnego przyspieszenia konwekcyjnego. Dla zaznaczenia specjalnego sensu fizycznego
pochodnej czasowej zapisanej w zmiennych Eulera, w mechanice płynów przyjęto używać
specjalnego zapisu:
∂
∂
∂
D ∂
= +U
+U
+U
(2.10
x ∂x
y ∂y
z ∂z
Dt ∂t
D
nazywając operator
pochodną substancjalną. Operator ten może być zastosowany
Dt
zarówno do wielkości wektorowych (prędkość) jak i skalarnych, takich jak ciśnienie czy
gęstość i przykładowo w kartezjańskim układzie współrzędnych pochodne substancjalne
wielkości hydrodynamicznych zapisać można następująco:
∂U x
∂U x
∂U x
DU x ∂U x
a =
=
+U
+U
+U
x
x ∂x
y ∂y
z ∂z
Dt
∂t
DU y ∂U y
∂U y
∂U y
∂U y
a =
=
+U
+U
+U
y
x ∂x
y ∂y
z ∂z
Dt
∂t
DU z ∂ U z
∂ Uz
∂ Uz
∂ Uz
a =
=
(2.11)
+U
+U
+U
z
x ∂x
y ∂y
z ∂z
Dt
∂t
∂p
∂p
∂p
Dp ∂ p
=
+U
+U
+U
z ∂z
y ∂y
x ∂x
Dt ∂ t
∂ρ
∂ρ
Dρ ∂ρ
∂ρ
=
+U
+U
+U
x ∂x
y ∂y
z ∂z
Dt ∂t
w którym występują składowe wektora przyspieszenia:
→
→
→
→
a =a i +a j +a k
x
y
z
Postać (2.11) pochodnych substancjalnych może zostać zapisana w sposób bardziej zwarty z
zastosowaniem operatorów wektorowych:
∂ →
∂ →
∂ →
∇ = grad =
i +
j +
k
∂x
∂y
∂z
co pozwala zapisać
→
→
→ DU ∂U
→
→
a =
=
+ U ⋅ grad U
Dt
∂t
Dp ∂p
(2.12a)
=
+ p ⋅ grad p
Dt ∂t
21
Dρ ∂ρ
=
Dt ∂t
+ ρ ⋅ grad ρ
lub:
→
→
→ DU ∂U
→
→
a =
=
+ ( U ⋅ ∇) U
Dt
∂t
Dp ∂p
(2.12b)
=
+ (p ⋅ ∇) p
Dt ∂t
Dρ ∂ρ
=
+ (ρ ⋅ ∇) ρ
Dt ∂t
W związkach (2.12a) i (2.12b) symbolem ( • ) oznaczono iloczyn skalarny analizowanych
wielkości.
2.3.
Związki między opisem Lagrange’a i Eulera
Opis ruchu płynu uzyskany metodami Lagrange’a i Eulera daje w wyniku nie tylko
różne równania, lecz przede wszystkim równania, które dotyczą odmiennych wielkości. Opis
Lagrange’a daje nam opis drogi elementu płynu (wz. 2.1), który musi zostać odpowiednio
przekształcony dla uzyskania opisu pól prędkości i przyspieszeń. W metodzie Eulera
otrzymujemy natomiast opis pola prędkości (wz. 2.7) a uzyskanie informacji o przyspieszeniu
doznawanym przez element płynu wymaga wprowadzenia pojęcia pochodnej substancjalnej.
Przejście z opisu eulerowskiego do równań Lagrange’a jest możliwe, chociaż w praktyce
wymaga to z reguły dokonania wielu złożonych przekształceń. Zilustrujemy to na przykładzie
pola prędkości, wychodząc z równań (2.8) opisujących składowe prędkości w kartezjańskim
układzie współrzędnych:
dx
U
=
f (x , y, z, t )
x
dt 1
dy
f 2 ( x , y, z , t )
dt
dz
U
f (x , y, z, t )
=
z
dt 3
które po scałkowaniu względem współrzędnych przestrzennych dadzą następujące związki:
Uy
=
= F (C1, C 2 , C3 , t )
1
y = F2 (C1, C 2 , C3 , t )
x
z = F3 (C1, C 2 , C3 , t )
(2.13)
zawierające stałe całkowania C , C , C , których wartości określić można z warunków
1 2 3
początkowych. Jeżeli warunki te przyjmiemy identycznie jak w metodzie Lagrange’a:
C = a
1
= b
C
2
= c
C
3
wówczas zal. (2.13) przyjmie postać identyczną jak wz. (2.2), który przedstawia równanie
ruchu w zmiennych Lagrange’a.
Przejście od równań Lagrange’a do równań Eulera wymaga zróżniczkowania trzech
pierwszych równań (2.2) względem czasu zakładając, że a , b, c są stałe. Otrzymamy w ten
sposób układ równań opisujący pole prędkości, przy czym układ ten zależny będzie od
warunków początkowych. a , b, c . Warunki początkowe możemy wyrazić przez współrzędne
22
x , y, z korzystając w tym celu z równań (2.2) przedstawiających lagrange’owski opis toru
elementu płynu i podstawiając je do równań opisujących pole prędkości otrzymamy
eulerowski opis pola prędkości.
Kolejny istotny problem związany z istnieniem dwóch metod opisu ruchu płynu
dotyczy sensu fizycznego pochodnych liczonych względem czasu. Metoda Lagrange’a
opisuje „historię” ruchu pojedynczego elementu płynu i dlatego też w opisie Lagrange’a
pochodna lokalna jest identyczna z pochodną substancjalną:
∂
D
≡
∂t
Dt
jako, że dotyczą one konkretnego elementu płynu wyróżnionego współrzędnymi (warunkami
początkowymi) a , b, c w chwili będącej umownym początkiem naliczania czasu t . W
metodzie Eulera nie śledzimy historii pojedynczych elementów płynu, ale pamiętać należy, że
eulerowska pochodna konwekcyjna dotyczy zmian prędkości, ciśnienia czy gęstości
konkretnego elementu płynu, który przemieszcza się w jednostce czasu o elementarną drogę
dx, dy, dz wzdłuż każdej z osi współrzędnych.
