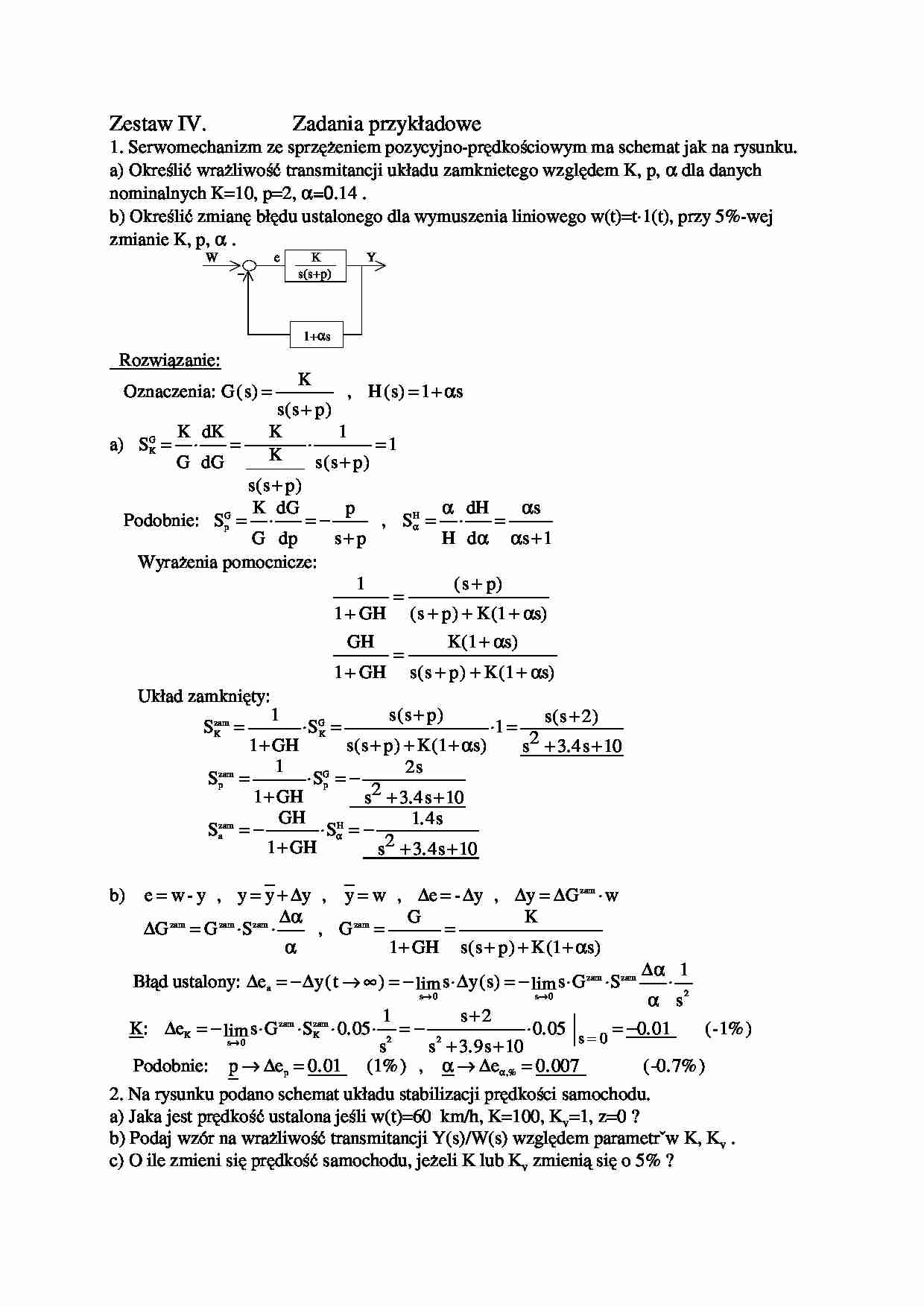
Zestaw IV. Zadania przykładowe 1. Serwomechanizm ze sprz ę eniem pozycyjno-prędkościowym ma schemat jak na rysunku. a) Okre ślić wra liwość transmitancji układu zamknietego względem K, p, α dla danych nominalnych K=10, p=2, α=0.14 . b) Okre ślić zmianę błędu ustalonego dla wymuszenia liniowego w(t)=t⋅1(t), przy 5%-wej zmianie K, p, α . W e K s(s+p) 1+ αs Y _ Rozwi ązanie: Oznaczenia: G s H s ( ) = K s(s+ p) , ( ) = 1+ s α a) S K G dK dG K K s s p s s p K G = ⋅ = + ⋅ + = ( ) ( ) 1 1 Podobnie: S K G dG dp p s p S H dH d s s p G = ⋅ = − + = ⋅ = + , H α α α α α 1 Wyra enia pomocnicze: 1 1 + GH GH 1 + GH = + + + + = + + + + ( ) ( ) ( ) ( ) ( ) ( ) s p s p K s K s s s p K s 1 1 1 α α α Układ zamkni ęty: S GH S s s p s s p K s s s s s K zam K G = + ⋅ = + + + + ⋅ = + + + 1 1 1 1 2 2 3 4 10 ( ) ( ) ( ) ( ) . α S GH S s s s p zam p G = + ⋅ = − + + 1 1 2 2 3 4 10 . S GH GH s s s a zam = − + ⋅ = − + + 1 1 4 2 3 4 10 S H α . . b) e y y y y G w zam = w - y , = y , y = w , e = - , + = ⋅ ∆ ∆ ∆ ∆ ∆ ∆ ∆ G G S , G zam zam zam zam = ⋅ ⋅ = + = + + + α α α G GH K s s p K s 1 1 ( ) ( ) Bł ąd ustalony: ∆ ∆ ∆ ∆ e a = − → ∞ = − ⋅ = − ⋅ ⋅ ⋅ → → y t s y s s G S s s s