To tylko jedna z 5 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę
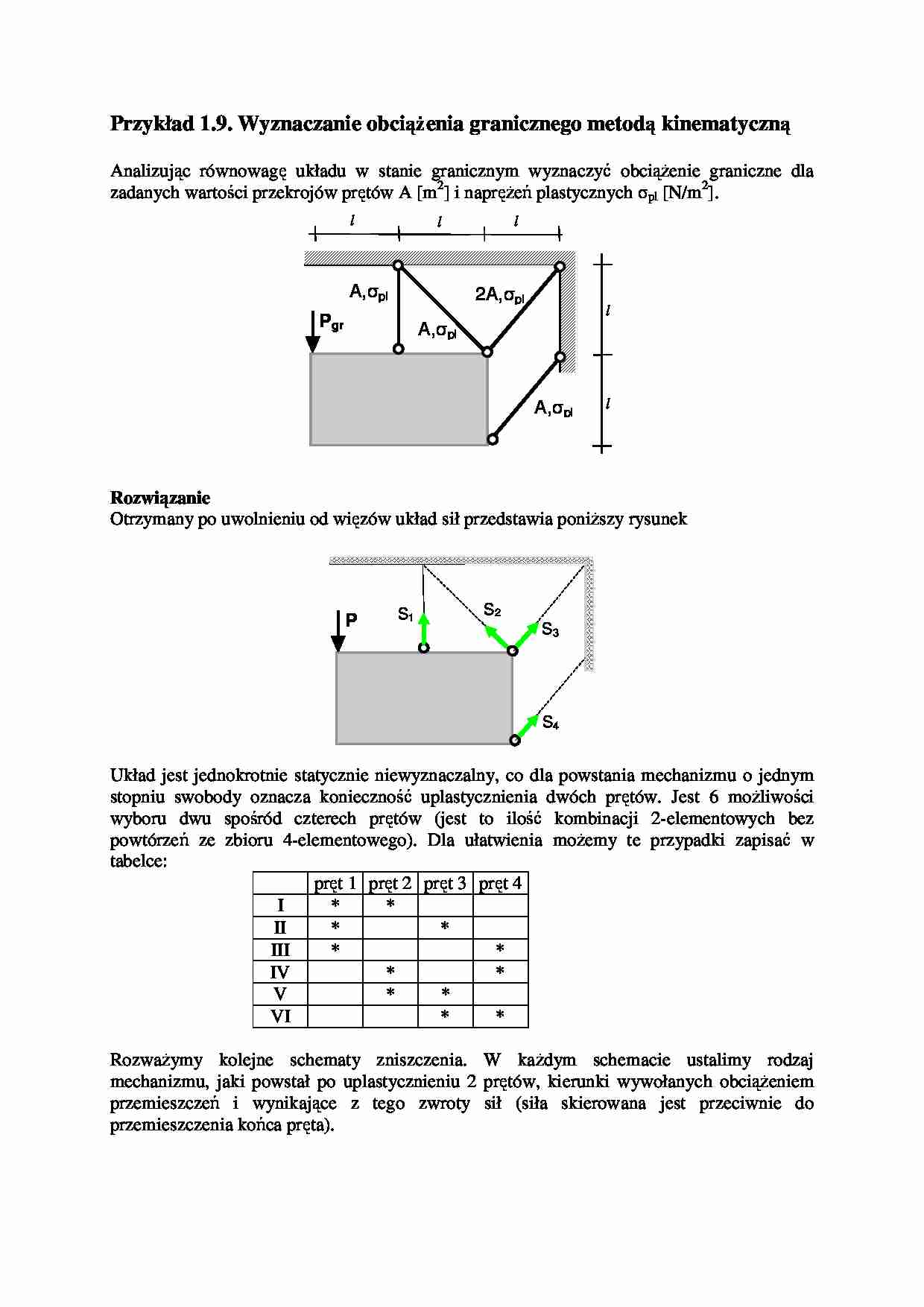


Przykład 1.9. Wyznaczanie obciąŜenia granicznego metodą kinematyczną
Analizując równowagę układu w stanie granicznym wyznaczyć obciąŜenie graniczne dla
zadanych wartości przekrojów prętów A [m2] i napręŜeń plastycznych σpl [N/m2].
