

Fragment notatki:
1. Wprowdzenie
We współczesnych robotach stosowane są w zasadzie trzy rodzaje siłowników, a
mianowicie: pneumatyczne, hydrauliczne i elektryczne oraz ich kombinacje. Każdy robot jest
wyposażony w układ siłowników rozmieszczonych odpowiednio na ramionach robota lub w
jego połączeniach ruchowych, tworząc napęd robota.
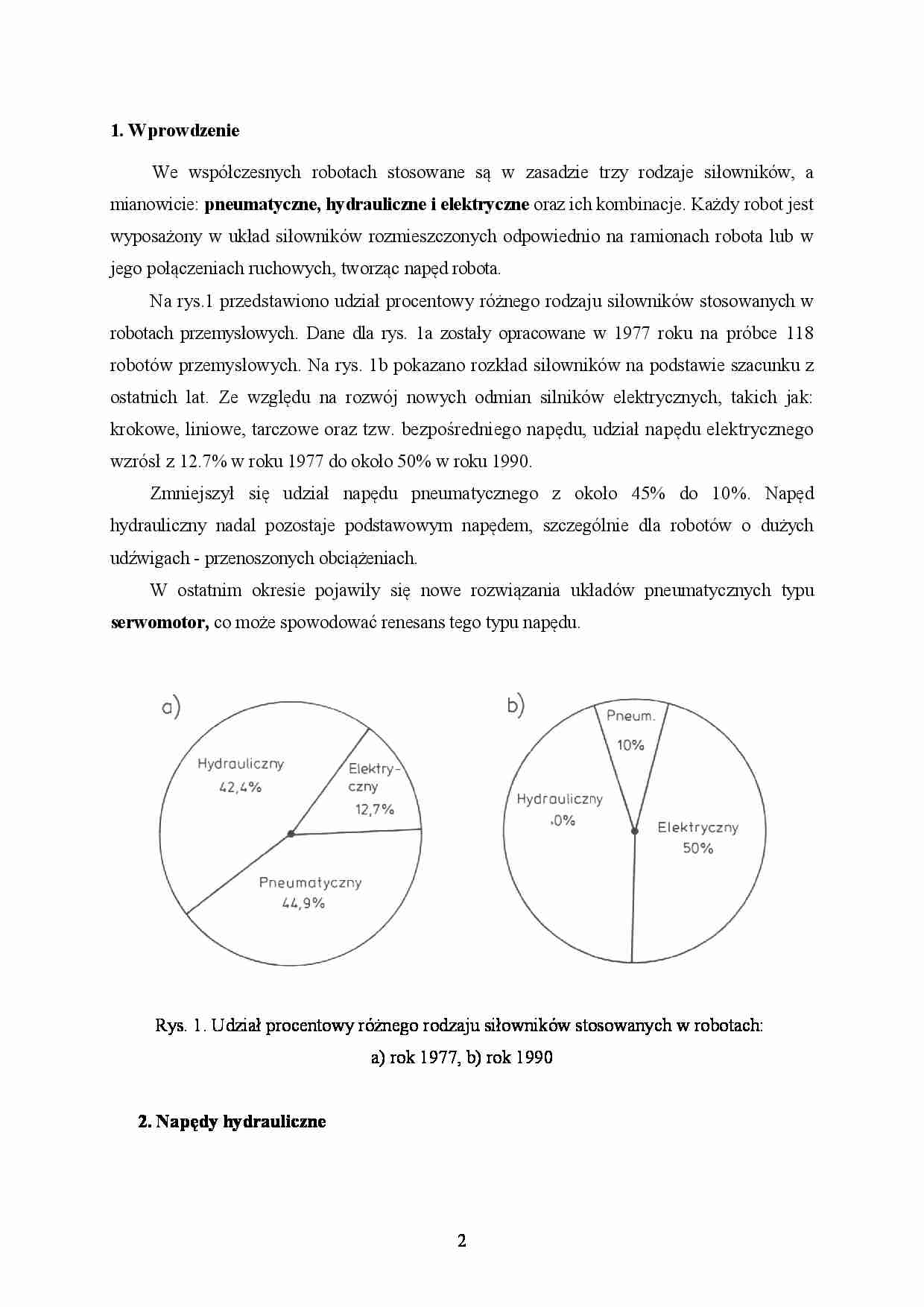
Na rys.1 przedstawiono udział procentowy różnego rodzaju siłowników stosowanych w
robotach przemysłowych. Dane dla rys. 1a zostały opracowane w 1977 roku na próbce 118
robotów przemysłowych. Na rys. 1b pokazano rozkład siłowników na podstawie szacunku z
ostatnich lat. Ze względu na rozwój nowych odmian silników elektrycznych, takich jak:
krokowe, liniowe, tarczowe oraz tzw. bezpośredniego napędu, udział napędu elektrycznego
wzrósł z 12.7% w roku 1977 do około 50% w roku 1990.
Zmniejszył się udział napędu pneumatycznego z około 45% do 10%. Napęd
hydrauliczny nadal pozostaje podstawowym napędem, szczególnie dla robotów o dużych
udźwigach - przenoszonych obciążeniach.
W ostatnim okresie pojawiły się nowe rozwiązania układów pneumatycznych typu
serwomotor, co może spowodować renesans tego typu napędu.
