Problemy mechatronicznego
podejścia
do projektowania
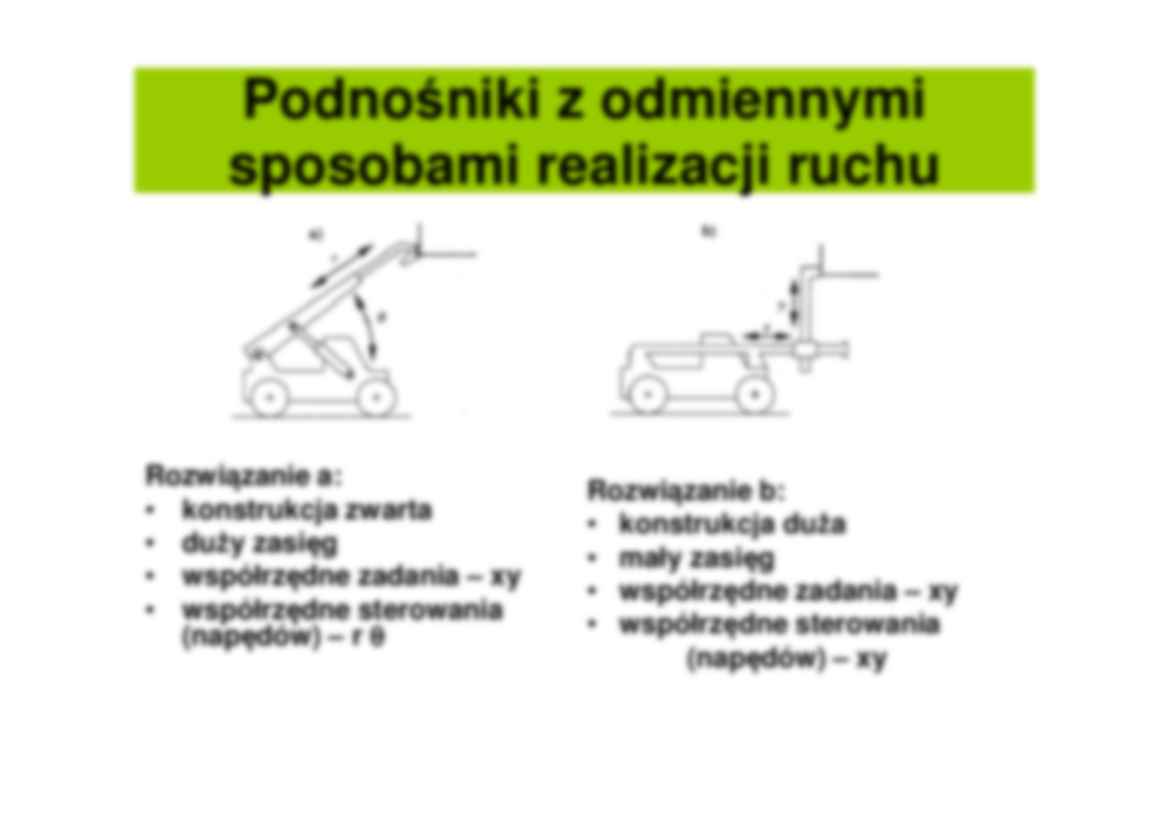
Podnośniki z odmiennymi
sposobami realizacji ruchu
Rozwiązanie a:
• konstrukcja zwarta
• duży zasięg
• współrzędne zadania – xy
• współrzędne sterowania
(napędów) – r θ
Rozwiązanie b:
• konstrukcja duża
• mały zasięg
• współrzędne zadania – xy
• współrzędne sterowania
(napędów) – xy
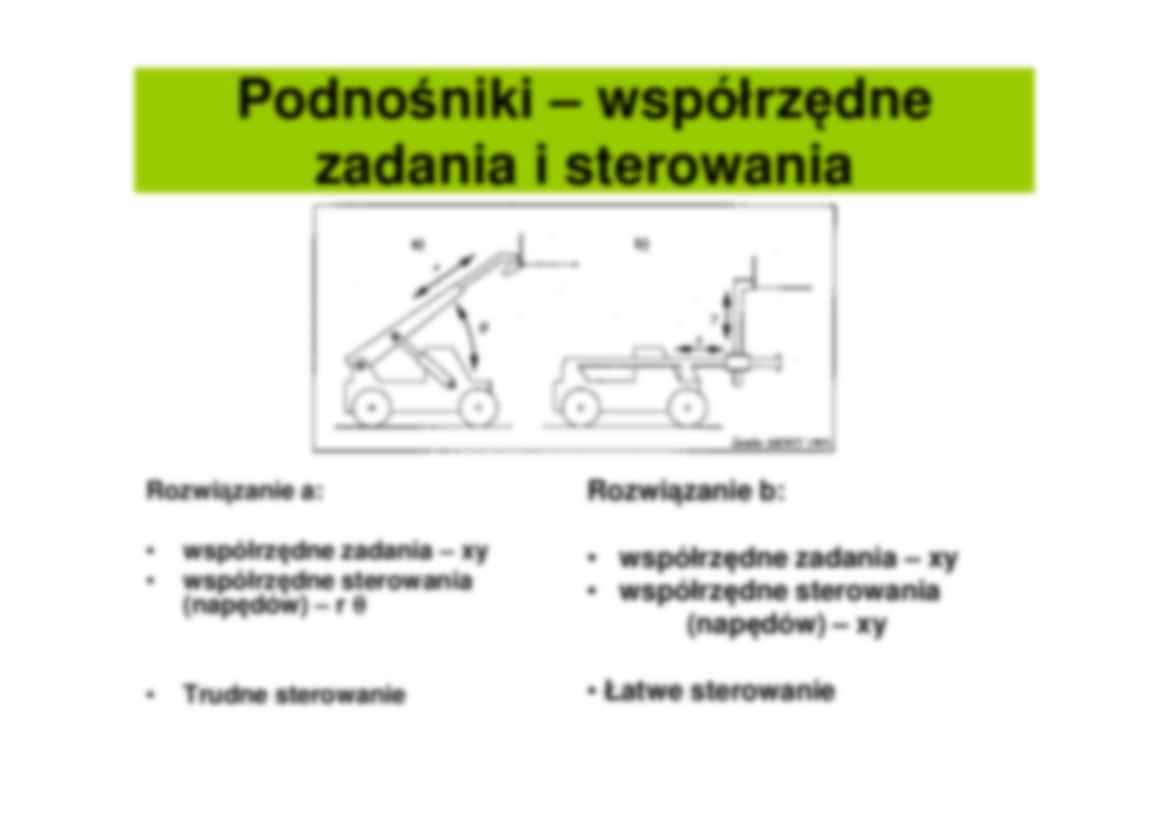
Podnośniki – współrzędne
zadania i sterowania
Rozwiązanie a:
Rozwiązanie b:
•
•
współrzędne zadania – xy
współrzędne sterowania
(napędów) – r θ
• współrzędne zadania – xy
• współrzędne sterowania
(napędów) – xy
•
Trudne sterowanie
• Łatwe sterowanie
Zależność pomiędzy współrzędnymi
napędów (r, θ), a współrzędnymi
procesu (x, y) można przedstawić
związkami
x x( r, Θ)
≡
y y ( r, Θ)
Po zróżniczkowaniu powyższego otrzymamy:
∂x
x
∂r
• = ∂y
y
∂r
•
∂x •
r
∂Θ •
∂x Θ
∂Θ
•
•
x
r
• = J (Φ ) •
Θ
y
gdzie: J(Φ) jest tzw. jakobianem.