l
l
l
A,σpl
2A,σpl
Pgr
l
A,σpl
A,σpl
l
Rozwiązanie
Otrzymany po uwolnieniu od więzów układ sił przedstawia poniŜszy rysunek
P
S1
S2
S3
S4
Układ jest jednokrotnie statycznie niewyznaczalny, co dla powstania mechanizmu o jednym
stopniu swobody oznacza konieczność uplastycznienia dwóch prętów. Jest 6 moŜliwości
wyboru dwu spośród czterech prętów (jest to ilość kombinacji 2-elementowych bez
powtórzeń ze zbioru 4-elementowego). Dla ułatwienia moŜemy te przypadki zapisać w
tabelce:
pręt 1 pręt 2 pręt 3 pręt 4
I
*
*
II
*
*
III
*
*
IV
*
*
V
*
*
VI
*
*
RozwaŜymy kolejne schematy zniszczenia. W kaŜdym schemacie ustalimy rodzaj
mechanizmu, jaki powstał po uplastycznieniu 2 prętów, kierunki wywołanych obciąŜeniem
przemieszczeń i wynikające z tego zwroty sił (siła skierowana jest przeciwnie do
przemieszczenia końca pręta).
I schemat zniszczenia – uplastycznienie prętów 1 i 2
u=ϕ 2 l
I
S1pl
P gr
ϕ
S2pl
ϕ
u
Jedyny dopuszczalny ruch wynika z obrotu prętów 3 i 4 wokół ich punktów podparcia.
Powoduje to przesunięcie równoległe tarczy w wektor u.
Zapisujemy zasadę pracy wirtualnej
1
1
I
Pgr u
− S1pl u
− S2 pl u = 0
2
2
i po podstawieniu nośności prętów S1pl = A σpl , S2pl = A σpl obliczamy, Ŝe dla u ≠ 0
(
)
I
Pgr = 1 + 2 Aσ pl = 2.414 Aσ pl .
II schemat zniszczenia – uplastycznienie prętów 1 i 3
upx
5/2l
1/2l
P
II
gr
S3pl
S1pl
upy
up
φ
u3
u1
up
3/2l
φ
u1x
u1
1/2 l
K2
1/2l
u1y
φ
K2
K2 - środek obrotu
3/2 l
5/2 l
W powstałym mechanizmie tarcza obraca się wokół chwilowego środka obrotu w punkcie K2.
Równanie pracy wirtualnej
II
Pgr u py − S1pl u1y − S3pl u 3 = 0
po podstawieniu zaleŜności
S1pl = A σpl , S3pl = 2A σpl
5
3
u py = φ l
u1y = φ l
2
2
sprowadza się do równania
II
Pgr
u3 = φ
2
l
2
5
3
2
φl − Aσ pl φl − 2Aσ pl
φl = 0 ,
2
2
2
2
z którego obliczamy dla φ ≠ 0
3+ 2 2
Aσ pl = 1.166 Aσ pl
5
III schemat zniszczenia – uplastycznienie prętów 1 i 4
II
Pgr =
PIIIgr
S1pl
φ
u1
up
K3 - środek obrotu
S4pl
u4
Kinematycznie dopuszczalny obrót powoduje ściskanie pręta 4. Zatem uplastycznienie tego
pręta nastąpi na skutek ściskania (na rysunku zaznaczono to dla zwrócenia uwagi kolorem
czerwonym).
Zasada pracy wirtualnej
III
Pgr u p − S1pl u1 − S4pl u 4
1
=0
2
po podstawieniu zaleŜności
S1pl = A σpl , S4pl = A σpl
u p = φ 2l
u 1 = φl
u 4 = φl
daje równanie
2
l = 0,
2
z którego obliczamy graniczne obciąŜenie dla tego schematu
2
III 1
.
Pgr = +
2 4 Aσ pl = 0.854 Aσ pl
III
Pgr φ 2l − S1plφl − S4pl φ
IV schemat zniszczenia – uplastycznienie prętów 2 i 4
S2pl
PIVgr
u2
up
S4pl
ϕ
u4
K4 - środek obrotu
3
Równanie pracy sił na wirtualnych przemieszczeniach ma postać
1
1
IV
Pgr u p
− S 2pl u 2 − S 4pl u 4
= 0,
2
2
która po podstawieniu
S1pl = A σpl , S4pl = A σpl
u p = φ 2l
u 2
... zobacz całą notatkę
Komentarze użytkowników (0)