Temat sprawozdania to: dobór parametrów regulatora - symulacja komputerowa. Zajęcia prowadzone są na Politechnice Świętokrzyskiej, prowadzi je dr inż. Stanisław Dziechciarz. Notatka porusza zagadnienia takie jak: obiekt regulacji, regulator, sygnał regulowany, sygnał wejściowy, sygnał sterujący, sygnał zadany, sygnał błędu, sygnał uchybu, układy stabilizacji automatycznej, układy nadążne, układy regulacji programowej, układy regulacji ekstremalnej, regulator PID, symulacja w programie SciLab.
Politechnika Świętokrzyska
Wydział Mechatroniki i Budowy Maszyn
Centrum Laserowych Technologii Metali PŚk i PAN
Zakład Informatyki i RobotykiPrzedmiot:Podstawy Automatyzacji - laboratorium, rok I, sem. II,Specjalność: SUM - Inżynieria Produkcji, studia uzupełniające, 2002÷2003.Ćwiczenie nr 3.Dobór parametrów regulatora - symulacja komputerowa1. Wstęp
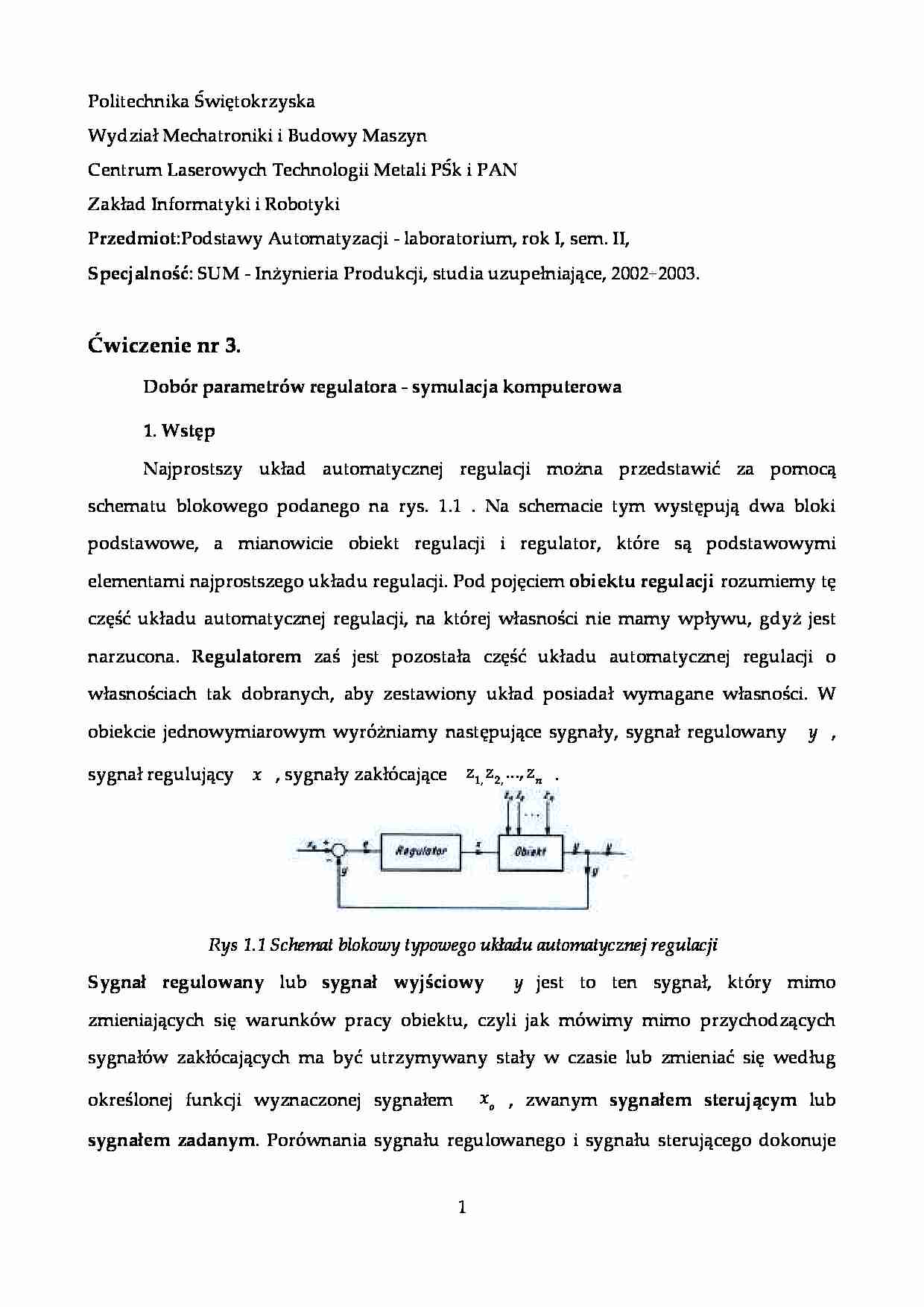
Najprostszy układ automatycznej regulacji można przedstawić za pomocą
schematu blokowego podanego na rys. 1.1 . Na schemacie tym występują dwa bloki
podstawowe, a mianowicie obiekt regulacji i regulator, które są podstawowymi
elementami najprostszego układu regulacji. Pod pojęciem obiektu regulacji rozumiemy tę
część układu automatycznej regulacji, na której własności nie mamy wpływu, gdyż jest
narzucona. Regulatorem zaś jest pozostała część układu automatycznej regulacji o
własnościach tak dobranych, aby zestawiony układ posiadał wymagane własności. W
obiekcie jednowymiarowym wyróżniamy następujące sygnały, sygnał regulowanyy ,
sygnał regulujący x , sygnały zakłócające z z ..., z
.