Φ
Odwracając powyższe równanie
otrzymamy:
•
•
r
x
−1
• = J (Φ ) •
Θ
y
Mechatroniczne sterowanie ruchem
podnośnika
Mechatroniczne sterowanie
centralne
Porównanie układu
mechatronicznego z tradycyjnym
Równiarka - maszyna do
niwelacji gruntu
Równiarka - maszyna do
niwelacji gruntu
Równiarka - maszyna do
niwelacji gruntu
Równiarka – współrzędne procesu i
sterowania
Współrzędne zadania (procesu) – pozycjonowanie i orientowanie
lemiesza w przestrzeni:
- kartezjańskie - xyz, αx αy αz
Współrzędne sterowania napędów:
- długości siłowników: l1, l2, l3, l4, l5, α6
Związki pomiędzy ruchami maszyny, a przestrzenią zadania można
sformułować w postaci:
x x (l1 , l 2 , l 3 , l 4 , l5 , α 6 )
y y (l , l , l , l , l , α )
1 2 3 4 5 6
z z (l1 , l 2 , l 3 , l 4 , l5 , α 6 )
=
α x α x (l1 , l 2 , l3 , l 4 , l5 , α 6 )
α y α y (l1 , l 2 , l 3 , l 4 , l5 , α 6 )
α z α z (l1 , l 2 , l3 , l 4 , l5 , α 6 )
Równiarka – rozwiązanie
kompletne
Maszyna do równania zwisów
skalnych w kopalniach
Nawijarka przędzy
Nawijarka przędzy
Pułapka na myszy - czy
mechatronizacja ma zawsze sens?
Pułapka na myszy –
mechatroniczno - ekologiczna
Cechy systemów projektowanych
konwencjonalnie i mechatronicznie
Cechy systemów projektowanych
konwencjonalnie i mechatronicznie
Przykład realizacji systemu konwencjonalnie i
mechatronicznie – samochód osobowy
Projektowanie Konwencjonalne
1. Mechaniczny podwójny gaźnik
2. Mechanicznie sterowana pompa
wtryskowa zawory wtryskowe
3. Wiele kabli
4. Napęd pasowy urządzeń pomocniczych
5. Mechaniczny pedał gazu
6. Ręczne (nożne) sterowanie samochodem
podczas poślizgu kół
7. Monitorowanie gazów wydechowych
podczas przeglądu w warsztacie
8. Stałe programy dla automatycznej skrzyni
Projektowanie Mechatroniczne
1. Wtrysk elektroniczny
2. Pompa wysokociśnieniowa i magnetyczne
zawory wtryskowe (common rail)
3. Magistrala kablowa
4. Zdecentralizowany napęd urządzeń
(…)
… i magnetyczne
zawory wtryskowe (common rail)
3. Magistrala kablowa
4. Zdecentralizowany napęd urządzeń
pomocniczych
5. Elektroniczne, nieliniowe sterowanie
przepustnicą
6. Sprzężeniowo zwrotne sterowanie kątem
podczas poślizgu kół przez
obserwatora stanu poślizgu i
zróżnicowane hamowanie (ABS)
7. Natychmiastowe wykrywanie złego spalania
przez pomiar szybkości wału
korbowego (sonda lambda)
8. Adaptacja automatycznej skrzyni biegów do
biegów konkretnego kierowcy
Ogólny schemat urządzenia
mechatronicznego
Poziomy autonomii urządzenia
mechatronicznego:
Urządzenie w pełni autonomiczne
(niezależne od człowieka):
–
–
–
–
potrafi podejmować decyzje
potrafi zapobiegać błędom człowieka
kontroluje działania człowieka
podejmuje ostateczną decyzję
Urządzenie automatyczne:
– człowiek podejmuje ostateczną decyzję
…
… automatycznej skrzyni biegów do
biegów konkretnego kierowcy
Ogólny schemat urządzenia
mechatronicznego
Poziomy autonomii urządzenia
mechatronicznego:
Urządzenie w pełni autonomiczne
(niezależne od człowieka):
–
–
–
–
potrafi podejmować decyzje
potrafi zapobiegać błędom człowieka
kontroluje działania człowieka
podejmuje ostateczną decyzję
Urządzenie automatyczne:
– człowiek podejmuje ostateczną decyzję
…
... zobacz całą notatkę
Komentarze użytkowników (0)