W znakomitej większości przypadków stosujemy opis Eulera, gdyż w praktyce
interesuje nas informacja o wartości prędkości czy ciśnienia w konkretnym miejscu w
przepływie a nie historia zmian tychże parametrów rejestrowana w trakcie ruchu
pojedynczego elementu płynu. O wyborze metody Eulera decyduje również możliwość
eksperymentalnej weryfikacji otrzymanego przez nas rozwiązania, która rozstrzyga przecież
czy otrzymane przez nas wyniki analizy teoretycznej są poprawne. Typowy sposób pomiaru
prędkości czy ciśnienia to wprowadzenie czujnika pomiarowego w określony punkt
przestrzeni i rejestracja zachodzących w tym punkcie zmian prędkości U( x, y, z, t ) czy
ciśnienia p ( x, y, z, t ) . Możemy zatem powiedzieć, że typowe techniki pomiarowe
dostarczają nam informacji będących eulerowskim opisem pola przepływu. Jeżeli wynik
pomiaru prędkości czy ciśnienia miałby być wyrażony w zmiennych Lagrange’a, wówczas
czujnik musiałby przemieszczać się wraz z płynem, co z pewnością byłoby trudne w
praktycznej realizacji. Taki sposób pomiaru stosowany jest jedynie w badaniach
oceanograficznych w trakcie których pomiary wykonywane są z użyciem pływaków
unoszonych przez prądy.
Różnicę między opisem Lagrange’a i Eulera można wyjaśnić najlepiej odwołując się
do przykładu , który nie jest co prawda związany z mechaniką płynów ale za to dotyczy
problemu, z którym często spotykamy się w praktyce. Przykładem takim jest radarowa
kontrola prędkości samochodu będąca najczęściej spotykaną formą kontaktu kierowcy z
policją. Kontrola ta wykonywana być może z użyciem stacjonarnego radaru, który nadzoruje
pewien odcinek drogi (w mechanice płynów jest to objętość kontrolna) i wysyła impulsy
wyzwalające dla aparatu, fotografującego samochody podróżujące z niedozwoloną
prędkością. Jeżeli wyobrazimy sobie, że radarowy miernik prędkości wysyłać będzie
informacje o prędkości każdego przejeżdżającego samochodu, wówczas taka informacja
będzie Eulerowskim opisem pola prędkości samochodów, ograniczonym do wydzielonego
odcinka kontrolnego. Uzyskanie takiej informacji o ruchu wzdłuż całej drogi wymagałaby
zainstalowania wielu radarów, które pozwoliłyby na podanie opisu takiego jak trzy pierwsze
równania układu (2.8).
Policjant nadzorujący tę samą drogę przy pomocy miernika odległości (np.
laserowego) mógłby wycelować w jeden, konkretny samochód i śledzić jego ruch podając w
ustalonych odstępach czas i odczytaną odległość, tworząc w ten sposób lagrange’owski opis
ruchu samochodu, podany trzema pierwszymi równaniami układu (2.2). Odtworzenie
prędkości poruszającego się samochodu wymagałoby zróżniczkowania drogi względem czasu
w sposób podany we wz. (2.5) ale dla policjanta byłaby to czynność całkowicie uzasadniona
gdyż do ukarania kierowcy potrzebna jest przecież informacja o prędkości kierowanego
przezeń samochodu. Uzyskanie opisu ruchu wszystkich samochodów wymagałoby użycia
wielu policjantów i mierników, a dla rozróżnienia podawanych przez nich czasów i odległości
należałoby wyróżnić informacje pochodzące z różnych mierników np. poprzez podanie
23
współrzędnych początkowych poszczególnych samochodów. Przykład ten pozwala zrozumieć
dlaczego metoda Lagrange’a jest mniej wygodna w praktyce, bo przecież inżynier
rozwiązujący pole przepływu jest zainteresowany dokładnie tą samą informacją co policjant,
gdyż dla obydwu istotna jest znajomość parametrów ruchu w określonych punktach
przestrzeni a nie historia ruchu poszczególnych elementów płynu czy samochodów. Żaden
policjant nie jest przecież zainteresowany informacją, że przekroczyliśmy prędkość tylko w
kontrolowanej strefie a z drugiej strony także i kierowca nie byłby zadowolony gdyby
policjant dysponował pełną znajomością historii jego podróży a zwłaszcza rozwijanej
prędkości.
2.4.
Trajektorie, linie i powierzchnie prądu
Przedmiotem zainteresowania inżyniera zajmującego się mechaniką płynów są
wartości parametrów hydrodynamicznych w określonych punktach przepływu, ale
zrozumienie zachodzących w tymże przepływie zjawisk wymaga także znajomości obrazu
znajomości tego przepływu. Pojęcie to jest łatwe do intuicyjnego zrozumienia i najczęściej
utożsamiamy je z kształtem linii zakreślonych przez drobne cząstki zawiesiny unoszone w
płynie lub przedmioty pływające na powierzchni. Większość płynów jest bowiem
przezroczysta i bezpośrednia obserwacja trajektorii elementów płynu nie jest możliwa i
dlatego też wizualizacja ruchu wymaga wprowadzenia do przepływu specjalnych znaczników
takich jak kolorowe zawiesiny lub barwniki. Problem opisu tak rozumianego obrazu
przepływu jest stosunkowo prosty do rozwiązania, jeżeli stosujemy ujęcie Lagrange’a, w
którym opis drogi elementu płynu jest uzyskiwany bezpośrednio. Zagadnienie komplikuje się
gdy ruch płynu opisujemy metodą Eulera, w której otrzymujemy informację o prędkości
płynu i konieczne jest wprowadzenie dodatkowych zabiegów, które pozwoliłyby na
odtworzenie trajektorii elementów płynu. Dlatego też w kinematycznym opisie ruchu płynu
konieczne jest wprowadzenie co najmniej dwóch pojęć tzn. toru elementu płynu i linii prądu,
których własności i możliwy obszar zastosowań wymagający bardziej szczegółowej dyskusji.
2.4.1. Tor elementu płynu
Pod pojęciem obrazu przepływu rozumiemy trajektorie lub tory elementów płynu,
które są miejscem geometrycznym kolejnych położeń poruszającego się elementu płynu.
