To tylko jedna z 6 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę


Wykład 1
Zagadnienie brzegowe liniowej teorii sprężystości.
Metody rozwiązywania, metody wytrzymałości materiałów.
Zestawienie wzorów i określeń.
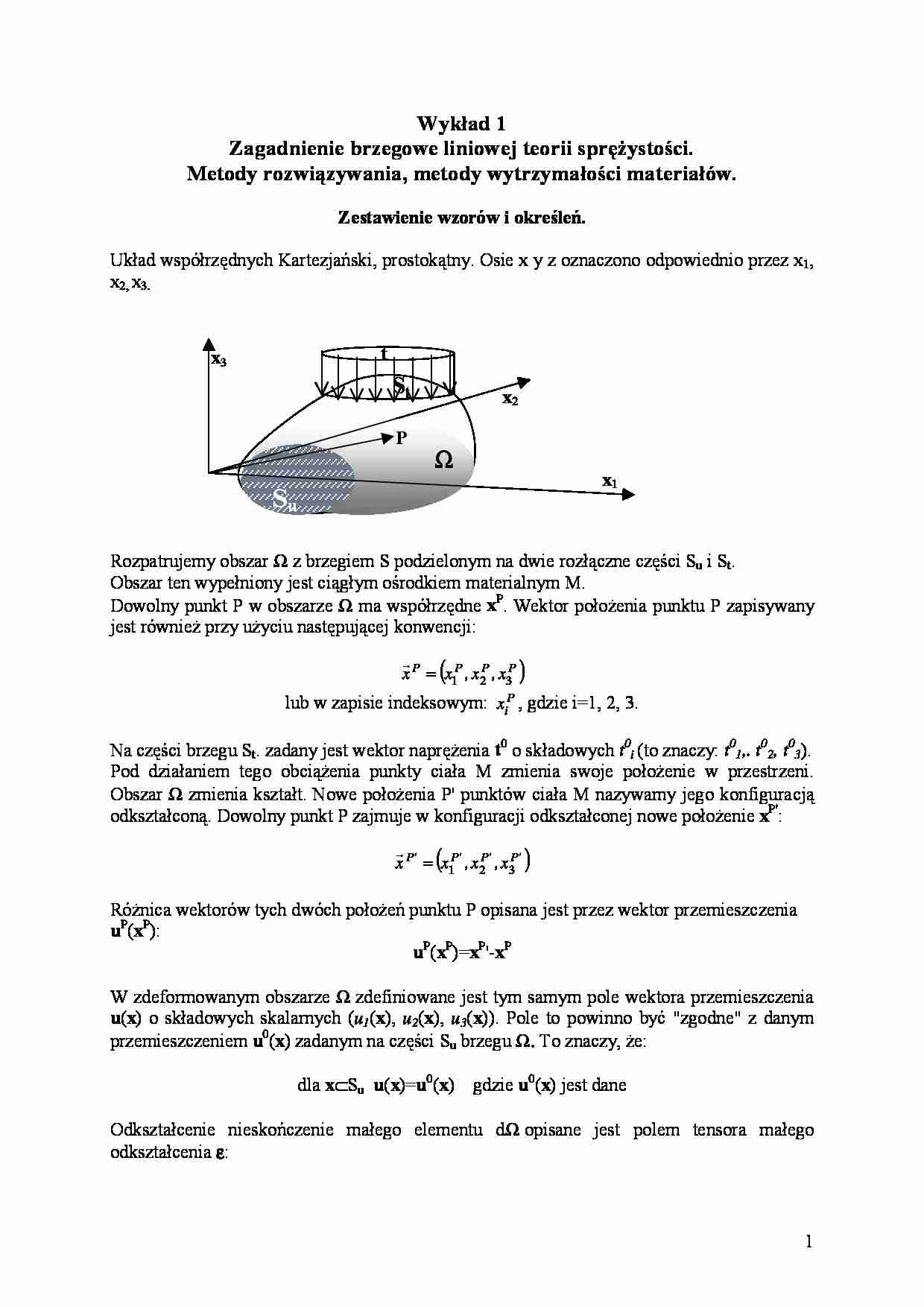
Układ współrzędnych Kartezjański, prostokątny. Osie x y z oznaczono odpowiednio przez x1,
x2, x3.
t
x3
St
P
x2
Ω
x1
Su
Rozpatrujemy obszar Ω z brzegiem S podzielonym na dwie rozłączne części Su i St.
Obszar ten wypełniony jest ciągłym ośrodkiem materialnym M.
Dowolny punkt P w obszarze Ω ma współrzędne xP. Wektor położenia punktu P zapisywany
jest również przy użyciu następującej konwencji:
(
!
