To tylko jedna z 4 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę


24/04/2010
REDUKCJA
DOWOLNEGO
UKŁADU SIŁ
1
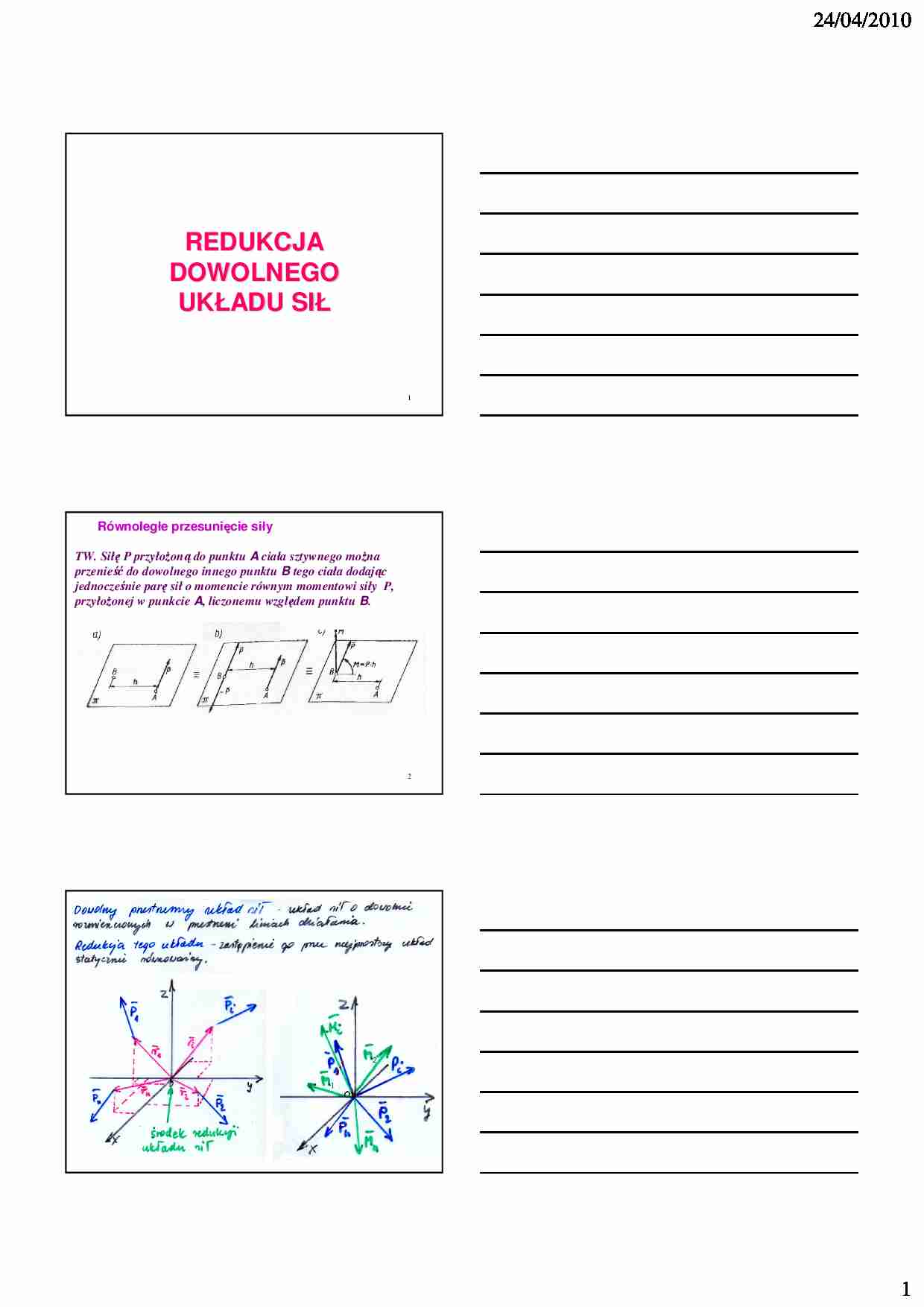
Równoległe przesunięcie siły
wnoległ przesunię
sił
TW. Siłę P przyłoŜoną do punktu A ciała sztywnego moŜna
przenieść do dowolnego innego punktu B tego ciała dodając
jednocześnie parę sił o momencie równym momentowi siły P,
przyłoŜonej w punkcie A, liczonemu względem punktu B.
2
REDUKCJA DOWOLNEGO UKŁADU SIŁ
SIŁ
3
1
24/04/2010
Redukcja układu sił do punktu
ukł
sił
4
Wektor główny R
i moment główny M O
5
Wektor główny R
i moment główny M O
6
2
24/04/2010
Wektor główny R
7
Moment główny M O
8
Zmiana środka redukcji
miana
9
3
24/04/2010
Iloczyn skalarny wektora momentu głównego i wektora
skalarn
głównego
10
Niezmienniki układu sił
Wektor główny R nie zaleŜy od połoŜenia
gł
zaleŜ
poł
środka redukcji. Nazywa się go pierwszym
redukcji. Nazywa się
niezmiennikiem układu sił.
ukł
sił
Rzut wektora momentu głównego M O na
wektora
wnego
kierunek wektora głównego R nie zaleŜy
gł
zaleŜ
od połoŜenia środka redukcji. Nazywa się go
poł
redukcji.
się
drugim niezmiennikiem układu sił.
ukł
sił
11
4
... zobacz całą notatkę
Komentarze użytkowników (0)