To tylko jedna z 20 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę

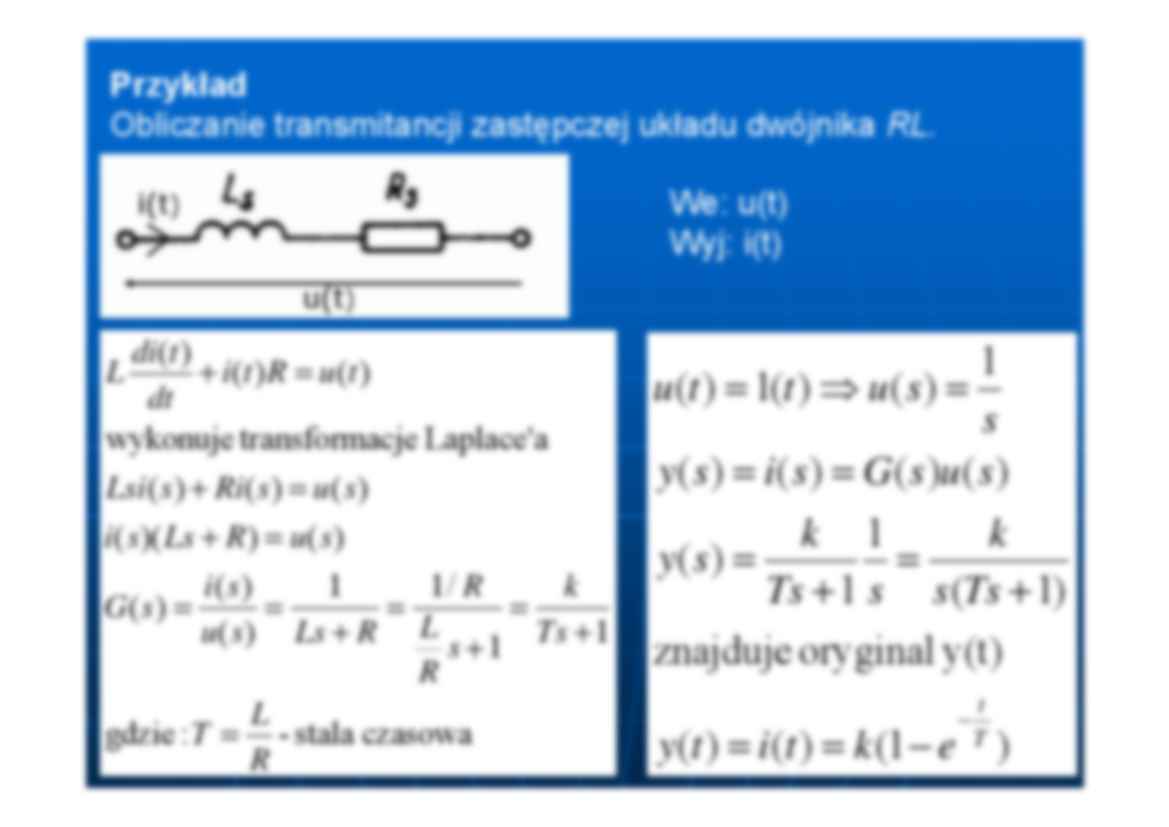
Wykład 3 • opis ukladu dynamicznego (charakterystyki statyczne, charakterystyki dynamiczne, opis w przestrzeni stanów) • podstawowe człony w automatyce Opis właściwości obiektu dynamicznego Równanie różniczkowe Transmitancja operatorowa G(s) y(s)=u(s)G(s) Charakterystyki Opis w przestrzeni stanów Charakterystyki dynamiczne Charakterystyki statyczne (w stanach ustalonych) Charakterystyki skokowe Charakterystyki częstotliwościowe G(jω) amplitudowo-fazowa amplitudowa fazowa logarytmiczna i in. Przykład Obliczanie transmitancji zastępczej układu dwójnika RL. u(t) i(t) We: u(t) Wyj: i(t) czasowa stala - : gdzie 1 1 / 1 1 ) ( ) ( ) ( ) ( ) )( ( ) ( ) ( ) ( a Laplace' acje transform wykonuje ) ( ) ( ) ( R L T Ts k s R L R R Ls s u s i s G s u R Ls s i s u s Ri s Lsi t u R t i dt t di L = + = + = + = = = + = + = + ) 1 ( ) ( ) ( y(t) oryginal znajduje ) 1 ( 1 1 ) ( ) ( ) ( ) ( ) ( 1 ) ( ) ( 1 ) ( T t e k t i t y Ts s k s Ts k s y s u s G s i s y s s u t t u − − = = + = + = = = = ⇒ = x=U(t) y=U c(t) R C Przykład Obliczanie transmitancji zastępczej układu dwój- nika RC. 1 1 ) ( ) ( ) ( ) ( ) 1 )( ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( u T, RC : gdzie ) ( ) ( ) ( ) ( ) ( ) ( ) ( C + = = = + = + = + = = = + ⎪⎩ ⎪ ⎨ ⎧ = = + Ts s u s y s G s u Ts s y s u s y s Tsy t u t y dt t dy T t y t t u t u dt du RC dt t du C t i t u t u t Ri C C C C T t C e t u t y Ts s s y s G s u s y s s u t t u − − = = + = = = ⇒ = 1 ) ( ) ( 1 1 1 ) ( ) ( ) ( ) ( 1 ) ( ) ( 1 ) ( Charakterystyka statyczna Charakterystyka statyczna przedstawia zależność wielkości wyjściowej od wielkości wejściowej w stanie ustalonym (niezmieniające się w czasie). Wartości ustalone wejścia i wyjścia oznaczymy: ) ( lim ), ( lim 0 0 t y y t x u t t ∞ → ∞ → = = 0 0 0 0 a b u y = Stan ustalony: w zapisie czasowym wszystkie „ pochodne = 0 ” w zapisie operatorowym wszy- stkie „ s = 0” 0 0 0 0 u a b y = Równanie stycznej dla elementów linearyzowanych, Punkt styczności = punkt pracy
(…)
… amplitudę, ω=2πf - pulsację, φ - fazę początkową
• Operator s w transformacie Laplace’a ma formę liczby zespolonej:
s = α + jω
• dla stanów ustalonych (przy wymuszeniach harmonicznych),operator s
przyjmuje jedynie wartości urojone a jego część rzeczywista się zeruje:
s = jω
• transmitancja widmowa, to stosunek transformaty ustalonej odpowiedzi
do transformaty wymuszenia harmonicznego
Y ( jω )
G ( jω…
… l x n,
D(t) – macierz transmisyjna układu stpnia l x k
Podstawowe człony w automatyce
• Podstawowe człony układów automatyki można podzielić ze względu
na ich właściwości dynamiczne na następujące grupy:
- proporcjonalne,
- inercyjne,
- całkujące,
- różniczkujące,
- oscylacyjne,
- opóźniające.
• Dowolny człon układu automatyki można scharakteryzować:
- równaniem i wykresem charakterystyki…
... zobacz całą notatkę
Komentarze użytkowników (0)