Tak rozumiany opis zakreślonej w przestrzeni przez poruszający się element płynu uzyskać
można z równań ruchu (Lagrange’a lub Eulera) eliminując z nich czas t .
Jeżeli równania ruchu wyrażone są w zmiennych Lagrange’a
x (t ) = F (a , b, c, t )
1
y (t ) = F2 (a , b, c, t )
(2.2)
z (t ) = F (a , b, c, t )
3
w których a , b, c są stałymi, to równania te po wyrugowaniu z nich czasu t stają się
równaniami opisującymi tory poszczególnych elementów płynu. Ponieważ czas jest w
metodzie Lagrange’a parametrem równań, stąd też często równania Lagrange’a nazywane są
parametrycznym opisem torów elementów płynu.
W metodzie Eulera w sposób bezpośredni uzyskujemy informacje o przestrzennoczasowej zmienności pola prędkości, które opisane jest następującym układem równań:
24
dx
= f ( x , y, z , t )
1
dt
dy
Uy =
= f 2 ( x , y, z , t )
dt
dz
U
=
= f (x , y, z, t )
3
z
dt
który przekształcić można do postaci:
dx
dy
dz
=
=
= dt
U x (x , y, z, t ) U y (x, y, z, t ) U z (x, y, z, t )
U
x
=
(2.8)
(2.14)
Po scałkowaniu tych równań uzyskamy związki:
x = F (C1, C 2 , C3 , t )
1
y = F2 (C1, C 2 , C3 , t )
z = F3 (C1, C 2 , C3 , t )
(2.13)
zależne od stałych, których wartości mogą być określone z warunków początkowych (patrz
rozdz. 2.3).
Jeżeli z powyższego układu równań wyeliminujemy zmienną t , wówczas otrzymamy
równania toru elementów płynu, które tworzyć będą rodzinę krzywych zależnych od wartości
początkowych.
Wprowadzając pojęcie toru elementu stwierdziliśmy, że najczęściej utożsamiamy je z
linią barwnika lub trajektorią cząstki zawiesiny unoszonej przez przepływ w niektórych
źródłach jako przykład toru elementu płynu podaje się trajektorię dymu wydobywającego się
z komina. Tymczasem ten przykład dotyczy szczególnego przypadku toru elementu tzn. tego,
który przechodzi przez określony punkt w przestrzeni i dlatego w niektórych podręcznikach
(Bukowski, Saberski et al. White) wprowadza się pojęcie linii wysnutej (streakline) dla
zaznaczenia odrębności tego pojęcia.
2.4.2. Linia prądu
Jeżeli pole przepływu opisujemy w zmiennych Eulera, wówczas dysponując
informacją o polu prędkości w każdym punkcie przepływu możemy wprowadzić pojęcie linii
prądu będącej wektorową linią spełniającą warunek styczności do wszystkich wektorów
prędkości elementów płynu położonych na tej linii w danej chwili.
Pojęcie to jest znacznie lepiej dostosowane do specyfiki opisu eulerowskiego, gdyż znane
wektory prędkości będą nam wyznaczać kształt linii prądu, której kierunek będzie w każdej
chwili zgodny z chwilowym kierunkiem przepływu. Jeżeli przepływ będzie ustalony, co
oznacza, że w każdym punkcie przestrzeni wartości i kierunek wektora prędkości będą
niezmienne, wówczas linia prądu będzie tożsama z torem elementu. Dla przepływu
nieustalonego te dwie linie będą identyczne, gdyż linia prądu przedstawia spodziewany
kształt trajektorii elementu płynu dla pola prędkości występującego w danej chwili, zaś tor
elementu płynu to oczekiwana trajektoria, która będzie zakreślona przez tenże element w
miarę rozwijania się (zmian) nieustalonego przepływu.
Opis linii prądu wyprowadzić można z rys. 2.4, na którym kropkami oznaczono dwa
kolejne położenia elementu płynu zarejestrowane w nieskończenie małym odstępie czasu dt
→
wzdłuż linii prądu do której styczne są w każdej chwili wektory prędkości U . W punkcie
→
→
→
wyznaczonym przez wektor r wektor prędkości U i przemieszczenie ∆ r dokonanego w
czasie dt są równoległe, co należy zapisać jako:
→
→
∆ r x U = 0
(2.15)
25
U
U
∆r
r
z
y
x
Rys. 2.4.
Linia prądu.
Rzuty obydwu wektorów na osie układu współrzędnych są równe:
→
→
→
→
∆ r = dx i + dy j + dz k
→
→
→
→
U
= U i + U j + U k
x
y
z
co pozwala zapisać wz. (2.15) będący warunkiem styczności wektora prędkości do linii prądu
jako zerowość następującego wyznacznika:
→ → →
i
j
k
dx dy dz
=
0
U x U y Uz
co po rozwinięciu daje:
→
→
→
i dy U z − U y dz + j (U x dz − U z dx ) + k dx U y − U x dy = 0
(
)
(
)
i dalej:
dy U − U dz = 0
z
y
dz U x − U z dx = 0
− U dy = 0
y
y
Ostatecznie równanie różniczkowe linii prądu przybiera postać:
dx
dy
dz
=
=
=0
U x (x, y, z, t ) U y (x, y, z, t ) U z (x, y, z, t )
dx U
(2.16)
w której składowe prędkości są funkcjami współrzędnych przestrzeni i czasu, co oznacza, że
równanie (2.16) dotyczy przepływu nieustalonego. Dla ruchu ustalonego równanie linii prądu
zapisać można jako:
dx
dy
dz
=
=
=0
(2.17)
U x (x, y, z, ) U y (x, y, z, ) U z (x, y, z, )
co daje postać identyczną jak dla równania toru elementu płynu (wz. (2.14)). W ruchu
ustalonym wzdłuż tej samej linii prądu porusza się nieskończenie wiele elementów płynu,
które zakreślają trajektorię identyczną z torem elementu płynu i linią wysnutą przechodzącą
przez dalszy punkt przestrzeni.