zam zam ( ) lim ( ) lim 0 0 2 1 α α K e (-1% ) K : lim . . . . ∆ = − ⋅ ⋅ ⋅ ⋅ = − + + + ⋅ = − → = s zam K zam s G S s s s s s 0 2 2 0 05 1 2 3 9 10 0 05 0 01 0 Podobnie: p (1% ) , (-0.7% ) → = → = ∆ ∆ e e p 0 01 0 007
(…)
…
25 + 6p - 4K - Kz = 0
25 p − 4 Kz = 0
s→ 0
R
|
S
|
T
→
rozwiązujac
K=
106
17
otrzymuje sie
( Biorąc KZ jako nową zmienną mamy układ)
, z=
25
106
, p=
4
17
w(t ) = t 3 ⋅ 1( t )
→ W(s) =
6
s
s
e u = lim s ⋅ E ( s) = lim s ⋅
s→ 0
s→ 0
4
4
(s +
3
⋅
6
)( s + 6s + 25) s
2
4
=
102
= 1. 02
100
17
5. Regulator PI steruje programowo ciśnieniem prasy hydraulicznej. Początkowo ciśnienie
narasta liniowo…
…
,
1+ G otw ( s)
jednak prościej jest skorzystać ze wzorów na Kp i KV.
6. Prosty serwomechanizm z silnikiem prądu stałego, z magnesem trwałym, ma schemat jak
na rysunku. Prędkość obrotowa dla U=10V wynosi 1000obr/min, stała czasowa 0.5sek.
Oczekuje się, aby x narosło liniowo o 10cm w ciągu 15sek. Jaki będzie faktyczny przebieg?
R
W
x
wtórnik
R
+
_
25cm-skala
U
0.1U
R
pręt nagwintowany z
nakrętką 1mm/obrót
S
S N
Y
xw
10cm
potencjometr suwakowy
10V-25cm
R
15sek
10V
Rozwiązanie:
100
Ω (s)
1000 obr
sek
60
Potencjometr: 10V → 25cm
czyli
Silnik: U = 10V → ω =
silnik
w
_
sum./wzm.
