To tylko jedna z 7 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę
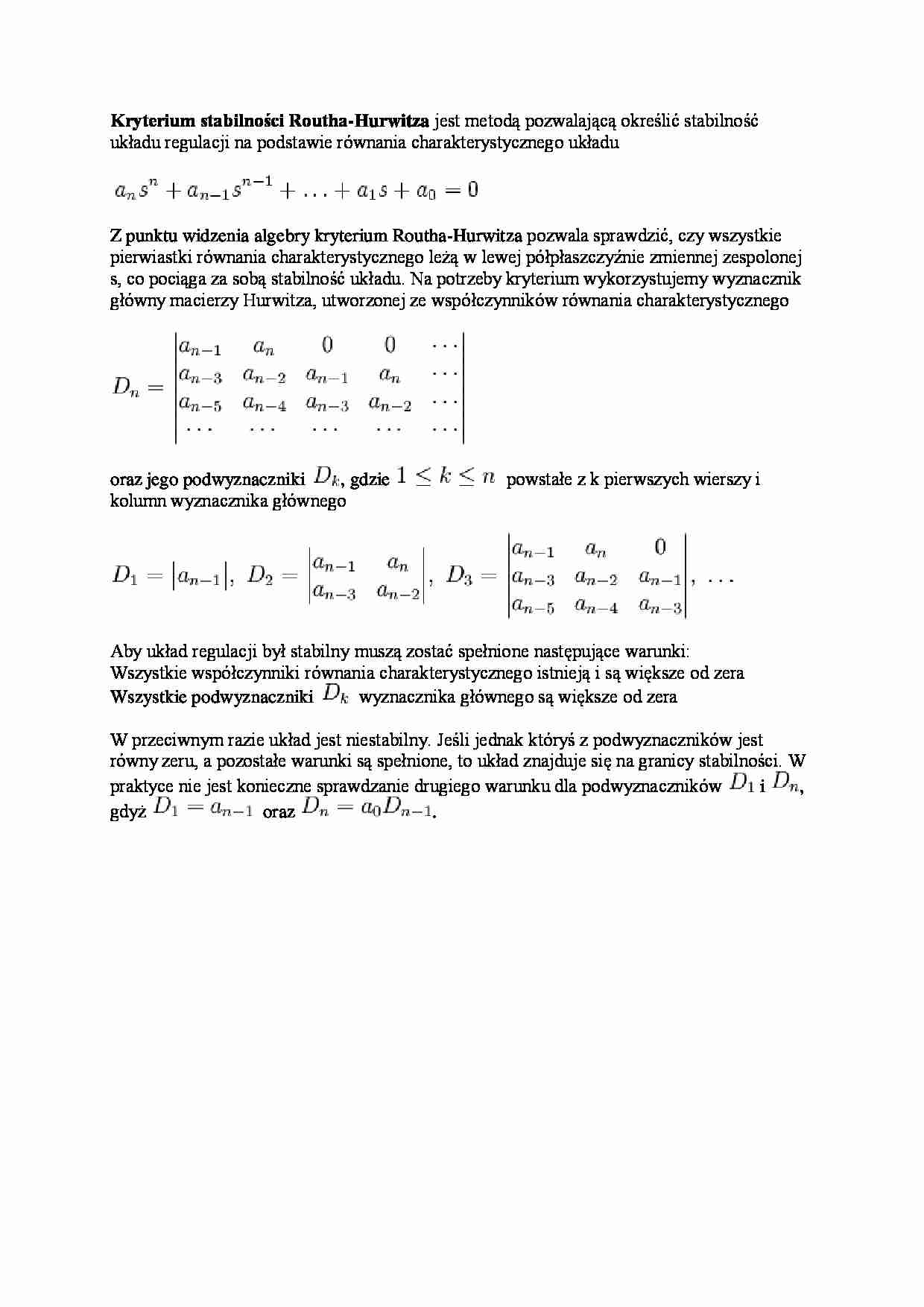


Kryterium stabilności Routha-Hurwitza jest metodą pozwalającą określić stabilność układu regulacji na podstawie równania charakterystycznego układu Z punktu widzenia algebry kryterium Routha-Hurwitza pozwala sprawdzić, czy wszystkie pierwiastki równania charakterystycznego leżą w lewej półpłaszczyźnie zmiennej zespolonej s, co pociąga za sobą stabilność układu. Na potrzeby kryterium wykorzystujemy wyznacznik główny macierzy Hurwitza, utworzonej ze współczynników równania charakterystycznego oraz jego podwyznaczniki , gdzie powstałe z k pierwszych wierszy i kolumn wyznacznika głównego Aby układ regulacji był stabilny muszą zostać spełnione następujące warunki: Wszystkie współczynniki równania charakterystycznego istnieją i są większe od zera Wszystkie podwyznaczniki wyznacznika głównego są większe od zera W przeciwnym razie układ jest niestabilny. Jeśli jednak któryś z podwyznaczników jest równy zeru, a pozostałe warunki są spełnione, to układ znajduje się na granicy stabilności. W praktyce nie jest konieczne sprawdzanie drugiego warunku dla podwyznaczników i , gdyż oraz . Linearyzacja ) ), ( ), ( ( t t u t x f t x ) ), ( ), ( ( (...) ) ), ( ), ( ( ) ), ( ), ( ( (...) 2 1 2 1 t t u t x f t t u t x f t t u t x f t x t x t x t x n n Funkcje ) ( t f n są nieliniowe, a ich argumentami są ) ( ); ( t u t x . r. sygnału wejściowego r. sygnału wyjściowego ) ); ( ( ) ( t t x g t u ) ); ( ); ( ( ) ( t t u t x h t y Jeżeli czas nie występuje w postaci (jawnej) )) ( ); ( ( t u t x f t x to mówimy o układzie autonomicznym. )) ( ); ( ( t u t x f t x //układ autonomiczny 0 ; 0 u x Rozwijamy ten układ w otoczeniu x=0 u=0 kot u x u x f t u u f t x x f t x x ]
(…)
….
Układ otwarty powstaje poprzez rozcięcie pętli sprzężenia zwrotnego (przed węzłem
