To tylko jedna z 9 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę
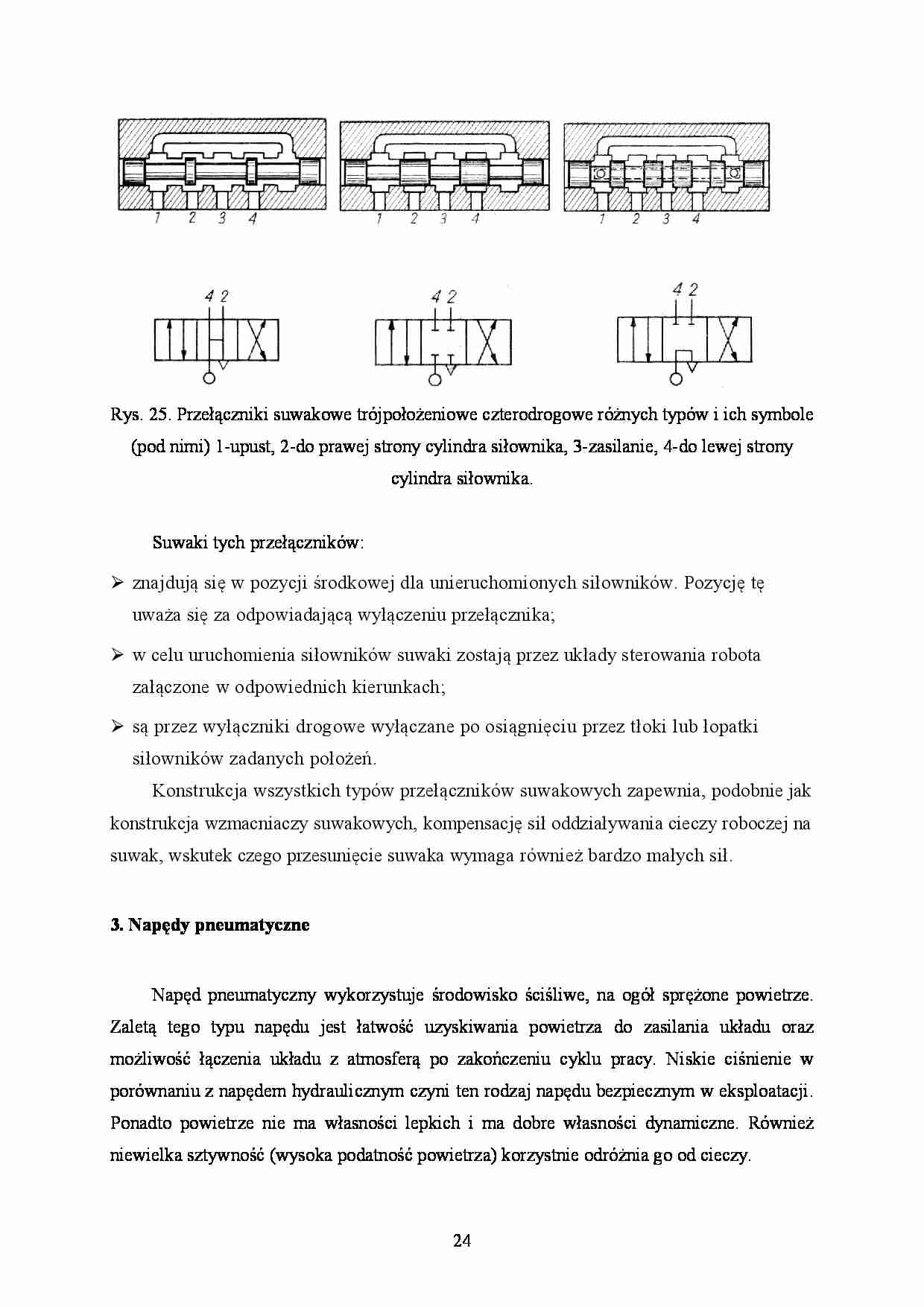


Rys. 25. Przełączniki suwakowe trójpołożeniowe czterodrogowe różnych typów i ich symbole
(pod nimi) 1-upust, 2-do prawej strony cylindra siłownika, 3-zasilanie, 4-do lewej strony
cylindra siłownika.
Suwaki tych przełączników:
znajdują się w pozycji środkowej dla unieruchomionych siłowników. Pozycję tę
uważa się za odpowiadającą wyłączeniu przełącznika;
w celu uruchomienia siłowników suwaki zostają przez układy sterowania robota
załączone w odpowiednich kierunkach;
są przez wyłączniki drogowe wyłączane po osiągnięciu przez tłoki lub łopatki
siłowników zadanych położeń.
Konstrukcja wszystkich typów przełączników suwakowych zapewnia, podobnie jak
konstrukcja wzmacniaczy suwakowych, kompensację sił oddziaływania cieczy roboczej na
suwak, wskutek czego przesunięcie suwaka wymaga również bardzo małych sił.
3. Napędy pneumatyczne
Napęd pneumatyczny wykorzystuje środowisko ściśliwe, na ogół sprężone powietrze.
