To tylko jedna z 4 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę


Politechnika Wrocławska
Podstawy automatyki i robotyki
Sprawozdanie z laboratorium w sali 010
Robot stacjonarny IRB-6 firmy ABB
Robot składa się z 3 podstawowych elementów:
- manipulatora - ramienia,
- szafy sterowniczej
- pulpity sterowania.
Dodatkowo w laboratorium znajduje się
również urządzenie dodatkowe: pozycjoner automatyczny 2-osiowy.
IRB-6 jest robotem stacjonarnym o napędzie elektrycznym (silnik prądu zmiennego, moc zasilająca przekracza 74W). Masa robota to 225kg a szafy sterowniczej 300kg. Maksymalny udźwig robota to 5kg. Udźwig jest uzależniony od tego czy na końcu ramienia jest coś zamontowane, np. chwytak, wtedy maksymalny udźwig jest pomniejszony o wagę chwytaka.
Zasięg ramienia robota to 1,4 m, maksymalna prędkość osiągana przez koniec ramienia to ok 2 m/s, lecz w przypadku sterowania ręcznego jest ona ograniczona do 250 mm/s ze względów bezpieczeństwa.
Nominalna dokładność pozycjonowania to 0,04mm.
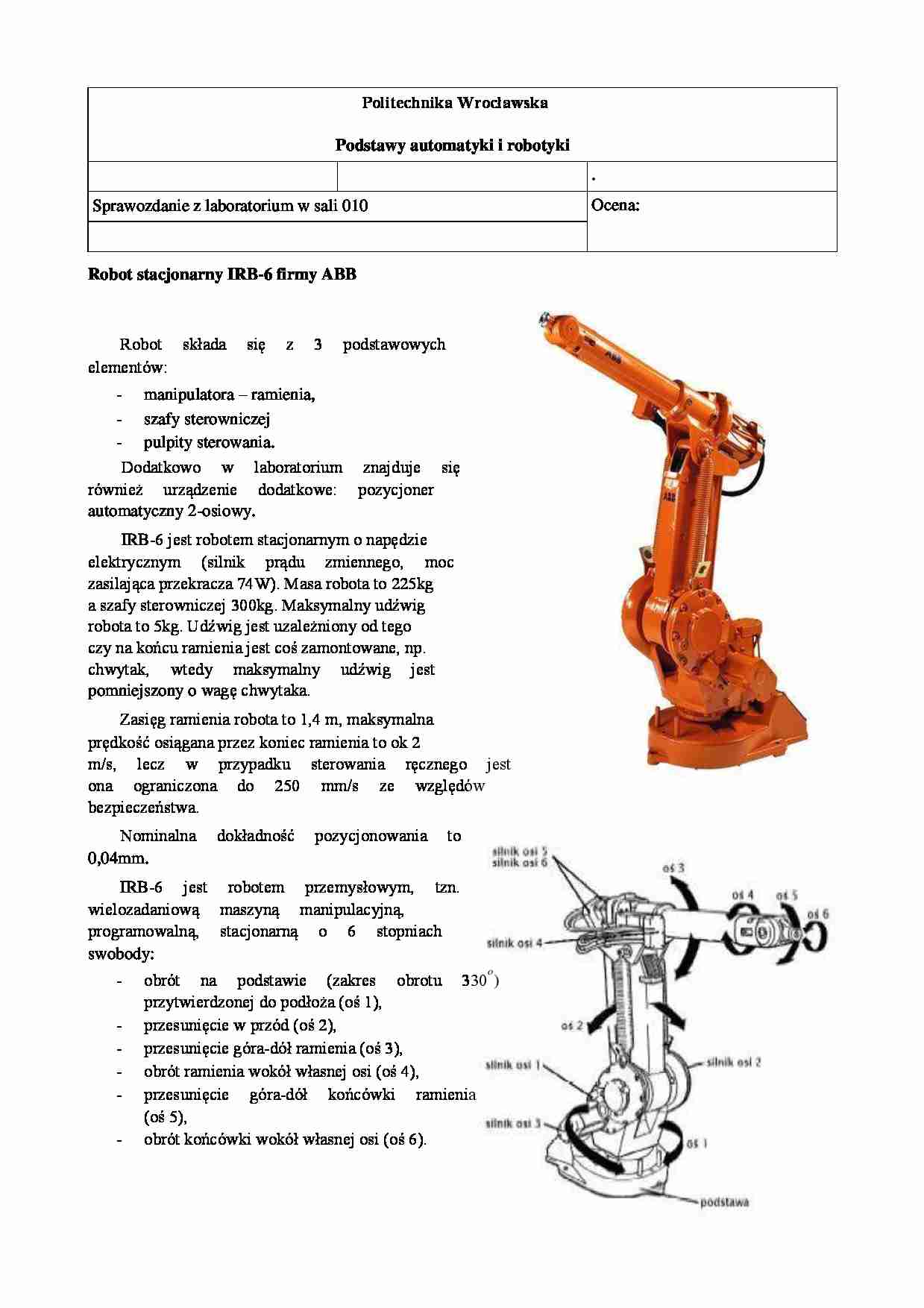
IRB-6 jest robotem przemysłowym, tzn. wielozadaniową maszyną manipulacyjną, programowalną, stacjonarną o 6 stopniach swobody:
- obrót na podstawie (zakres obrotu 330o) przytwierdzonej do podłoża (oś 1),
- przesunięcie w przód (oś 2),
- przesunięcie góra-dół ramienia (oś 3),
- obrót ramienia wokół własnej osi (oś 4),
- przesunięcie góra-dół końcówki ramienia (oś 5),
- obrót końcówki wokół własnej osi (oś 6).
.
Ocena:
Wszystkie przeguby robota są to przeguby V klasy, obrotowe, tak samo w pozycjonerze.
Układ sterowania robota jest oparty o układy mikroprocesorowe, w szafie sterowniczej znajdują się 3 komputery przemysłowe. Robota można programować online (za pomocą pulpitu sterowniczego) i offline (za pomocą PC).