26
Analityczne rozwiązanie równania (2.16), będącego układem dwóch równań
różniczkowych możliwe jest poprzez ich scałkowanie, prowadzące do całki ogólnej danej
również układem dwóch równań:
F (x, y, z, t , C1, C 2 ) = 0
1
(2.18)
F (x, y, z, t , C1, C 2 ) = 0
2
Jeżeli znamy współrzędne punktu M (x o , y o , z o ) przez który w chwili t przechodzi linia
o
o
prądu, wówczas z układu równań (2.18) można wyznaczyć wartości stałych C oraz C ,
1
2
które określają równanie linii prądu, przechodzącej w danej chwili t przez punkt M .
o
o
→
Jeżeli jednak w punkcie M .prędkość U = U równa jest zeru wówczas jednoznaczne
o
wyznaczenie stałych C i C , nie jest możliwe, gdyż punkt M . jest wówczas punktem
2
o
1
osobliwym, przez który może przechodzić nieskończenie wiele linii prądu.
2.4.3. Rurka prądu i włókno prądu
Linia prądu stanowi użyteczne pojęcie w analizie prostych przepływów, które
sprowadzić można do tzw. zagadnień jednowymiarowych. Załóżmy, że przez każdy punkt
zamkniętego konturu otaczającego nieskończenie małe pole dS pokazane na rys. 2.5
poprowadzimy linie prądu, które utworzą powierzchnię zwaną rurką prądu. Jednocześnie
linie prądu przeprowadzić można przez każdy punkt powierzchni dS i taki zbiór linii prądu
nazywamy włóknem prądu. Jeżeli płyn przepływać będzie przez powierzchnię dS w ruchu
nieustalonym, wówczas kształt obydwu tych zbiorów będzie zmieniał się i wówczas
będziemy mogli mówić o chwilowej rurce prądu i chwilowym włóknie prądu. Jeżeli będzie to
przepływ ustalony, wówczas zarówno kształt rurki jak i włókna prądu będzie niezmienny w
czasie i co najważniejsze, zbiory te będą wykazywać własności zbliżone do przepływu w
sztywnej rurce. Żadna bowiem linia prądu będąca częścią składową włókna prądu nie będzie
mogła przebić rurki prądu, na której to powierzchni utworzonej z linii prądu będą mogły
istnieć jedynie składowe styczne prędkości (patrz rys. 2.5). Żaden zatem element płynu, który
znalazł się wewnątrz rurki prądu nie może jej opuścić, jeżeli tylko rozpatrywany przepływ
jest ustalony (w przepływie nieustalonym zmienny w czasie kształt rurki prądu może w
każdej chwili obejmować inne elementy płynu niż te, które były wewnątrz w chwili
poprzedzającej). W bardzo uproszczonej analizie, włóknem prądu może być np. przepływ w
kanale czy rurze, których ściany mogą być odwzorowane powierzchnią rurki prądu. W tym
jednak przypadku musimy zaniedbać zmienność prędkości w poprzecznym przekroju włókna
prądu, przyjmując średnią wartość prędkości w całym poprzecznym przekroju dS . Prędkość
będzie mogła wówczas zmieniać się tylko wzdłuż długości włókna prądu i stąd nazwa –
zagadnienie jednowymiarowe. Można również cały przekrój poprzeczny kanału podzielić na
znacznie mniejsze włókna prądu co z jednej strony pozwala na uwzględnienie zmienności
prędkości w przekroju poprzecznym kanału, lecz z drugiej strony powoduje to komplikację
opisu przepływu.
27
rurka prądu
ds - przekrój
element
płynu
ścianka rurki prądu
Rys. 2.5.
2.5.
Rurka prądu i włókno prądu.
Warunek ciągłości przepływu
Opis pola przepływu uwzględniać musi oczywisty warunek, aby w analizowanym
układzie masa płynu nie mogła ginąć ani też nie mogła pojawiać się nowa masa. Najłatwiej
wyrazić ten warunek dla przepływu zachodzącego we włóknie prądu, w którym przez każdy
kolejny przekrój poprzeczny przepływać musi w jednostce czasu taka sama masa płynu. Jeżeli
przez S oznaczymy pole przekroju włókna, a przez U średnią prędkość przepływu,
wówczas w każdym dowolnym przekroju włókna spełniony być musi warunek:
•
ρ ⋅ S ⋅ U = m = idem
(2.19)
•
w którym m oznacza strumień masy.
Warunek ten musi być spełniony wzdłuż całej długości włókna prądu, co oznacza z kolei, że
dla przepływu ustalonego (dla którego kształt włókna prądu jest niezmienny w czasie) włókno
prądu nie może się nigdzie kończyć ani zaczynać. Jeżeli rozpatrywana przestrzeń płynu jest
ograniczona, wówczas włókno prądu musi rozciągać się od jednej granicy do drugiej,
28
natomiast w przestrzeni nieograniczonej musi mieć ono długość nieskończoną. Warunek
(2.19) nazywany równaniem ciągłości dla włókna prądu będzie również spełniony, jeżeli
włókno będzie zamknięte. Jeżeli rozpatrywany przepływ będzie ściśliwy, wówczas z samego
tylko warunku (2.19) nie będzie można obliczyć prędkości, gdyż w przepływie ściśliwym
gęstość płynu zależy od ciśnienia.
Dla przepływów płynów nieściśliwych ( ρ = idem) warunek (2.19) daje się uprościć
do postaci:
•
S ⋅ U = Q = idem
(2.20)
•
czyli do warunku stałości strumienia objętości Q , której wymiar wynosi:
•
Q [m3/s]
Warunek ciągłości (2.20) jest szczególnie przydatny w przepływach, które mogą być
rozpatrywane jako jedno włókno prądu, co pokazano schematycznie na rys. 2.6. Przez
przekrój S w jednostce czasu dt przepływa strumień objętości:
1
•
S ⋅ dl = S ⋅ U ⋅ dt = Q
1 1
1 1
i w przypadku przepływu nieściśliwego identyczny strumień objętości przepływać musi przez
przekrój S :
2
•
S ⋅ dl
= S ⋅ U ⋅ dt = Q
2 2
2 2
S1
U1
S2
U2
dl1
dl2
Rys.2.6.
Warunek ciągłości dla włókna prądu.