Zaletą tego typu napędu jest łatwość uzyskiwania powietrza do zasilania układu oraz
możliwość łączenia układu z atmosferą po zakończeniu cyklu pracy. Niskie ciśnienie w
porównaniu z napędem hydraulicznym czyni ten rodzaj napędu bezpiecznym w eksploatacji.
Ponadto powietrze nie ma własności lepkich i ma dobre własności dynamiczne. Również
niewielka sztywność (wysoka podatność powietrza) korzystnie odróżnia go od cieczy.
24
Podstawowymi zaletami napędu pneumatycznego są:
bardzo duża pewność ruchowa;
większa prostota konstrukcji aniżeli dla napędów hydraulicznych;
niska cena urządzeń w porównaniu z napędem hydraulicznym;
mała masa urządzeń i pomijalna masa czynnika roboczego w porówna niu z napędami
hydraulicznymi;
powolne
narastanie
sił,
bardzo
istotne
np.
przy
sterowaniu
chwytaków.
Stąd często przy hydraulicznym lub elektrycznym napędzie ramion manipulatora
spotyka się napęd pneumatyczny chwytaka;
duża przeciążalność;
iskrobezpieczeństwo.
Do wad napędów pneumatycznych należy:
trudność
uzyskiwania
ruchów
jednostajnych
z
powodu
dużej
ściśliwości
czynnika roboczego;
duża wrażliwość ruchu na zmiany obciążenia;
gwałtowny rozruch, szczególnie przy małym obciążeniu;
znacznie mniejsze siły i
momenty aniżeli dla napędów hydraulicznych.
Wynika to z konieczności ograniczania ciśnień roboczych do ok. 0,49...0,69 MPa (ok.
5...7 atn); przy wyższych ciśnieniach wzrastają bowiem nieproporcjonalnie koszty
sprężania powietrza;
konieczność zabezpieczania elementów przed korozją;
trudność sterowania położenia elementu wykonawczego.
Pod względem konstrukcyjnym i funkcjonalnym napędy pneumatyczne manipulatorów mają dużo cech wspólnych z napędami hydraulicznymi sterowanymi
dwupołożeniowo
za pomocą
przełączników
hydraulicznych.
W skład
napędów
pneumatycznych wchodzą:
elementy wykonawcze — siłowniki — sprzęgnięte bezpośrednio z ramionami
manipulatorów;
elementy sterujące — przełączniki pneumatyczne sterujące dwupołożeniowo
przepływ czynnika roboczego;
źródło
czynnika
roboczego,
którym
jest
najczęściej
(…)
… siłowniki pneumatyczne;
cyfrowe siłowniki pneumatyczne.
Jeśli potrzebny jest duży czynny moment siły na wałku wyjściowym siłownika w
całym zakresie przesunięć kątowych φy, stosuje się rozwiązania konstrukcyjne, w których
elementami zasadniczymi są siłowniki dwustronnego działania tłokowe lub membranowe. W
rozwiązaniu przedstawionym na rysunku 32 siłownik pneumatyczny dwustronnego działania
1 napędza przez przekładnię typu zębatka-koło zębate wałek wyjściowy 2.
Sygnał px podaje się do mieszka wejściowego ustawnika precyzyjnego 3. Ruchoma
dźwignia ustawnika steruje dwiema kaskadami pneumatycznymi wektorowymi pracującymi
w układzie różnicowym. Ciśnienie kaskadowe pk1 i pk2 podaje się do komór wejściowych
siłownika 1. Obrót wałka wyjściowego 2 powoduje przez cięgno 4 napinanie sprężyny
pomiarowej w torze sprzężenia zwrotnego (1-3). W stanie ustalonym istnieje, mimo oporów,
określona zależność liniowa φk = kpx.
31
Rys. 32. Schemat siłownika pneumatycznego z przesunięciem kątowym
Zastosowanie
kaskad
pneumatycznych
pozwala
uzyskać
wysoką
dokładność
przetwarzania px/ φy oraz zwiększenie siły czynnej 1 i momentu siły czynnej na wałku
wejściowym 2. Wymagana jest pełna szczelność komór wejściowych siłownika 1.
Na rys. 33 jest przedstawiony siłownik pneumatyczny z przekładnią zębatą (koło
zębate - zębatka). Ten siłownik stosuje się w przypadku, gdy amplituda ruchu obrotowego
jest ograniczona (np. przegub promieniowo-nadgarstkowy manipulatora).
Rys. 33. Siłownik pneumatyczny z przekładnią zębatą
32
…
… do ciśnienia wyjściowego sterowników p0 i jest
niezależne od prędkości dźwigni. Sprężone powietrze o wysokim ciśnieniu umożliwia
szybkie i dokładne ruchy z udziałem mechanicznych ograniczników do zatrzymania
poszczególnych przegubów.
27
Rys. 28. Udoskonalony siłownik pneumatyczny z rys. 27
Jeżeli mamy do czynienia z dużymi udźwigami, wymagającymi utrzymania określonej
trajektorii, należy stosować siłowniki…
... zobacz całą notatkę
Komentarze użytkowników (0)