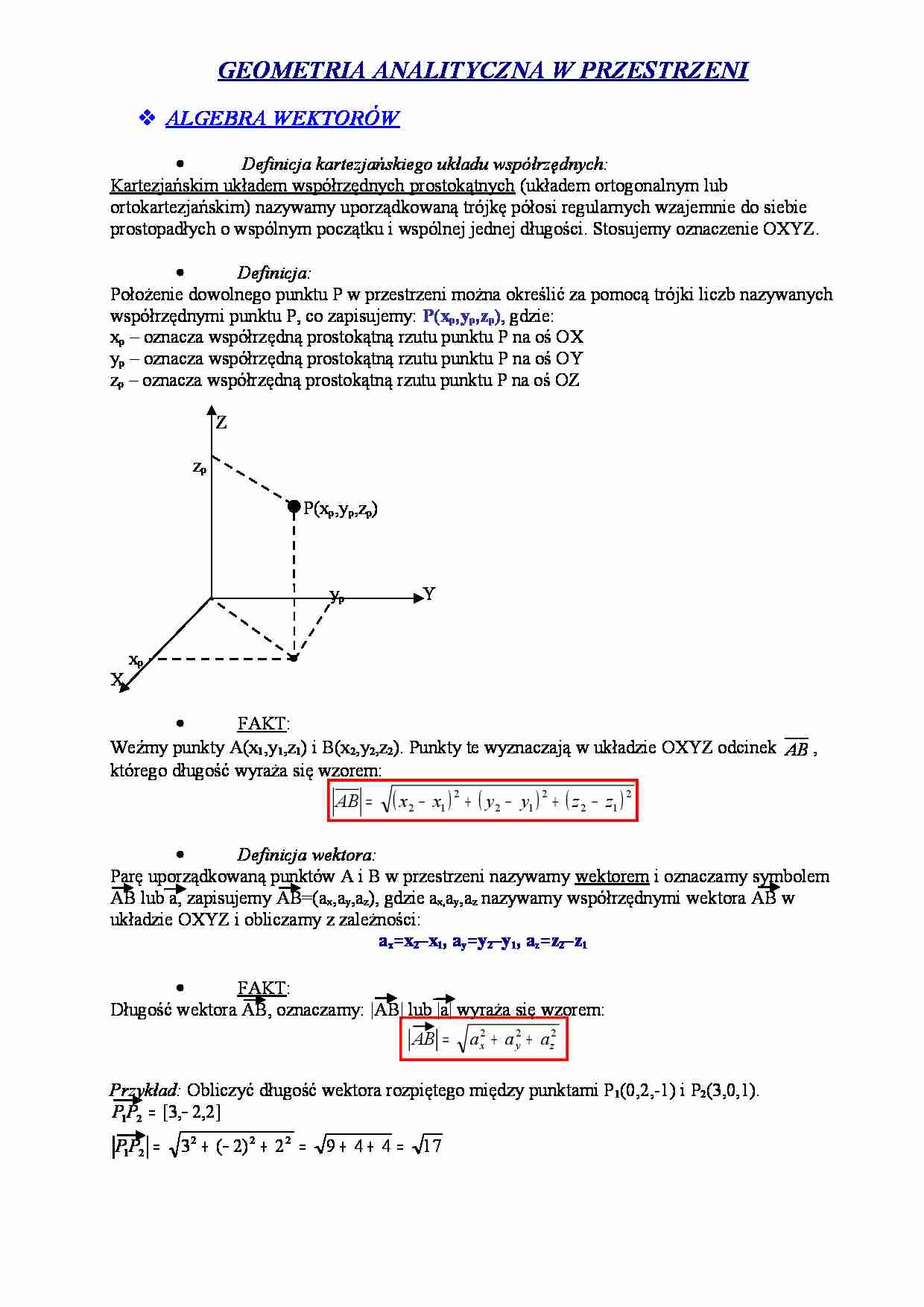
GEOMETRIA ANALITYCZNA W PRZESTRZENI ALGEBRA WEKTORÓW • Definicja kartezjańskiego układu współrzędnych: Kartezjańskim układem współrzędnych prostokątnych (układem ortogonalnym lub ortokartezjańskim) nazywamy uporządkowaną trójkę półosi regularnych wzajemnie do siebie prostopadłych o wspólnym początku i wspólnej jednej długości. Stosujemy oznaczenie OXYZ. • Definicja: Położenie dowolnego punktu P w przestrzeni można określić za pomocą trójki liczb nazywanych współrzędnymi punktu P, co zapisujemy: P(xp,yp,zp) , gdzie: xp – oznacza współrzędną prostokątną rzutu punktu P na oś OX yp – oznacza współrzędną prostokątną rzutu punktu P na oś OY zp – oznacza współrzędną prostokątną rzutu punktu P na oś OZ Z zp P(xp,yp,zp) yp Y xp X • FAKT : Weźmy punkty A(x1,y1,z1) i B(x2,y2,z2). Punkty te wyznaczają w układzie OXYZ odcinek AB , którego długość wyraża się wzorem: ( ) ( ) ( )2 1 2 2 1 2 2 1 2 z z y y x x AB − + − + − = • Definicja wektora: Parę uporządkowaną punktów A i B w przestrzeni nazywamy wektorem i oznaczamy symbolem AB lub a, zapisujemy AB=(ax,ay,az), gdzie ax,ay,az nazywamy współrzędnymi wektora AB w układzie OXYZ i obliczamy z zależności: ax=x2–x1, ay=y2–y1, az=z2–z1 • FAKT : Długość wektora AB, oznaczamy: |AB| lub |a| wyraża się wzorem: 2 2 2 z y x a a a AB + + = Przykład: Obliczyć długość wektora rozpiętego między punktami P1(0,2,-1) i P2(3,0,1). 17 4 4 9 2 ) 2 ( 3 ] 2 , 2 , 3 [ 2 2 2 2 1 2 1 = + + = + − + = − = P P P P • Definicja sumy wektorów: Sumą wektorów a=[ax,ay,az] i b=[bx,by,bz] nazywamy wektor, którego współrzędne tworzymy dodając odpowiednie składowe wektorów a i b, tj. wektor postaci: a + b = [ax+bx ; ay+by ; az+bz] a a + b b b • Własności sumy wektorów: 1) a+b=b+a (przemienność) 2) (a+b)+c=a+(b+c) (łączność) 3) a+0=0+a=a (element neutralny dodawania wektorów) 4) a+(-a)=0 (wektor przeciwny) • Definicja iloczynu wektora przez liczbę: Iloczynem wektora (niezerowego) a przez liczbę λ∈ R, λ ≠ 0 nazywamy wektor λa skierowany zgodnie ze skierowaniem wektora a jeśli λ0, a przeciwnie, jeśli λ
(…)
…, o długości równej |λa| w
postaci. λa=[ λax, λay, λaz].
Jeśli λ=0 lub a=0 to iloczyn ten jest wektorem zerowym.
•
Własności iloczynu wektora przez liczbę:
1) (λ+α)a=λa+αa
2) λ(αa)=(λα)a
dla α, λ∈ R
•
Definicja kombinacji liniowej n wektorów:
Weźmy n wektorów a1, a2,..., an oraz n liczb λ1, λ2,..., λn ∈ R. Kombinacją liniową wektorów a1,
a2,..., an nazywamy wektor postaci:
λ 1a1 + λ 2 a2 + ... + λ n a n =
n…
… jeśli są liniowo zależne, natomiast trzy wektory a, b i
c koplanarne jeśli są one liniowo zależne.
•
Definicja rzutu prostokątnego punktu:
Rzutem prostokątnym punktu A na oś (skierowaną) S nazywamy punkt A’, w którym prostopadła
poprowadzona przez punkt A do osi S przecina ją.
A
S
.
A’
•
Definicja rzutu prostokątnego wektora:
Rzutem prostokątnym wektora a=AB na oś (skierowaną) S nazywamy wektor as=A’B…
…
a
a
Y
c
X
c
X
Y
a
a
b
b
•
FAKT:
Niech a=[ax,ay,az], b=[bx,by,bz] i c=[cx,cy,cz] będą wektorami w przestrzeni. Wektory te tworzą układ
w orientacji zgodnej z orientacją układu współrzędnych, jeśli:
ax a y az
bx b y bz > 0
cx c y cz
W przypadku, kiedy podany wyznacznik jest ujemny, mówimy, że orientacja układu wektorów a, b
i c jest przeciwna do orientacji układu współrzędnych.
ILOCZYN WEKTOROWY WEKTORÓW…
... zobacz całą notatkę


Komentarze użytkowników (0)