Jeżeli zatem przekroje włókna prądu są tożsame z przekrojami całego przeplywu i jeżeli
znany jest strumień objętości takiego przepływu, wówczas średnią prędkość przepływu dla
każdego przekroju S wyliczyć można z warunku (2.20):
i
•
S ⋅ U = Q
i
i
29
Związki (2.19) i (2.20) wystarczają do opisu warunków zachowania masy i objętości
ustalonych i nieściśliwych przepływów jednowymiarowych, którym to wymiarem będzie dla
włókna prądu odległość od przekroju początkowego, mierzona wzdłuż osi włókna prądu. Nie
wszystkie jednak przepływy są aż tak prostymi przypadkami i dlatego też koniecznym jest
sformułowanie warunku zachowania masy dla przypadku najbardziej ogólnego tzn. dla
przepływu nieustalonego, ściśliwego i trójwymiarowego.
Zastosujemy metodę Eulera, wybierając do analizy elementarną objętość w kształcie
prostopadłościanu o wymiarach dx, dy, dz krawędzi równoległych do osi kartezjańskiego
układu współrzędnych, jak pokazano na rys. 2.7. Przepływ jest nieustalony i ściśliwy co
→
oznacza, że jego parametry hydrodynamiczne tzn. prędkość U , ciśnienie p i gęstość ρ są
funkcjami czasu i współrzędnych przestrzeni:
→
→
U = U ( x , y, z , t )
p = p ( x , y, z , t )
ρ = ρ ( x , y, z , t )
ρUz+
dx
(ρUz )
z dz
ρUx
dy
ρUy+
ρUy
(ρUy )
y dy
dz
z
ρUx+
x
Rys.2.7.
(ρUx )
x dx
ρUz
y
Bilans masy w elementarnej objętości.
Ponieważ jest to pierwsze, praktyczne zastosowanie metody Eulera w analizie ruchu płynu,
stąd też przyjrzyjmy się bliżej podstawowym założeniom tej metody. Objętość kontrolna
została ulokowana w dowolnym ale ściśle określonym położeniu i w objętości tej rejestrować
będziemy zmienność parametrów hydrodynamicznych przepływu. Objętość kontrolna nie
może zakłócać przepływu i dlatego też możemy ją sobie wyobrazić jako klatkę wykonaną z
nieskończenie cienkich drutów, wyznaczającą granice nadzorowanego przez nas obszaru.
Kolejny problem wart rozważenia, to sposób sformułowania warunku zachowania masy w
objętości kontrolnej w przypadku, gdy parametry hydrodynamiczne są funkcjami czasu i
współrzędnych przestrzeni. Wydawać by się mogło, że warunek zachowania masy w
metodzie Eulera należy sformułować jako żądanie, aby masa objętości kontrolnej była
niezmienna w czasie. Jeżeli jednak prędkość i gęstość płynu opuszczającego objętość
kontrolną będą różne od wartości tychże parametrów dla płynu wchodzącego do
nadzorowanej objętości, wówczas masa zawarta w prostopadłościanie z rys. 2.7 będzie
zmieniać się w czasie. Można tu przywołać analogię ze zbiornikiem, w którym zawarta jest
30
pewna objętość płynu i jeżeli tylko zbiornik jest szczelny, wówczas warunek zachowania
masy sprowadzi się do niezmienności masy płynu zawartej w tym zbiorniku. Jeżeli jednak
zacznie się wypływ, wówczas warunek zachowania masy wymagać będzie uwzględnienia nie
tylko płynu znajdującego się w zbiorniku, lecz także i tej masy, która z niego wypływa. W
metodzie Eulera warunek zachowania masy należy zatem sformułować następująco:
zmiana masy
w objętości
kontrolnej
różnica mas wpływających
i wypływających z
objętości kontrolnej
=
→
Załóżmy, że wektor prędkości U o składowych
→
→
→
→
U = U i +U j +U k
x
y
z
jest skierowany w taki sposób, że płyn wchodzi do objętości kontrolnej przez powierzchnie
bliższe początkowi układu współrzędnych, którymi na rys. 2.7 są prostokąty zaznaczone
liniami przerywanymi. Rozpatrzmy oddzielnie strumienie masy wpływające do objętości
kontrolnej w kierunkach zgodnych ze zwrotem osi układu współrzędnych. W kierunku osi x ,
przez prostokąt o polu dydz w jednostce czasu dt wpływa masa:
ρ U dydz dt
x
a po uwzględnieniu strumieni masy wpływających wzdłuż wszystkich osi otrzymujemy:
•
m wpł = ρ U x dydz + ρ U y dxdz + ρ U z dxdy dt
(2.21)
Jeżeli jednostkowy strumień masy wpływającej wzdłuż osi x przypadający na jednostkę
powierzchni i czasu wynosi:
(ρ U x )
to jego zmienność wzdłuż osi x zachodząca na skutek zmian gęstości i prędkości wynosić
będzie:
∂ (ρ U x )
∂x
Przyrost jednostkowego strumienia masy na powierzchni wypływającej wynosić będzie:
∂ (ρ U x )
dx
∂x
(
)
co po pomnożeniu przez pole powierzchni i czas obserwacji i dodaniu strumienia masy
wpływającego do objętości kontrolnej da strumienie masy wypływającej:
wzdłuż osi x:
∂ (ρ U x )
(2.22a)
dx dy dz dt
(ρ U x ) +
∂x
wzdłuż osi y:
∂ ρ Uy
dy dx dz dt
(2.22b)
(ρ U y ) +
∂y
wzdłuż osi z:
∂ (ρ U z )
(2.22c)
(ρ U z ) + ∂z dz dx dy dt
Różnica strumieni masy wypływającej i wpływającej wynosi:
•
•
•
∆ m = m wypł - m wpł
po zsumowaniu związków (2.22a ÷ c) i odjęciu wz. (2.21) pozwala zapisać:
(
31
)
(
)
• ∂ (ρU ) ∂ ρU y
∂ (ρU z )
x +
∆m =
+
(2.23)
dxdydz dt
∂y
∂z
∂x
i różnica ta musi być równa zmianie masy płynu zawartego w objętości kontrolnej. Jeżeli
pierwotna masa zawarta w objętości kontrolnej wynosiła
ρ dx dy dz
to na skutek różnicy mas wypływającej i wpływającej malała ona w tempie:
∂ρ
∂ (ρ dxdydz)
=−
dxdydz
−
∂t
∂t
i po czasie dt zmiana masy w objętości kontrolnej wyniesie:
∂ρ
−
dxdydz dt
∂t
Zmiana masy w objętości kontrolnej równa być musi różnicy mas wpływającej i
wypływającej:
•
∂ρ
−
dx dy dz dt = ∆ m
∂t
i po uwzględnieniu wz. (2.23) zapisać można:
∂ρ ∂ (ρ U x ) ∂ ρU y ∂ (ρU z )
+
−
=
+
∂y
∂z
∂t
∂x
Podstawiając do powyższego równania związki:
∂ (ρU x )
∂U x
∂ρ
=ρ
+ U
x ∂x
∂x
∂x
(
(
∂ ρU y
∂y
) = ρ ∂U y
∂y
∂ (ρU z )
∂U z
=ρ
∂z
∂z
+
U
∂ρ
y ∂y
+
U
)
∂ρ
z ∂z
oraz uwzględniając wyrażenie opisujące pochodną substancjalną gęstości:
Dρ ∂ρ
∂ρ
∂ρ
∂ρ
=
+U
+U
+U
x ∂x
y ∂y
z ∂z
Dt ∂t
otrzymujemy ostateczną postać warunku zachowania masy, nazywanego równaniem ciągłości
nieustalonego przepływu płynu ściśliwego
1 Dρ ∂U x ∂U y ∂U z
+
=0
+
+
(2.24)
∂y
∂z
ρ Dt
∂x
lub w zapisie wektorowym:
→
1 Dρ
+ div U = 0
(2.24a)
ρ Dt
Dla ruchu ustalonego płynu ściśliwego zerową wartość przyjmuje pochodna lokalna gęstości:
∂ρ
= 0
∂t
i równanie ciągłości ustalonego ruchu płynu ściśliwego zapisać można:
∂ (ρU z )
∂ (ρU x ) ∂ ρU y
+
= 0
+
(2.25)
∂y
∂z
∂x
lub:
(
)
32
→
div ρ U = 0
(2.25a)
Jeżeli rozpatrywać będziemy ustalony przepływ nieściśliwy, wówczas:
Dρ
= 0
Dt
i równanie ciągłości ustalonego ruchu płynu nieściśliwego przyjmie postać:
∂U x ∂U y ∂U z
+
= 0
+
(2.26)
∂y
∂z
∂x
lub w postaci wektorowej:
→
div U = 0
(2.26a)
Równanie ciągłości musi być spełnione w każdym przepływie i dlatego też opis ruchu płynu
zawierać musi jeden z wyprowadzonych tu warunków (2.24), (2.25) lub (2.26) odpowiedni
dla rozpatrywanego przypadku. Wyprowadzając równanie ciągłości nie czyniliśmy też
jakichkolwiek założeń dotyczących występowania lub braku lepkości i dlatego też równanie
ciągłości obowiązywać będzie zarówno dla przepływów płynów nielepkich jak i lepkich.
2.6.
Opis pola prędkości płynu
Opisując prędkości płynu zakładaliśmy, że jest to prędkość postępowa (liniowa),
podczas gdy w ogólnym przypadku pole prędkości może być znacznie bardziej złożone.
Przykładowo, dowolne ciało może poruszać się ruchem postępowym, wykonując
jednocześnie ruch obrotowy wokół punktu M , którego chwilowe położenie wyznacza
o
→
wektor ro pokazany na rys. 2.8.
ω x r'
ω
z
M
r' = r - r0
U0
r
M0
U0
r0
y
x
Rys.2.8.
Pole prędkości w elemencie płynu.
33
W takim przypadku wektor prędkości dowolnego punktu M układu materialnego, którego
→
położenie wyznacza wektor r , może być przedstawiony jako suma prędkości postępowej
→
U o bieguna oraz prędkości liniowej ruchu obrotowego
→
→
ω x r'
→
gdzie ω jest prędkością kątową z jaką ciało obraca się wokół osi przechodzącej przez
→
biegun. Wektor r ' zaznaczony na rys. 2.8 i równy
→
→
→
r' = r − r o
jest promieniem – wektorem łączącym biegun z analizowanym punktem M . W ciele
sztywnym wektor prędkości dowolnego punktu zapisać zatem można jako:
→
→
→
→
U szt = U o + ω x r '
(2.27)
a warunek sztywności ciała przybiera wówczas postać:
→
(2.28)
r ' = idem
Jeżeli rozpatrywać będziemy pole prędkości płynu, wówczas odległość punktów M i M
o
będzie mogła się zmieniać, tzn.
→
r ' = var
i wówczas wektor prędkości w punkcie M dany związkiem:
→ → →
→
→
→
→
(2.29)
U = U r o + r ' = U i + U j + U k
x
y
z
będzie złożeniem prędkości postępowej bieguna:
→
→
→
→
→ →
(2.29a)
Uo = U r o = U
i +U
j +U k
xo
yo
zo
oraz prędkości pochodzącej od obrotu i deformacji elementu płynu. Jeżeli punkt M położony
jest blisko bieguna M wówczas wykorzystać można rozwinięcie w szereg Taylora, które dla
o
→
wielkości wektorowej a analitycznej (tzn. wielokrotnie różniczkowalnej) wokół punktu t ,
→
pozwala wyznaczyć wartość tej funkcji w punkcie odległym o h od punktu t w sposób
następujący:
→
→
→
→
h d a
h2 d2 a
a (t + h ) = a (t ) +
+
+
+ ...
2
1! dt
2!
dt
Pole prędkości w punkcie M zapisać zatem możemy jako następujące rozwinięcie pola
prędkości w otoczeniu bieguna:
→ →
r − r o
→ →
→ → → → r − r
→ →
→
o ∇U r +
∇ 2 U r + ...
r = U r o+
U
1!
2!
a po uwzględnieniu wzoru (2.29a):
34
→ →
r − r o
→ →
→ → →
→ →
→
r −ro
∇ 2 U r + ...
U r = Uo +
∇U r +
1!
