To tylko jedna z 19 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę

Tablica 2 Związek między liczbą członów
n i liczbą par kinematycznych piątej klasy p5
n
1
3
5
7
9
11
13
…
p5
1
4
7
10
13
16
19
…
Dla każdej z wyniesionych par kinematycznych istnieje przynajmniej jedno rozwiązanie.
Typowe mechanizmy chwytaków przedstawia tabl. 3.
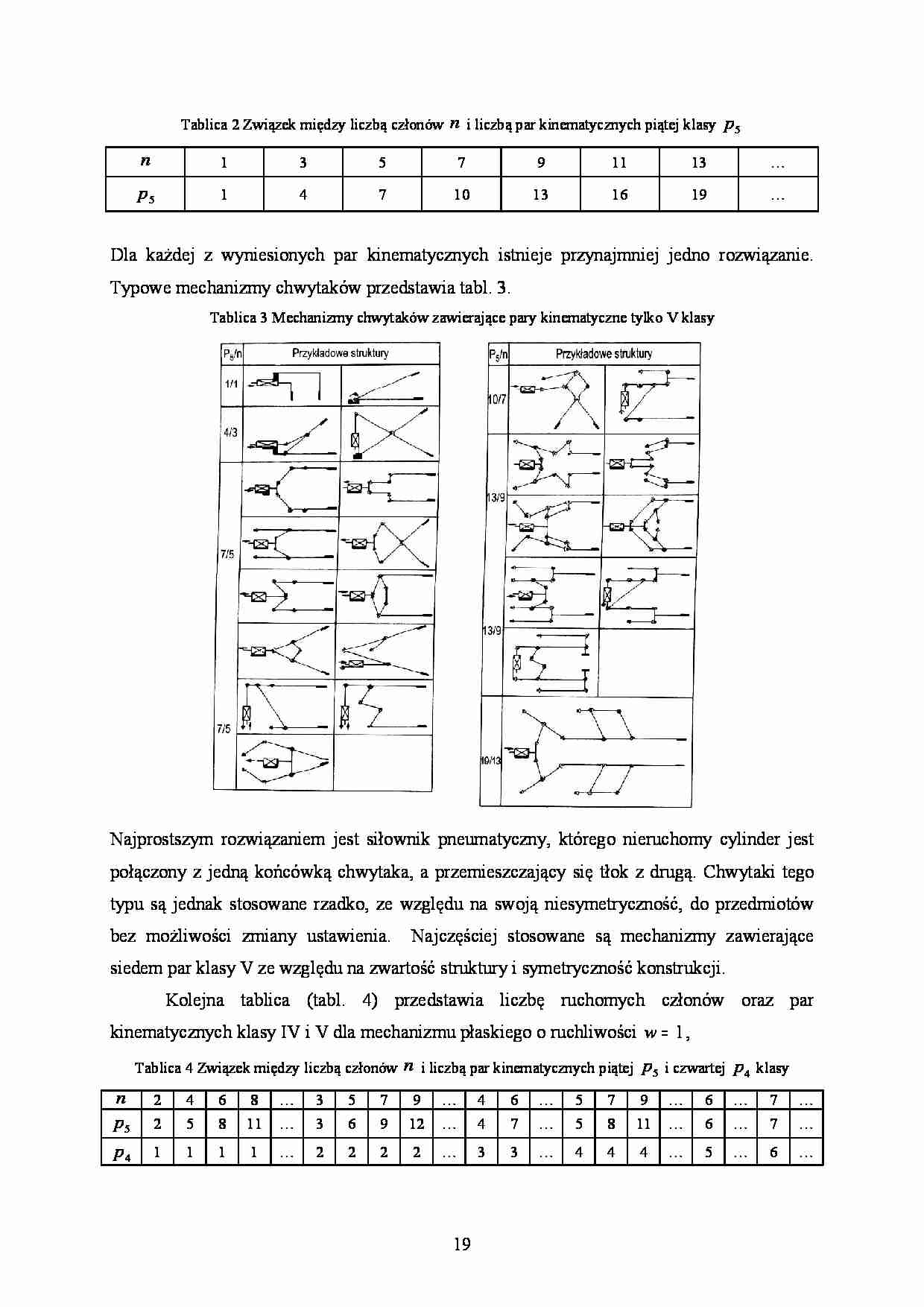
Tablica 3 Mechanizmy chwytaków zawierające pary kinematyczne tylko V klasy
Najprostszym rozwiązaniem jest siłownik pneumatyczny, którego nieruchomy cylinder jest
połączony z jedną końcówką chwytaka, a przemieszczający się tłok z drugą. Chwytaki tego
typu są jednak stosowane rzadko, ze względu na swoją niesymetryczność, do przedmiotów
bez możliwości zmiany ustawienia.