10
[V]
[V]
ω
100/ε0
0.5s+1 [ obr ]
sek
L sek O
obr
M P
M P
0.5s + 1 N V Q
M P
E(s) = X w − X =
1cm
ok.15sek.
U(s)
1cm → 0.4V
[V]
0.4 [cm]
potencj.
4
X(s)
5
3
cm
= 0. 4 ⋅ ⋅
cm
4
X w ( s) 1 2 32 2
s + 2s +
3
1
lub
s2 + 2 s
s2 + 2…
…) silnik: PN=100W, UN=24V, ω=3000obr/min, J=5*10-5 kg*m2, (2)
t
tachogenerator: 3000obr/min → 5V, (3) polaryzacja: Up=5V, (4) przekładnia: α=0.1, (5)
potencjometr: 1-obrotowy (360o).
+Up
+
_
w
+
_
r
N
α
_ TG
S
+
β
S
I
a) Sporządzić schemat blokowy układu.
b) Dobrać tak r i β, aby układ zamknięty miał transmitancję 1/((Ts+1)2) gdzie T=0.2sek.
c) Ile wynosi wra liwość SJzam dla ω=0, 0.1/T, 1/T ?
d) J zmieniło się o 10%. Jak zmieni się odpowiedź układu na skok jednostkowy ?
Rozwiązanie:
ad a)
100
= 4 . 167 A
24
100
PN = M em,N ⋅ ω N → M em,N =
= 0. 318 Nm
1
3000 ⋅ ⋅ 2 π
60
0. 318
M em, N = k s ⋅ i N → k s =
= 0. 0763 Nm
A
4 . 167
silnik: PN = i N U N → i N =
5
= 0. 0159 V
rd
1
3000 ⋅ 2 π
s
60
Up
5 V
=
Θ M 1⋅ 2 π rd
tachogenerator: k TG =
potencjometr:
w
_
1
r [n] ks
_
1
Is
1
s
Up
θM
α
Y
[V]
β k TS…
… = G zam ⋅ S J ⋅ W( s) ⋅
A A
1
s
0. 1s2
=−
0.1 (10%)
(
1
s + 1) 2 ⋅ ( s + ω n ) 2
ωn
⋅
1
s
8. Rezystor R stabilizuje temperaturę τ w bojlerze elektrycznym, włączając stycznik podający
napięcie UM=220V na 10-cio spiralowy grzejnik. Włączenie następuje z cyklem Tc (np. 5
min.), a regulator w ka dym cyklu wyznacza czas Tcu(t), u∈〈0,1〉, na ktˇry stycznik jest
włączany. Mamy więc do czynienia z modulacją…
…
a) Ile wynosi oporność grzejnika R ? Podać transmitancję obiektu.
b) Jak wygląda schemat blokowy układu ?
c) Przyjmując, e regulator jest typu P dobrać kp tak, aby stała czasowa układu zamkniętego
była 10-krotnie mniejsza ni stała czasowa obiektu.
d) Jedna ze spiral przepaliła się. Jak wpłynie to na temperaturę ustaloną ? Jaki będzie przebieg
przejściowy ?
e) Powtórzyć punkty c, d biorąc regulator PI…
…
30ε - 25 - 302
s1 :
12 ε − 10
0
s:
15
s2 :
6-
15
Uwaga: Przy wielomianach z "e" mo¿na w tablicy Routha pozostawiæ od razu dominuj¹ce
sk³adniki. Upraszcza to zapis. Tutaj:
s5 :
1
3
s4 :
6
s3 :
ε
15
5
2
s2 :
5
ε
5
2
15
s1 :
s0 :
10
15
Odp. 2 pierwiastki w lewej pó³p³aszczyŸnie (dwie zmiany znaku).
MATLAB: roots([1 2 3 6 10 15 ])
0.82±j1.8, -1.8, -0.9±j1.36
9. Zbadaæ stabilnoœæ wielomianu:
MATLABem]
s6…
... zobacz całą notatkę


Komentarze użytkowników (0)