2!
gdzie:
∂ → ∂ → ∂ →
∇=
i +
j +
k
∂x
∂z
∂y
Prędkość płynu w punkcie M zapisać możemy jako układ trzech równań dla rzutów wektora
→ →
prędkości U r na osie kartezjańskiego układu współrzędnych:
∂U
∂U
∂U
U = U + (x − x o ) x + (y − y o ) x + (z − z o ) x +
∂y
x
xo
∂z o
∂x o
o
(x − x o )2
+
z!
∂2 U
x + ...
∂ 2
x o
∂U y
∂U y
∂U y
+ ( y − y o )
+ (z − z o )
U = U + (x − x o )
∂x
∂y
∂z +
y
yo
o
o
o
+
(x − x o )2 ∂ 2 U y
z!
+ ...
∂x 2
o
∂U
∂U
∂U
U = U + (x − x o ) z + (y − y o ) z + (z − z o ) z +
∂y
z
zo
∂x o
∂z o
o
+
gdzie indeks
(x − x o )2 ∂ 2 U z
( )o
z!
2
∂x o
+ ...
oznacza, że wartość pochodnej określona jest w punkcie M . Jeżeli
o
element płynu stanowiący otoczenie punktu M będzie dostatecznie mały, wówczas różnice
o
(x − x o ), (y − yo ), (z − z o ) będą na tyle małe, że będzie można pominąć wyrazy rzędu
drugiego i wyższych i pole prędkości płynu w punkcie M opisane będzie przez następujące
zależności:
∂U
∂U
U = U + (x − x o ) x + (y − y o ) x
∂y
x
xo
∂x o
∂U
+ (z − z o ) x
∂z
o
o
∂U y
∂U y
∂U y
+ (z − z o )
+ ( y − y o )
U = U + (x − x o )
∂z
∂y
∂x
y
yo
o
o
o
∂U
∂U
∂U
U = U + (x − x o ) z + (y − y o ) z + (z − z o ) z
∂y
z
zo
∂x o
∂z o
o
35
(2.30)
Zależności powyższe wskazują, że prędkość dowolnego punktu M znajdującego się w
elemencie otaczającym
punkt
M
jest liniową funkcją współrzędnych
o
(x − x o ), (y − yo ), (z − z o ) określających odległość punktu M od punktu M o . Pole
prędkości dla którego rzuty prędkości w dowolnym punkcie są liniowymi funkcjami
współrzędnych tego punktu nazywane jest polem jednorodnego odkształcenia. Zależność
(2.30) została wyprowadzona dla płynu, w którym pole prędkości jest sumą następujących
części składowych:
prędkości postępowej
prędkości liniowej obrotu
prędkości deformacji (nie narzucaliśmy tutaj warunku sztywności (2.28)).
Jeżeli od poszczególnych składowych prędkości ze wz. (2.30) odejmiemy składowe pola
prędkości ciała sztywnego (które jest sumą prędkości postępowej i obrotu) otrzymamy
wówczas składowe prędkości deformacji, co zapisać można następująco:
U
=U −U
x def
x
x szt
U
=U −U
(2.31)
y def
y
y szt
=U −U
z def
z
z szt
W tym celu wyrazimy wektor prędkości ciała sztywnego dany wz. (2.27) poprzez składowe:
→
→
→
→
U szt = U
i +U
j +U
k =
x szt
y szt
z szt
U
=U
xo
→
i +U
yo
→
j +U
zo
→
k +
→
→
→
→
→
→
+ ωx i + ω y j + ωz k (x − x o ) i + (y − y o ) j + (z − z o ) k
a po rozpisaniu rzutów wektora prędkości na poszczególne osie otrzymamy:
= U + ω (z − z o ) − ω (y − y o )
U
x szt
xo
y
z
U
U
y szt
(x − x o ) − ωx (z − z o )
= U + ω ( y − y o ) − ω (x − x o )
zo
z
y
=U
yo
+ω
z
(2.32)
z szt
w których to zależnościach występują składowe prędkości wirowania dane następującymi
zależnościami:
∂U y
1 ∂U
ω = z −
x 2 ∂y
∂z
1
ω =
y 2
∂U x ∂U z
−
∂x
∂z
1 ∂U y ∂U x
ω =
−
z 2 ∂x
∂y
Podstawiając zw. (2.32) i (2.30) do (2.31) otrzymujemy składowe prędkości deformacji:
→
→
→
→
U def = U
i +U
j +U
k
x def
y def
z def
zapisane jako rzuty na poszczególne osie układu współrzędnych:
36
(2.33)
1 ∂U y ∂U x
∂U
(y − y o ) +
+
= x (x − x o ) +
x def ∂x
2 ∂x
∂y
∂U z
1 ∂U
+ x+
(z − z o )
2 ∂z
∂x
U
(2.34)
∂U
∂U y
(y − y o ) + 1 y + ∂U x (x − x o ) +
=
y def ∂y
2 ∂x
∂y
1 ∂U y ∂U z
(z − z o )
+
+
2 ∂z
∂y
∂U z
(z − z o ) + 1 ∂U x + ∂U z (x − x o ) +
U
=
z def ∂z
2 ∂z
∂x
U
+
1 ∂U y ∂U z
(y − y o )
+
2 ∂z
∂y
W zależnościach tych występują dwa typy członów zawierających pochodne prędkości, przy
czym pierwszy z nich to zmiana wartości składowej wzdłuż danej osi. Jeżeli przedstawimy
rzut prostopadłościennego elementu płynu na płaszczyznę xy (rys. 2.9) i założymy, że
gradienty prędkości wynoszą odpowiednio:
∂U x
wzdłuż osi x
∂x
∂U y
wzdłuż osi y
∂y
wówczas z rys. 2.9 wywnioskować będziemy mogli, że ten typ pochodnych powodować
będzie odkształcenia objętościowe.
y
Uy+
Uy
y dy
Uy
dy dt
y
Ux
dx dt
x
dy
Uy
dx
Ux
Ux+
Rys.2.9.
Ux
x dx
x
Deformacja objętościowa elementu płynu.