1,
2,n Rys 1.1 Schemat blokowy typowego układu automatycznej regulacjiSygnał regulowany lub sygnał wyjściowyy jest to ten sygnał, który mimo
zmieniających się warunków pracy obiektu, czyli jak mówimy mimo przychodzących
sygnałów zakłócających ma być utrzymywany stały w czasie lub zmieniać się według
określonej funkcji wyznaczonej sygnałemx
, zwanym sygnałem sterującym lubosygnałem zadanym. Porównania sygnału regulowanego i sygnału sterującego dokonuje
1się w tzw. węźle sumacyjnym. Otrzymana w tym węźle różnicax −y , czyli tzw. sygnałobłędu lub sygnał uchybue , zostaje wprowadzona na wejście elementu zwanego
regulatorem. Zadaniem regulatora jest taka zmiana sygnału regulującego lub sygnałuwyjściowego x , aby sygnał błędu e był jak najmniejszy, czyli aby sygnał regulowanyy
różnił się jak najmniej od sygnału sterującegox
. Na wyjściu obiektu znajduje sięo
tzw. węzeł informacyjny umożliwiający pobranie z wyjścia obiektu sygnału regulowanegoy
potrzebnego do doprowadzenia tzw. pętlą sprzężenia zwrotnego do węzła
sumacyjnego.
Układ automatycznej regulacji tworzy więc tzw. układ zamknięty, przy czym
chodzi w tym przypadku o jego zamknięcie wspomnianą pętlą sprzężenia zwrotnego. W
przypadku gdy obiekt jest elementem wielowymiarowym, a więc o wielu sygnałach
wejściowych i wyjściowych, regulator musi być również wielowymiarowy. Schemat
blokowy układu automatycznej regulacji dla tego przypadku jest pokazany na rys 1.2.
Klasyfikację układów automatycznej regulacji można przeprowadzić biorąc pod
uwagę różne kryteria. Najczęściej spotyka się podziały dokonane ze względu na:
(…)
…, czas regulacji; związane z charakterystyką częstotliwościową: zapasy modułu i fazy, pasmo przenoszenia; całkowe wskaźniki jakości: liniowy, kwadratowy), zarówno przy zmianie wartości zadanej jak i zakłóceń.
Metody doboru nastaw regulatora:
Dobór nastaw w funkcji parametrów obiektu (procesu) regulowanego dla przyjętego kryterium jakości regulacji. Są to najczęściej zestawienia w postaci tabel…
…
Td = 0,4
3
kp = -1,5
Ti = 1
Td = 0,4
WNIOSKI:
Utrzymanie wartości współczynnika wzmocnienia na poziomie -1,2; zmniejszenie wartości stałej czasowej całkującej z 1 do 0,5; zwiększenie wartości stałej czasowej różniczkującej z 0,1 do 0,4 powoduje zmniejszenie przeregulowania Cmr z wartości 0,75 do 0,2 zmniejszenie czasu regulacji trr z 25,5 do 12,5 przy statycznym błędzie regulacji (Cur) równym 0. Zmniejszenie wartości współczynnika wzmocnienia z -1,2 na -1,5; zwiększenie wartości stałej całkującej z 0,5 na 1 i utrzymanie wartości stałej czasowej różniczkującej na tym samym poziomie 0,4 powoduje wzrost przeregulowania Cmr z 0,2 na 0,7 zwiększenie czasu regulacji trr z 12,5 do 18 przy statycznym błędzie regulacji (Cur) równym 0.
7
0…
… - wzmocnienie,
T i - czas zdwojenia (stała czasowa akcji całkującej),
T d - czas wyprzedzenia (stała czasowa akcji różniczkującej),
T - stała czasowa.
Regulator PID cechuje prosta konstrukcja oraz duża uniwersalność zastosowań.
Przez lata dopracowano się również dużej niezawodności układu. Znajduje on
zastosowanie głownie do stałowartościowej regulacji przepływu, temperatury, położenia,
prędkości, ciśnienia…
…);xselect();bode(Tpid);
-->mode(-1)
-->case 2
-->if Plant(4)=='c' then
-->mode(1)
-->defv=['0.1','50'];
-->title='Wprowadź okres próbkowania i czas symulacji';
-->rep=x_mdialog(title,['Okres próbkowania?';'Czas symulacji?
'],defv);
-->if rep==[] then break,end
-->dttmax=evstr(rep);
-->dt=evstr(dttmax(1));tmax=evstr(dttmax(2));
-->t=0:dt/5:tmax;
-->n1=x_choose(['Charakterystyka skokowa?';'Charakterystyka…
... zobacz całą notatkę


Komentarze użytkowników (0)