To tylko jedna z 2 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę

Krzysztof Koz_owski. Notatka składa się z 2 stron.
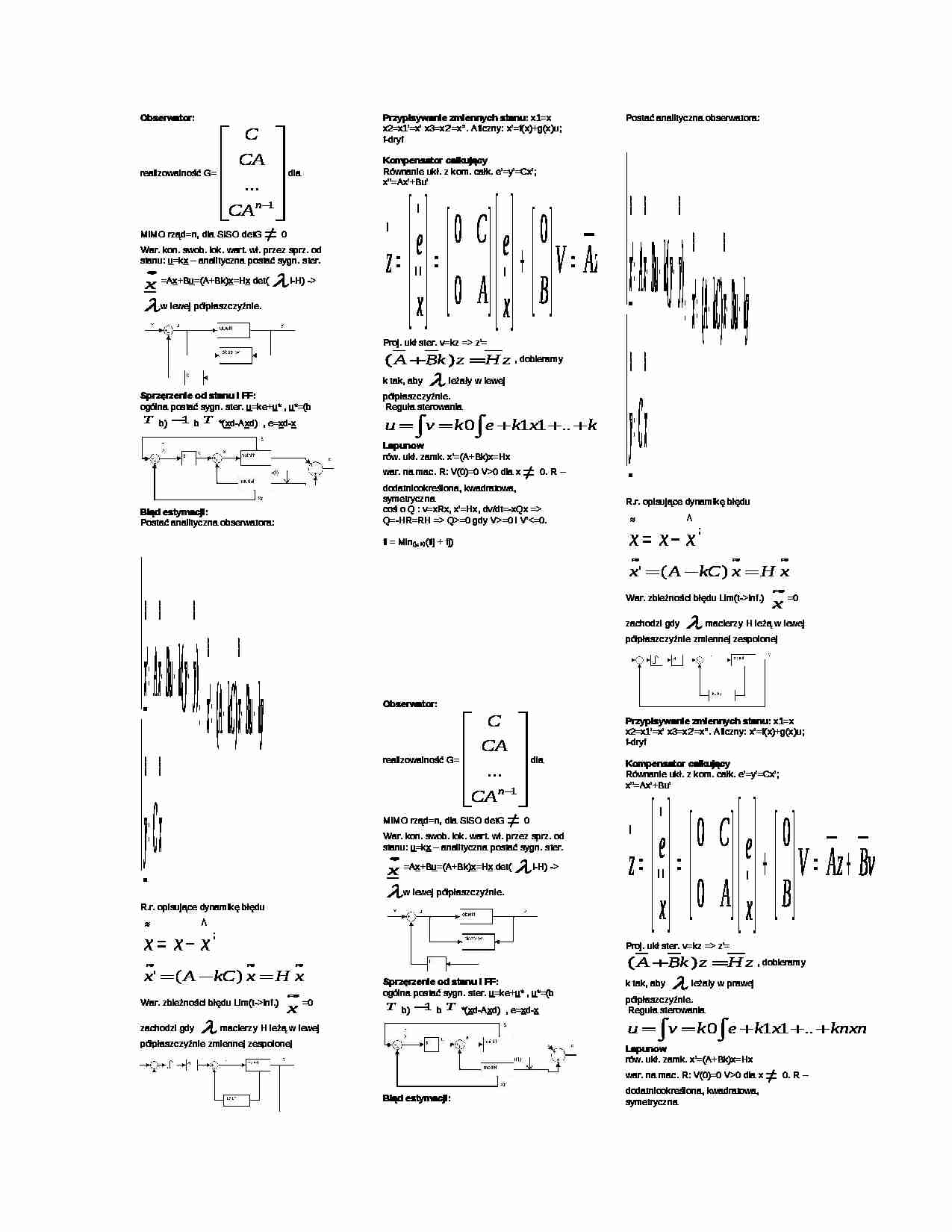
Obserwator: realizowalność G= dla MIMO rząd=n, dla SISO detG 0
War. kon. swob. lok. wart. wł. przez sprz. od stanu: u =k x - analityczna postać sygn. ster. =A x +B u =(A+Bk) x =H x det( I-H) - w lewej półpłaszczyźnie. Sprzęrzenie od stanu i FF: ogólna postać sygn. ster. u =ke+ u * , u *=(b b) b *( x d-A x d) , e= x d- x Błąd estymacji: Postać analityczna obserwatora: R.r. opisujące dynamikę błędu ; War. zbieżności błędu Lim(t-inf.) =0 zachodzi gdy macierzy H leżą w lewej półpłaszczyźnie zmiennej zespolonej
Przypisywanie zmiennych stanu: x1=x x2=x1'=x' x3=x2'=x''. Aficzny: x'=f(x)+g(x)u; f-dryf
Kompensator całkujący Równanie ukł. z kom. całk. e'=y'=Cx'; x''=Ax'+Bu' Proj. ukł ster. v=kz = z'= , dobieramy k tak, aby leżały w lewej półpłaszczyźnie.
Reguła sterowania Lapunow rów. ukł. zamk. x'=(A+Bk)x=Hx
war. na mac. R: V(0)=0 V0 dla x 0. R - dodatniookreślona, kwadratowa, symetryczna
coś o Q : v=xRx, x'=Hx, dv/dt=-xQx = Q=-HR=RH = Q=0 gdy V=0 i V' w lewej półpłaszczyźnie. Sprzęrzenie od stanu i FF: ogólna postać sygn. ster. u =ke+ u * , u *=(b b) b *( x d-A x d) , e= x d- x Błąd estymacji: Postać analityczna obserwatora: R.r. opisujące dynamikę błędu ; War. zbieżności błędu Lim(t-inf.) =0 zachodzi gdy macierzy H leżą w lewej półpłaszczyźnie zmiennej zespolonej
Przypisywanie zmiennych stanu: x1=x x2=x1'=x' x3=x2'=x''. Aficzny: x'=f(x)+g(x)u; f-dryf
Kompensator całkujący Równanie ukł. z kom. całk. e'=y'=Cx'; x''=Ax'+Bu' Proj. ukł ster. v=kz = z'= , dobieramy k tak, aby leżały w prawej półpłaszczyźnie.
Reguła sterowania Lapunow rów. ukł. zamk. x'=(A+Bk)x=Hx
war. na mac. R: V(0)=0 V0 dla x 0. R - dodatniookreślona, kwadratowa, symetryczna
coś o Q : v=xRx, x'=Hx, dv/dt=-xQx = Q=-HR=RH = Q=0 gdy V=0 i V'
... zobacz całą notatkę
Komentarze użytkowników (0)