To tylko jedna z 29 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę
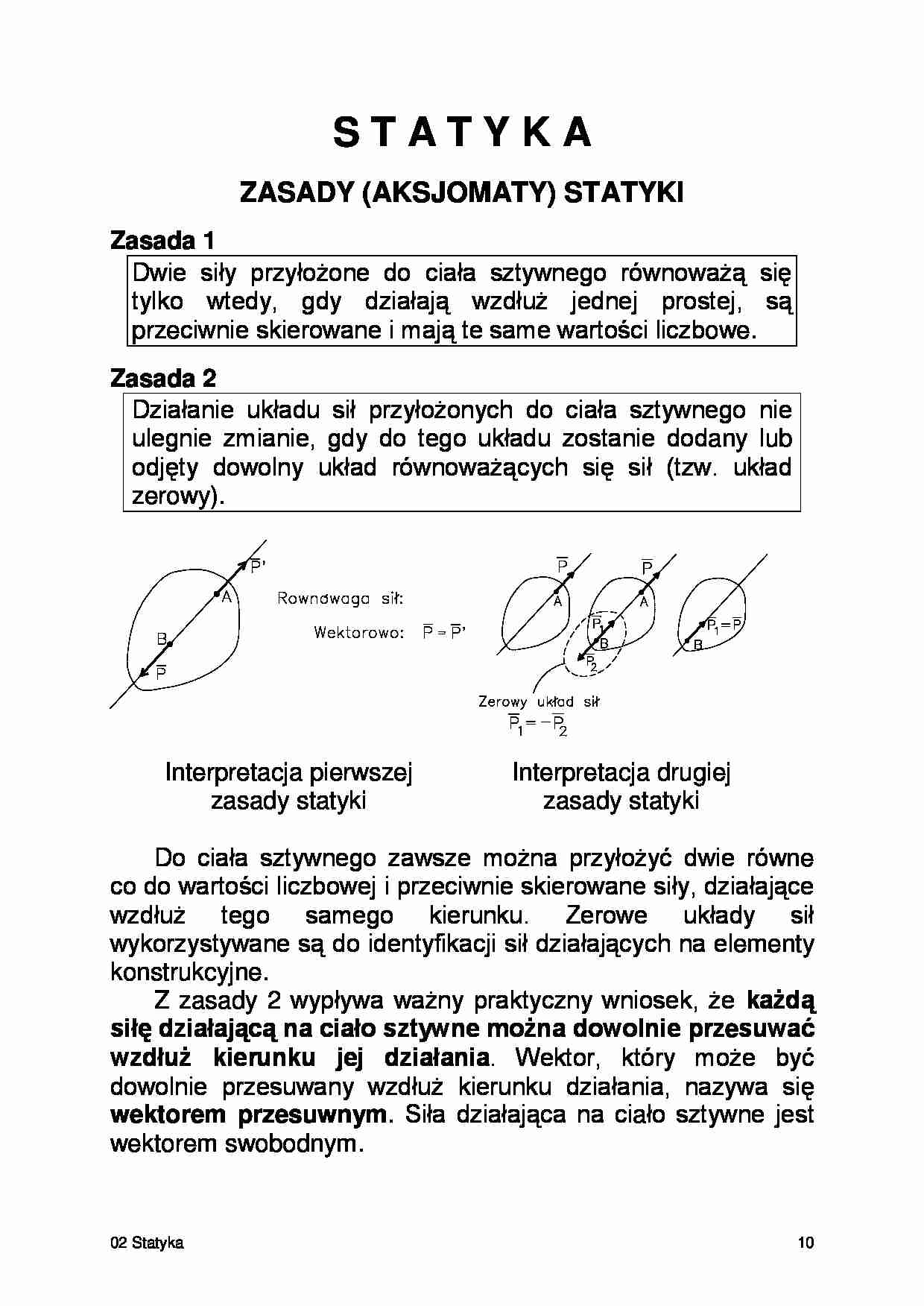


02 Statyka 10 S T A T Y K A ZASADY (AKSJOMATY) STATYKI Zasada 1 Dwie siły przyłożone do ciała sztywnego równoważą się tylko wtedy, gdy działają wzdłuż jednej prostej, są prze ciwnie skierowane i mają te same wartości liczbowe. Zasada 2 Działanie układu sił przyłożonych do ciała sztywnego nie ulegnie zmianie, gdy do tego układu zostanie dodany lub odjęty dowolny układ równoważących się sił (tzw. układ zerowy). Interpretacja pierwszej zasady statyki Interpretacja drugiej zasady statyki Do ciała sztywnego zawsze można przyłożyć dwie równe co do wartości liczbowej i przeciwnie skierowane siły, działające wzdłuż tego samego kierunku. Zerowe układy sił wykorzystywane są do identyfikacji sił działających na elementy konstrukcyjne. Z zasady 2 wypływa ważny praktyczny wniosek, że każdą siłę działającą na ciało sztywne można dowolnie przesuwać wzdłuż kierunku jej działania . Wektor, który może być dowolnie przesuwany wzdłuż kierunku działania, nazywa się wektorem przesuwnym . Siła działająca na ciało sztywne jest wektorem swobodnym. 02 Statyka 11 Zasada 3 (zasada równoległoboku) Dowolne dwie siły 2 1 P i P , przyłożone do jednego punktu, można zastąpić siłą wypadkową R przyłożoną do tego punktu i przedstawioną jako wektor będący przekątną równoległoboku ABCD zbudowanego na wektorach sił w sposób pokazany na rysunku. Moduł wypadkowej R można obliczyć z zależności: cos 2 2 2 1 2 2 2 1 P P 2 P P R R , gdzie – kąt między siłami P1 i P2. Po zastosowaniu do trójk ątów ABD i ACD twierdzenia sinusów otrzymuje się: . sin sin , sin sin R P R P 1 2 Wyznaczanie wypadkowej R, gdy są znane P1 i P2 oraz kąt , jest nazywane zadaniem prostym . Zasada równole głoboku pozwala równie ż rozwiązać zadanie odwrotne : rozłożyć daną siłę P na dwie składowe o znanych kierunkach działania, przecinających się w punkcie przyłożenia siły P i leżących z nią w jednej płaszczyźnie. Dla znanych P, i korzysta się wówczas ze wzorów:
(…)
… r P .
Wektorowo:
Skalarnie:
M0 = P h
(h – ramię).
Znak momentu: reguła prawej dłoni.
Jednostka momentu: [M0] = Nm (niuton razy metr)
ANALITYCZNE WYZNACZANIE MOMENTU:
Y
P
y
P
y
A(x, y)
h
P
x
X
O
x
M 0 Py x Px y P h
Moment siły względem punktu jest równy zeru, gdy:
siła jest równa zeru,
linia działania siły przechodzi przez dany punkt (ramię=0).
02 Statyka
18
PARA SIŁ, MOMENT PARY SIŁ
Założenie: P1 = P2
P
2
P
2
P
1
P
1
a
Para sił
Zerowy układ sił
Układ dwóch sił równoległych, skierowanych
w przeciwnych kierunkach, o równych modułach,
nazywa się PARĄ SIŁ.
Odległość między siłami – ramię pary sił.
Siły tworzące parę nie mają wypadkowej (P1 = P2),
ale i nie równoważące się, gdyż nie działają wzdłuż
jednego kierunku – nie są zerowym układem sił.
Niezrównoważona para sił działając
na ciało sztywne powoduje jego obrót.
MOMENT PARY SIŁ – wektor, którego wartość
bezwzględna (moduł) równa jest iloczynowi wartości
liczbowej jednej z sił pary oraz ramienia tej pary: M = Pa.
Z
M
P
0
P
a
02 Statyka
19
Moment sił tworzących parę
względem dowolnego punktu:
O
P
h2
P
h1
90
0
a
M O P h1
M P h 2
O
M O M P h1 P h 2 P ( h1 h 2 ) P a M.
O
Suma momentów sił tworzących parę względem
dowolnego punktu płaszczyzny w której leży para sił,
równa jest MOMENTOWI DANEJ PARY SIŁ.
RÓWNOWAŻNE UKŁADY SIŁ
Równoważne układy sił to układy, które wywierają
jednakowe działania na ciała sztywne.
WYPADKOWA – siła równoważna układowi sił.
Pary sił o tej samej płaszczyźnie działania
i o równych momentach są sobie równoważne.
Ponieważ wywierają na ciało sztywne
jednakowe…
… momentów względem osi X oraz Z otrzymuje się
yc
P y
P
i
i
zc
i
P z
P
i
i
i
Punkt C – środek sił równoległych.
Siły Pi – siły ciężkości ŚRODEK CIĘŻKOŚCI CIAŁĄ
CIĘŻAR WŁAŚCIWY:
[]
N
.
m3
Ciężar = masa przyspieszenie ziemskie g.
g .
GĘSTOŚĆ CIAŁA: []
kg
.
m3
PRZYPADKI SZCZEGÓLNE
–
–
–
–
Środek ciężkości brył.
Środek ciężkości powierzchni.
Środek ciężkości figur płaskich.
Środek…
... zobacz całą notatkę
Komentarze użytkowników (0)