To tylko jedna z 3 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę


L. Kaszycki. Notatka składa się z 3 stron.
Definicja robota Robot jajo urządzenie techniczne przeznaczone do realizacji niektórych funkcji manipulacyjnych i lokomocyjnych człowieka, mające określony poziom energetyczny, informacyjny i inteligencji maszynowej (autonomii działania w pewnym środowisku).
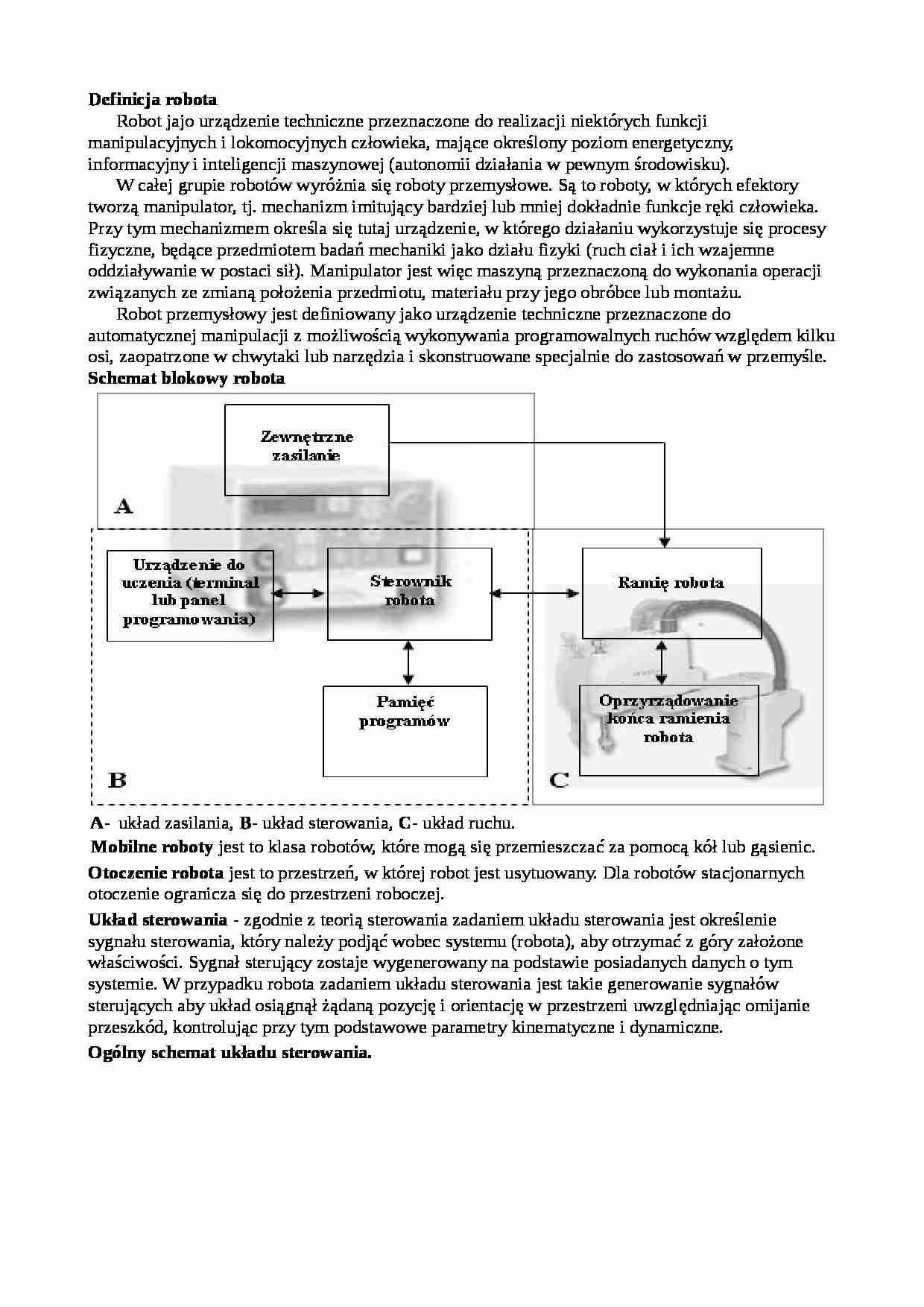
W całej grupie robotów wyróżnia się roboty przemysłowe. Są to roboty, w których efektory tworzą manipulator, tj. mechanizm imitujący bardziej lub mniej dokładnie funkcje ręki człowieka. Przy tym mechanizmem określa się tutaj urządzenie, w którego działaniu wykorzystuje się procesy fizyczne, będące przedmiotem badań mechaniki jako działu fizyki (ruch ciał i ich wzajemne oddziaływanie w postaci sił). Manipulator jest więc maszyną przeznaczoną do wykonania operacji związanych ze zmianą położenia przedmiotu, materiału przy jego obróbce lub montażu. Robot przemysłowy jest definiowany jako urządzenie techniczne przeznaczone do automatycznej manipulacji z możliwością wykonywania programowalnych ruchów względem kilku osi, zaopatrzone w chwytaki lub narzędzia i skonstruowane specjalnie do zastosowań w przemyśle. Schemat blokowy robota układ zasilania, B - układ sterowania, C - układ ruchu. Mobilne roboty jest to klasa robotów, które mogą się przemieszczać za pomocą kół lub gąsienic. Otoczenie robota jest to przestrzeń, w której robot jest usytuowany. Dla robotów stacjonarnych otoczenie ogranicza się do przestrzeni roboczej. Układ sterowania - zgodnie z teorią sterowania zadaniem układu sterowania jest określenie sygnału sterowania, który należy podjąć wobec systemu (robota), aby otrzymać z góry założone właściwości. Sygnał sterujący zostaje wygenerowany na podstawie posiadanych danych o tym systemie. W przypadku robota zadaniem układu sterowania jest takie generowanie sygnałów sterujących aby układ osiągnął żądaną pozycję i orientację w przestrzeni uwzględniając omijanie przeszkód, kontrolując przy tym podstawowe parametry kinematyczne i dynamiczne. Ogólny schemat układu sterowania.