sumującym). W tym układzie sterowanie nie zapewnia nam odtwarzanie ścieżki.
Regulator należy do toru głównego (bez elementów sprzężenia zwrotnego).
Układy liniowe to takie dla których spełniona jest zasada superpozycji i są opisane linowymi
równaniami różniczkowanymi.
Odpowiedź układu jest równa sumie odpowiedzi…
… Gob ( s)GR ( s) 1 Go ( s)
Transmitancja układu zamkniętego…
Stopień mianownika układu zamkniętego wynosi n.
Stopień licznika układu otwartego jest identyczny jak w liczniku układu zamkniętego.
Układ regulacji automatycznej nazywamy stabilnym jeżeli ograniczonemu sygnałowi na
wejściu odpowiada ograniczony sygnał na wyjściu tego układu (amplituda sygnału na wy nie
rośnie)
Transmitancją widmową nazywamy iloraz wartości zespolonej układu wywołany
wymuszeniem sinusoidalnym w stanie ustalonym do wartości zespolonej tego wymuszenie
Gob ( y0 ) Gob (s) | s j
Po zaniku w układzie procesów przejściowych, gdy wymuszenie = 0
u(t ) A cos t A sin 2ft
Dla układu liniowego zachodzi właściwość, sygnał sinusoidalnie zmienny jest przenoszony
przez układ.
Transformacja LaPlace’a
[ A sin t ] A
U (s)
s 2
sin( ) cos( )
[ B sin(t y )] B
P( s)
s2 2
P( s ) B sin cos
Gob ( s )
U (s) A
B
Gob ( s ) e j
A
2
Zapas modułu określa wartość o jaką musiałoby osiągnąć wzmocnienie przy niezmienionym
argumencie układu otwartego aby układ zamknięty znalazł się na granicy stabilności.
Zapas fazy określa wartość zmiany argumentów transmitancji układu otwartego przy
niezmienionym wzmocnieniu, która doprowadziłaby do granicy stabilności.
Podstawowe parametry:
1)częstotliwość graniczna modułu m | G0 ( jm) | 1
2)częstotliwość fazy 0 (a) arg G0 ( jm ) 180 dla której faza = 180
Odchylenie charakterystyki fazowej układu otwartego o wartości - 180 dla częstotliwości m
jest zwana zapasem fazy.
Odchylenie charakterystyki amplitudowej od 0 dB…
... zobacz całą notatkę
Komentarze użytkowników (0)