Najczęściej stosowane są mechanizmy zawierające
siedem par klasy V ze względu na zwartość struktury i symetryczność konstrukcji.
Kolejna tablica (tabl. 4) przedstawia liczbę ruchomych członów oraz par
kinematycznych klasy IV i V dla mechanizmu płaskiego o ruchliwości w = 1 ,
Tablica 4 Związek między liczbą członów
n i liczbą par kinematycznych piątej p5 i czwartej p 4 klasy
n
p5
2
4
6
8
…
3
5
7
9
…
4
6
…
5
7
9
…
6
…
7
…
2
5
8
11
…
3
6
9
12
…
4
7
…
5
8
11
…
6
…
7
…
p4
1
1
1
1
…
2
2
2
2
…
3
3
…
4
4
4
…
5
…
6
…
19
Typowe mechanizmy chwytaków tej grupy przedstawiono w tabl. 6. Zaletą tego typu
mechanizmów jest mniejsza liczba członów pośredniczących przy przenoszeniu napęd,
natomiast wadą – występowanie znacznych sił tarcia w parze kinematycznej IV klasy.
Tablica 5 Mechanizmy chwytaków zawierające pary kinematyczne IV i V klasy
Obecnie najczęściej stosuje się konstrukcje zawierające dwie pary kinematyczne IV
klasy i trzy pary V klasy. Bardzo istotny wpływ na prace chwytaka ma dokładność wykonania
pary kinematycznej IV klasy.
4.4. Układy wykonawcze chwytaków
Niniejsza część opracowania przedstawia różnorodność układów wykonawczych
chwytaków, przy czym charakter tego przedstawienia będzie ogólny i opisowy. Mnogość
przykładów chwytaków, z zastosowaniem opisanych układów wykonawczych, można znaleźć
w rozdziale kolejnym, pod tymże tytułem.
20
Elementem wykonawczym chwytaka są końcówki chwytne. W zależności od
zastosowania i możliwości, liczba może być różna, przy czym najczęściej stosuje się dwie,
przeciwległe, ruchome końcówki chwytne. Rzadziej stosuje się chwytaki z jedną nieruchomą
i jedną ruchomą końcówką chwytną, lub trzema końcówkami chwytnymi – przeznaczone
głownie do chwytania obiektów o owalnych kształtach. Ze względu na sposób oddziaływania
końcówek chwytnych na powierzchnię obiektu wyróżnia się chwytaki do chwytania:
•
za powierzchnię zewnętrzną obiektu manipulacji;
•
za powierzchnię zewnętrzną obiektu;
•
za powierzchnię zewnętrzną lub wewnętrzną.
Wyróżniamy trzy rodzaje końcówek chwytnych: sztywne, sprężyste i elastyczne.
Najczęściej stosowane są końcówki sztywne, które nie odkształcają się podczas chwytania
obiektu manipulacji.
Często zdarza się, iż specyficzne wymagania technologiczne, jak i występowanie
niekorzystnych
(…)
… linii produkcyjnej niemieckiej firmy spożywczej
produkującej rogaliki;
•
Pakowanie.mpg – prezentacja działającego systemu pakowania i segregowania pudeł;
•
Reklama.mpg – reklama telewizyjna firmy Microsoft z robotem lakierniczym do
karoserii samochodowych w jednej z ról.
Bibliografia
1. Barczyk J.: „Urządzenia chwytające robotów przemysłowych”, Robotyka nr 1/1986.
2. Honczarenko J.: „Roboty przemysłowe…
… elementów wykonawczych są końcówki elastyczne. Są one
wykonane ze specjalnie profilowanych elastomerów lub gumy zmieniających swój kształt pod
wpływem dostarczonej energii (sprężonego powietrza lub oleju).
Chwytaki tego typu są powszechnie stosowane dzięki swoim zaletom do których
można zaliczyć:
•
możliwość chwytania przedmiotów o delikatnych powierzchniach i o różnorodnych
kształtach;
•
możliwość budowania chwytaków z wieloma końcówkami chwytnymi, co zapewnia
dużą uniwersalność rozwiązań;
•
możliwość łatwego nastawiania wartości siły chwytu przez dobór ciśnienia
sprężonego powietrza;
•
niski koszt wykonania, prosty montaż i na ogół łatwa wymiana zużytych elementów.
Zastosowanie chwytaków z elastycznymi końcówkami ogranicza:
•
starzenie i szybkie zużywanie się elementów elastycznych;
•
brak…
... zobacz całą notatkę
Komentarze użytkowników (0)