Bardzo częstym określeniem związanym z robotami jest pojęcie generacji robotów, można wyróżnić III generacje robotów. Opisując poszczególne generacje robotów należy skupić się na ich układzie sterowania oraz sensoryce. Roboty I generacji to roboty zaprogramowane najczęściej na określoną sekwencję czynności (istnieje możliwość ich przeprogramowania). W robotach tej generacji stosowano przeważnie otwarty układ sterowania tak więc robot charakteryzuje się całkowitym brakiem sprzężenia zwrotnego od stanu manipulowanego przedmiotu.
Schemat struktury robota I generacji Roboty II generacji to roboty wyposażone w zamknięty układ sterowania oraz czujniki pozwalające dokonywać pomiarów podstawowych parametrów stanu robota i otoczenia. Roboty II generacji powinny spełniają warunek takiej taktyki przy kontakcie ze światem zewnętrznym, aby uzyskać optymalny efekt działania. Robot powinien rozpoznawać żądany obiekt nawet wówczas, gdy przemieszcza się z innymi obiektami, następnie rozpoznać ten obiekt bez względu na jego położenie i kształt geometryczny. Takie roboty realizują te wymagania za pomocą zespołu czujników.
(…)
… pomiarów parametrów stanu robota i otoczenia. Tak więc roboty te są wyposażone w zdolności rozpoznawania złożonych kształtów i klasyfikacji złożonych sytuacji, a ich system sterowania powinien posiadać zdolności adaptacyjne. Schemat układu sterowania dla robotów III generacji jest taki sam jak dla robotów II generacji. Klasyfikacja robotów przemysłowych Ponieważ robotyka jest stosunkowo młodą dziedziną…
…. Wszystkie 3 osie są obrotowe, działaniem i budową przypominające górną kończynę człowieka. Stosuje się je w przenoszeniu, paletyzacji, spawaniu, zgrzewaniu, lakierowaniu i innych.
b)Równolegle - tworząc zamknięty łańcuch kinematyczny. -Tripody - składające się z trzech ramion równoległych.
-Hexapody - składające się z sześciu ramion równoległych.
c)Hybrydowe - będące połączeniem manipulatorów szeregowych…
... zobacz całą notatkę
Komentarze użytkowników (0)