To tylko jedna z 3 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę
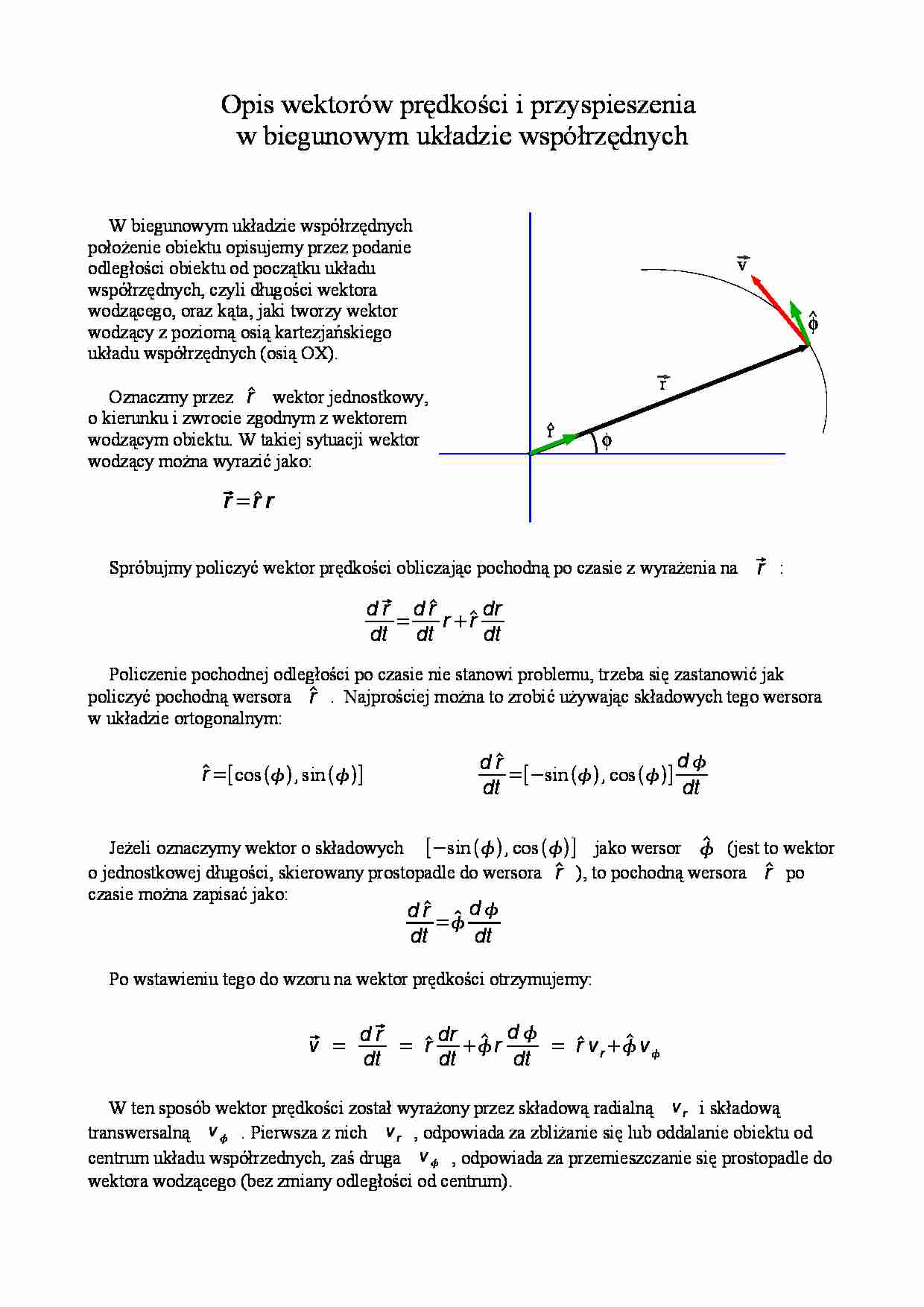


Opis wektorów prędkości i przyspieszenia w biegunowym układzie współrzędnych W biegunowym układzie współrzędnych położenie obiektu opisujemy przez podanie odległości obiektu od początku układu współrzędnych, czyli długości wektora wodzącego, oraz kąta, jaki tworzy wektor wodzący z poziomą osią kartezjańskiego układu współrzędnych (osią OX). Oznaczmy przez r wektor jednostkowy, o kierunku i zwrocie zgodnym z wektorem wodzącym obiektu. W takiej sytuacji wektor wodzący można wyrazić jako: Spróbujmy policzyć wektor prędkości obliczając pochodną po czasie z wyrażenia na r : Policzenie pochodnej odległości po czasie nie stanowi problemu, trzeba się zastanowić jak policzyć pochodną wersora r . Najprościej można to zrobić używając składowych tego wersora w układzie ortogonalnym: Jeżeli oznaczymy wektor o składowych [−sin , cos] jako wersor (jest to wektor o jednostkowej długości, skierowany prostopadle do wersora r ), to pochodną wersora r po czasie można zapisać jako: Po wstawieniu tego do wzoru na wektor prędkości otrzymujemy: W ten sposób wektor prędkości został wyrażony przez składową radialną v r i składową transwersalną v . Pierwsza z nich vr , odpowiada za zbliżanie się lub oddalanie obiektu od centrum układu współrzednych, zaś druga v , odpowiada za przemieszczanie się prostopadle do wektora wodzącego (bez zmiany odległości od centrum). r v φ φ r ∧ ∧ r = r r d r dt = d r dt r r dr dt r =[cos , sin] d r dt =[−sin , cos] d dt d r dt = d dt v = d r dt = r dr dt r d dt = r v r v W następnym kroku policzmy wektor przyspieszenia, jako pochodną po czasie wektora prędkości: Biorąc pod uwagę, że: oraz że: otrzymujemy na wektor przyspieszenia nastepujące wyrażenie: a dalej: Tak więc wyraziliśmy wektor przyspieszenia a przez jego składowe równoległe odpowiednio do wersora r (składowa radialna) i wersora (składowa transwersalna). Jak widać tylko jeden z wyrazów tego równania nie zawiera pochodnej φ po czasie. Jest to przypieszenie związane z przybliżaniem się lub oddalaniem obiektu bez zmiany kierunku jego wektora wodzącego, które wyraża sie przez drugą pochodna odległości po czasie. Ciekawsze jest przyjrzenie się co otrzymujemy, kiedy wymusimy ruch ze stałą odległością od centrum (np. po kole), czyli z zerową wartościa pochodnej odległości po czasie. Wtedy:
(…)
… i wynosi po prostu ω , gdzie ω
jest prędkością kątową obrotu naszego układu współrzędnych. Ponieważ ω jest stała w czasie, to
druga pochodna kąta po czasie staje się równa zero. Jeżeli na dodatek założymy, że ciało porusza
się radialnie ruchem jednostajnym, to uwzględniając to wszystko otrzymujemy następujące
wyrażenie na przyspieszenie:
a =−r r 2 2 v r
Jak widać otrzymane wyrażenie pozostaje w sprzeczności z faktem braku przyspieszenia
obserwowanego przez obserwatora w obracającym się układzie. Jedyną mozliwością pogodzenia
tych dwóch stanowisk, jest wprowadzenie dodatkowych sił „pozornych” tak aby obserwowane
przyspieszenie było równe zeru. Aby tak było trzeba dodać siłę odśrodkową i tzw. siłę Coriolisa:
F od =m r 2 r
F Cor =−2 v r
…
... zobacz całą notatkę
Komentarze użytkowników (0)