Rys. 1. Udział procentowy różnego rodzaju siłowników stosowanych w robotach:
a) rok 1977, b) rok 1990
2. Napędy hydrauliczne
2
Napęd hydrauliczny, pomimo wzrostu zastosowania napędu elektrycznego, pozostaje
nadal jednym z podstawowych napędów, szczególnie tam, gdzie chodzi o szybkie
przemieszczanie przy znacznych obciążeniach robota.
Jeśli dla przykładu weźmiemy pod uwagę siłownik hydrauliczny o powierzchni
użytkowej tłoka 50 cm zasilany ze źródła energii hydraulicznej o ciśnieniu 21.0 MPa, to przy
ciśnieniu 14.0 MPa uzyskuje się na wyjściu siłownika siłę 70 000 N.
Krótki czas rozruchu (od kilkudziesięciu milisekund do 1 s) uwidacznia korzyść ze
stosowania napędu hydraulicznego.
Rozpowszechnienie tych napędów jest spowodowane takimi ich zaletami jak:
łatwość uzyskiwania dużych sił przy małych rozmiarach i ciężarach urządzeń;
łatwość precyzyjnego sterowania położenia elementu wykonawczego;
bardzo dobre właściwości dynamiczne. Małe momenty bezwładności części ruchomych
sprawiają, że siłowniki hydrauliczne odznaczają się bardzo dużą prędkością działania;
łatwość uzyskiwania ruchów jednostajnych;
możliwość
uzyskania
małych
prędkości
ruchu
elementu
wykonawczego
bez
konieczności stosowania przekładni;
mała wrażliwość na zmiany obciążenia i przeciążenia, łatwość zabezpieczenia przed
przeciążeniami;
łatwość konserwacji (samoczynne smarowanie) i prostota użytkowania;
duża pewność ruchowa.
Do wad napędów hydraulicznych należy:
duży hałas wytwarzany przez pompę;
zanieczyszczenia wywołane ewentualnym wyciekiem oleju.
W skład napędów hydraulicznych wchodzą:
elementy
wykonawcze
(siłowniki)
sprzęgnięte
bezpośrednio
z
ramionami
manipulatorów;
elementy sterujące: wzmacniacze i przełączniki sterujące strumieniem (natężeniem
przepływu) i kierunkiem przepływu cieczy roboczej;
źródło przepływu, którym jest pompa
(…)
… z przekładnią zębatą ma niską prędkość obrotową i stały moment siły
przy stałym ciśnieniu.
7
Rys. 7. Siłownik wahadłowy [w położeniu pokazanym na rysunku ruch obrotowy jest
zablokowany] (firma Rexroth Sigma)
Rys. 8. Siłownik z równoległymi tłokami (firma Rexroth Sigma)
Na rys. 9 pokazano prostą odmianę konstrukcyjną siłownika hydraulicznego ze stałymi
łopatkami. Łopatka ruchoma jest dołączona do wyjściowego trzpienia i może się obracać.
Zakres ruchu jest mniejszy niż 2π rad (wynosi ok. 11π/6 rad). Zdwojony układ łopatek
umożliwia zakres ok. 5π/6 rad, ale moment siły jest dwukrotnie większy przy tych samych
wymiarach zewnętrznych. Wirujący tłok ma mniejszą bezwładność i tarcie w porównaniu do
liniowego tłoka. Można je wykorzystywać dla przypadku, gdy stosunek mocy do masy jest
duży i kiedy napęd bezpośrednio…
…
do przemieszczenia kątowego w m3/rad, maksymalnej
prędkości kątowej, znamionowego momentu siły oraz charakterystyk pokazanych na rys. 11.
10
Rys. 11. Charakterystyka silnika łopatkowego
2.3. Rozdzielniki hydrauliczne
Zadaniem rozdzielnika hydraulicznego jest skierowanie strumienia cieczy do
określonego miejsca obwodu hydraulicznego (najczęściej do jednej z komór siłownika lub
silnika hydraulicznego). Rozdzielniki…
…
elektrycznie
w
wykonaniu firmy Rexroth oraz jego symbol graficzny, przy czym aby porównać wykonanie
11
elektromagnesów umieszczono po lewej stronie elektromagnes 1 prądu przemiennego
pracujący w powietrzu, a po prawej stronie elektromagnes 2 prądu stałego również pracujący
w powietrzu (produkowane seryjnie rozdzielniki hydrauliczne mają jednakowe elektromagnesy). Przez przyłożenie napięcia do cewki…
…, przy czym ciecz z tej komory, która w wyniku ruchu
tłoka zmniejszy swoją objętość, zostaje poprzez wzmacniacz hydrauliczny tłoczkowy
wprowadzona do zbiornika cieczy roboczej. Ciecz robocza jest tłoczona do wzmacniacza
hydraulicznego
pompą
napędzaną
indukcyjnym
silnikiem
elektrycznym.
Przed
wprowadzeniem cieczy roboczej do wzmacniacza hydraulicznego przechodzi ona przez filtr
zaopatrzony w manometr. Filtr…
… od szerokości okien
oraz istnieniem oporów tarcia statycznego tłoków. Istnienie tej nieczułości doprowadza
17
do powstania pętli histerezy. Ze względu na jej szkodliwość przy sterowaniu położeniem
ramion manipulatora oraz całkujący charakter siłownika obejmuje się zwykle zespół
składający
się
z
wzmacniacza
elektrohydraulicznego
oraz
siłownika
ujemnym
sprzężeniem zwrotnym od położenia tłoka lub łopatki…
... zobacz całą notatkę
Komentarze użytkowników (0)