Programowanie online polega na uczeniu robota kolejnych czynności poprzez wydawanie poleceń i zapisywanie ich w języku napisanym dla robota, znajomość języka nie jest konieczna do programowania, gdyż większość poleceń jest „wybieralna” z menu pulpitu sterowniczego. IRB-6
(…)
….
Właściwości wpływające na warunki uchwycenia obiektu to:
- masa,
- położenie środka ciężkości,
- moment bezwładności,
- kształt i parametry geometryczne,
- tolerancja wykonania miejsc uchwytu,
- odporność na naprężenia zewnętrzne.
Chwytaki obecne są zarówno w przemyśle, jak i w naszym codziennym otoczeniu. Wykorzystywane są w różnorodnych procesach technologicznych do przytrzymywania, pozycjonowania…
… zapisywania i uczenia robota, za pomocą manipulatora znajdującego się na pulpicie i przełączników osi.
Programowanie offline wymaga znajomości języka używanego przez robota i programu umożliwiającego pisanie w tym języku zainstalowanego na komputerze klasy PC. Zapisany program jest przenoszony do robota za pomocą dyskietki, której napęd znajduje się w szafie sterowniczej.
W zależności od zadań robota można na jego końcu umieszczać różne efektory. Klasyfikacja zadań:
- zadania manipulacji - polegają na przemieszczaniu w przestrzeni elementów, pozycjonowanie i orientowanie obiektu manipulacji, efektorem w tym przypadku jest chwytak,
- zadania i operacje technologiczne - robot jest wyposażony w efektor w postaci narzędzia lub głowicy narzędziowej (pistolet malarski, tarcza do polerowania, końcówkę spawalniczą
itp…
... zobacz całą notatkę
Komentarze użytkowników (0)