Pokazana na rys. 2.9 ściana dy bliższa początkowi układu współrzędnych porusza się
bowiem z prędkością U a ściana przeciwległa z prędkością:
x
∂U x
U +
ds
x
∂x
37
co w czasie obserwacji dt daje przyrost długości prostopadłościanu w kierunku osi X równy:
∂U x
dx dt
∂x
Przeprowadzając podobne rozumowanie dla pozostałych ścian prostopadłościanu, dojdziemy
do wniosku, że pochodne:
∂U x
ε =
x
∂x
∂U y
(2.35)
ε =
y
∂y
∂U z
ε =
z
∂z
będziemy mogli uważać za składowe prędkości deformacji odpowiedzialne za zmiany
wymiarów liniowych elementu płynu. Pochodne te odpowiedzialne za zmiany objętości
elementu płynu zachodzące bez zmiany kątów między poszczególnymi ścianami nazywane są
składowymi odkształceń liniowych.
Pozostałe pochodne występujące w równaniach (2.34) opisują składowe prędkości deformacji
odpowiedzialne za odkształcenia postaciowe wyrażające się zmianą kątów między
odpowiednimi ścianami elementu płynu. Przykład takiego odkształcenia pokazano na rys.
2.10, który przedstawia identyczny jak na rys. 2.9 rzut analizowanego fragmentu objętości.
Ux+
y
Ux
y dy
Ux
dy dt
y
dβ
dy
Uy
dx dt
x
dα
Ux
Uy
Rys.2.10. .
Uy+
dx
Deformacja postaciowa elementu płynu.
Uy
x dx
x
Jeżeli ściana dydz bliższa początkowi układu współrzędnych porusza się wzdłuż osi y z
prędkością U , a równoległa do niej ściana porusza się z prędkością:
y
∂U y
U +
dx
y
∂x
wówczas po upływie czasu dt kąt wierzchołkowy odkształci się o:
∂U y
dα ≈
dx dt
∂x
Ten sam kąt wierzchołkowy ulega deformacji o kat dβ , proporcjonalny do różnicy przesunięć
ścian dxdz co pozwala zapisać:
38
∂U x
dydt
∂y
Kąt wierzchołkowy ulega deformacji o wielkość:
dα + dβ
a ponieważ mamy tu do czynienia z liniowym narastaniem różnicy prędkości, która zależy od
wartości gradientów prędkości wzdłuż osi x oraz y , można zapisać zatem:
∂U y ∂U x
+
dα + dβ ≈
∂x
∂y
bo iloczyn odległości i czasu obserwacji będzie jedynie współczynnikiem proporcjonalności
w powyższym związku. Można wprowadzić miarę sumarycznej deformacji kąta w
płaszczyźnie xy , która będzie równa:
∂U y
∂U
λ = x +
xy ∂y
∂x
i ze względu na symetrię zapisać będzie można:
λ
= λ
xy
yx
Analogiczne rozumowanie przeprowadzić można dla deformacji postaciowych działających
w pozostałych płaszczyznach układu współrzędnych otrzymując w ten sposób wyrażenia
określające składowe prędkości odkształceń kątowych:
∂U y
∂U
λ =λ = x +
xy
yx ∂y
∂x
∂U y ∂U z
λ =λ =
+
(2.36)
yz
zy ∂z
∂y
∂U z
∂U
λ =λ = x +
xz
zx ∂z
∂x
Uwzględnienie zw. (2.36) i (2.35) w wyrażeniu (2.34) pozwala zapisać składowe prędkości
deformacji w następującej postaci:
1
1
U
= ε (x − x o ) + λ (y − y o ) + λ (z − z o )
xy
xdef
x
2 xz
2
dβ ≈
U
U
ydef
zdef
=ε
=ε
z
(y − y o )+ 1 λ xy (x − x o )+ 1 λ yz (z − z o )
y
2
2
(2.37)
(z − z o ) + 1 λ xz (x − x o ) + 1 λ yz (y − y o )
2
2
Jeżeli wprowadzimy następującą funkcję:
1
φ (x , y, z, t ) = ε x (x − x o )2 + ε (y − y o )2 + ε (z − z o )2 +
z
y
2
(2.38)
(x − x o )(y − y o ) + λ yz (y − y o )(z − z o ) + λ zx (z − z o )(x − x o ) ]
xy
wówczas jej pochodne cząstkowe będą równe składowym prędkości deformacji zgodnie z
przekształceniem:
1
1
∂φ
= ε (x − x o ) + λ (y − y o ) + λ (z − z o ) = U
xdef
2 xz
2 xy
∂x x
Funkcja φ (x , y, z, t ) jest zatem funkcją potencjału pola prędkości deformacji, co pozwala
zapisać:
+λ
39
∂φ
∂x
∂φ
U
=
(2.39)
ydef
∂y
∂φ
U
=
zdef
∂z
i pole odkształceń spełniające warunek (2.39) nazywane jest polem czystego odkształcenia.
W zapisie wektorowym prędkość deformacji zapisać można:
→
→
→
→
U def = U
i +U
j +U
k =
xdef
ydef
zdef
U
xdef
=
∂φ → ∂φ → ∂φ →
i +
j +
k = grad φ
∂x
∂y
∂z
Ogólny zapis pola prędkości płynu wyrażony zw. (2.30) zapisać można z wykorzystaniem zw.
(2.27) oraz (2.32), (2.33), (2.38) w sposób następujący:
→ →
→ → →
(2.40)
U = U o + ω x r − r o + grad φ
→
Zależność (2.40) wyraża I twierdzenie Helmholtza zgodnie z którym, prędkość U
(bieguna) jest
dowolnego punktu M płynu położonego w otoczeniu punktu M
o
superpozycją:
ruchu postępowego bieguna
−
→
→
→
Uo = U
i +U
j +U k
xo
yo
zo
ruchu obrotowego wokół osi przechodzącej przez biegun co daje składową prędkości
liniowej
→ → →
ω x r − r o
ruchu czystego odkształcenia
grad φ
W przepływie jednowymiarowym prędkość wirowania równa jest zeru (patrz wz. (2.33)) i
wówczas w płynie istnieć mogą jedynie składowe prędkości postępowej i deformacji
objętościowych (liniowych – patrz wz. (2.35)). W przepływach dwu i trójwymiarowych
istnieć mogą wszystkie trzy składowe pola prędkości, w tym prędkości wirowania oraz
deformacji objętościowych i postaciowych.
=
40
... zobacz całą notatkę
Komentarze użytkowników (0)