P
P
P
x P = x1 , x 2 , x3
)
lub w zapisie indeksowym: xiP , gdzie i=1, 2, 3.
Na części brzegu St. zadany jest wektor naprężenia t0 o składowych t0i (to znaczy: t01,. t02, t03).
Pod działaniem tego obciążenia punkty ciała M zmienia swoje położenie w przestrzeni.
Obszar Ω zmienia kształt. Nowe położenia P' punktów ciała M nazywamy jego konfiguracją
odkształconą. Dowolny punkt P zajmuje w konfiguracji odkształconej nowe położenie xP':
(
!
P
P
P
x P' = x1 ' , x 2 ' , x3 '
)
Różnica wektorów tych dwóch położeń punktu P opisana jest przez wektor przemieszczenia
uP(xP):
uP(xP)=xP'-xP
W zdeformowanym obszarze Ω zdefiniowane jest tym samym pole wektora przemieszczenia
u(x) o składowych skalarnych (u1(x), u2(x), u3(x)). Pole to powinno być "zgodne" z danym
przemieszczeniem u0(x) zadanym na części Su brzegu Ω. To znaczy, że:
dla x⊂Su u(x)=u0(x) gdzie u0(x) jest dane
Odkształcenie nieskończenie małego elementu dΩ opisane jest polem tensora małego
odkształcenia ε:
1
!
!
! 1 ∂u i (x ) ∂u j (x )
+
ε ij (x ) =
∂xi
2 ∂x j
lub zapisując skrótowo:
ε ij =
(
1
∂u + ∂u j ,i
2 i, j
)
Składowe tensora małego odkształcenia reprezentowane są przez macierz pól skalarnych:
ε 11 ε 12 ε 13
ε = ε 21 ε 22 ε 23
ε 31 ε 32 ε 33
Myślowo wyodrębniony z obszaru Ω element dΩ oddziałuje z resztą obszaru, poprzez
element powierzchni dS, za pośrednictwem wektora naprężeń t. Składowe wektora naprężeń t
zależą nie tylko od punktu M w położeniu odkształconym P' ale także od orientacji
przestrzennej element powierzchni dS poprowadzonej przez P'. Ta orientacja zadana jest za
pośrednictwem n - jednostkowego wektora normalnego do dS. Wektor ten ma współrzędne
następujące:
n={cos(n,Ox1), cos(n,Ox2), cos(n,Ox3)}
Wielkością charakteryzującą stan naprężenia w punkcie ciała M w jego położeniu P' jest
tensor naprężenia τ. Jest on związany z wektorem naprężenia w punkcie materialnym M
zależnością:
3
!
!
! !
∑ τ ij (x )n j (x ) = t i (x , n )
j =1
Interpretacja i umowa o znakach dla macierzy składowych tensora naprężenia znana jest z
dotychczasowego kursu wytrzymałości materiałów.
τ 11 τ 12 τ 13
τ = τ 21 τ 22 τ 23
τ 31 τ 32 τ 33
Warunki równowagi zapisane dla element dΩ prowadzą do sześciu równań (b jest wektorem
sił masowych):
τ ij = τ ji
dla i=1,2,3:
∂τ i1
∂x1
+
(symetria tensora naprężenia)
∂τ i 2
∂x 2
+
∂τ i 3
∂x3
+ bi = 0
3
lub skrótowo: ∑ τ ij , j + bi = 0
j =1
Związek
(…)
… ji
3
∑ τ ij , j
j =1
)
+ bi = 0
oraz naprężeniowe warunki brzegowe (równowaga elementu w sąsiedztwie brzegu St):
3
!
∑ τ ij (u )n j
j =1
= t i0
na części brzegu St
Poniżej przedstawiono przykład sformułowania przemieszczeniowego. Jest to układ równań
Naviera. Jego wyprowadzenie wymaga wykonania następujących operacji:
• u → ε(u) → prawo Hooke'a→ τ=τ( ε
τ ε(u))
• Podstawienie τ( ε(u)) do równań równowagi.
ε
Otrzyma się w ten sposób równania równowagi wyrażone przez przemieszczenia:
3
!
∑ τ ij , j (u ) + bi
j =1
=0
3
!
!
ν
E
ε ij , j (u ) +
δ ij ∑ ε kk , j (u ) + bi = 0
∑
1 − 2ν
j =11 + ν
k =1
3
3
ν
E 1
E
u i , jj + u j ,ij +
∑
∑ u + bi = 0
1 + ν 1 − 2ν k =1 k ,ki
j =11 + ν 2
3
ν
E 1
E 1 3
E
u i , jj +
+
∑
∑ u k ,ki + bi = 0
1 + ν 1 − 2ν 1 + ν 2 k =1
j =11 + ν 2
(zauważmy…
... zobacz całą notatkę
Komentarze użytkowników (0)