To tylko jedna z 2 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę

TRANSFORMACJA WSPÓŁRZĘDNYCH
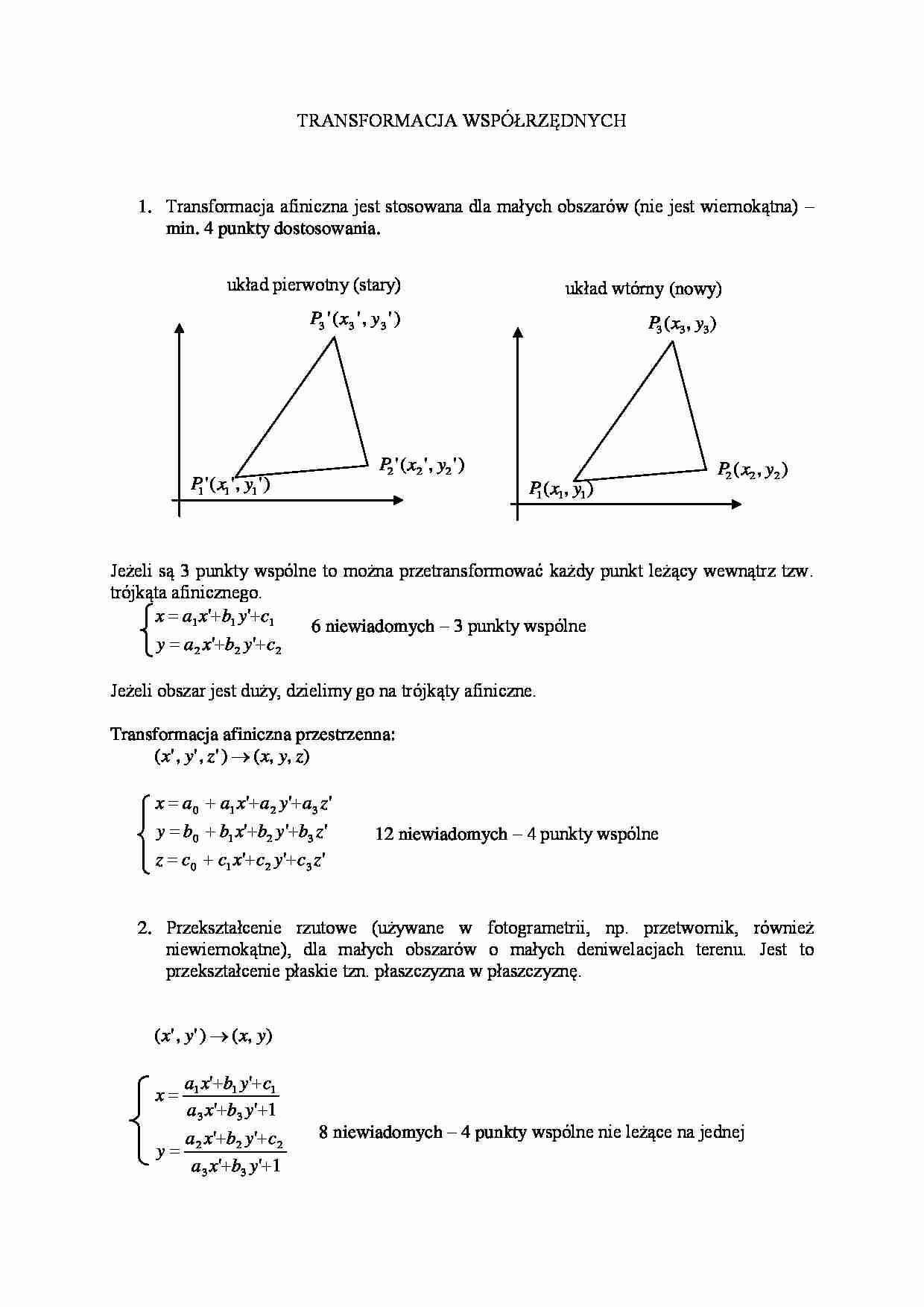
1. Transformacja afiniczna jest stosowana dla małych obszarów (nie jest wiernokątna) –
min. 4 punkty dostosowania.
układ pierwotny (stary)
układ wtórny (nowy)
P3 ' ( x3 ' , y 3 ' )
P3 ( x3 , y3 )
P3 ' ( x3 ' , y 3 ' )
P3 ' ( x3 ' , y 3 ' )
P2 ' ( x2 ' , y2 ' )
P3 ' ( x3 ' , y 3 ' )
P ' ( x1 ' , y1 ' )
1
P3 ' ( x3 ' , y 3 ' )
P ( x1 , y1 )
1
P3 ' ( x3 ' , y 3 ' )
P2 ( x2 , y2 )
P3 ' ( x3 ' , y 3 ' )
Jeżeli są 3 punkty wspólne to można przetransformować każdy punkt leżący wewnątrz tzw.
trójkąta afinicznego.
x a1 x'b1 y 'c1
6 niewiadomych – 3 punkty wspólne
y a 2 x'b2 y 'c 2
Jeżeli obszar jest duży, dzielimy go na trójkąty afiniczne.
Transformacja afiniczna przestrzenna:
( x' , y' , z' ) ( x, y, z)
x a 0 a1 x' a 2 y ' a 3 z '
y b0 b1 x'b2 y 'b3 z '
12 niewiadomych – 4 punkty wspólne
z c 0 c1 x'c 2 y 'c3 z '
2. Przekształcenie rzutowe (używane w fotogrametrii, np. przetwornik, również
niewiernokątne), dla małych obszarów o małych deniwelacjach terenu. Jest to
przekształcenie płaskie tzn. płaszczyzna w płaszczyznę.
( x' , y' ) ( x, y)
x
a1 x'b1 y 'c1
a 3 x'b3 y '1
y
a 2 x'b2 y 'c 2
a 3 x'b3 y '1
8 niewiadomych – 4 punkty wspólne nie leżące na jednej
prostej
3. Transformacja wiernokątne współrzędnych płaskich.
układ pierwotny
układ wtórny
x'
x
z '
z ' x'iy '
P3 ' ( x3 ' , y 3 ' )
z0 ' x0 'iy0 '
z
z x iy
P3 ' ( x3 ' , y 3 ' )
z0 x0 iy0
P3 ' ( x3 ' , y 3 ' )
P3 ' ( x3 ' , y 3 ' )
y'
y
z ' z ' z0 ' x'iy ' x0 'iy 0 ' x' x0 'i ( y ' y0 ' )
z ' x'iy '
z z z0 x iy x0 iy 0 x x0 i ( y y0 )
z x iy
Po przesunięciu obu układów do pokrycia się można napisać funkcję analityczną zmiennej
zespolonej.
z f (z ' ) f (x'iy' )
x iy f (x'iy' )
Dla małych obszarów można rozwijać funkcję w szeregi:
z A Bz'Cz' 2 Dz' 3
gdzie:
A g 0 ih 0
B g 1 ih1
C g 2 ih 2
D g 3 ih3
itd .
x iy g0 ih0 ( g1 ih1 )(x'iy' ) ( g 2 ih2 )(x'iy' ) 2 ( g3 ih3 )(x'iy' )3
g 0 , h0 - wyrażają przesunięcie dlatego można opuścić A przy założeniu nasunięcia obu
układów
g 1 , h1 - wyrażają obrót, skręt i zmianę skali
wobec czego:
x iy ( g1 ih1 )(x'iy' ) ( g 2 ih2 )(x' 2 2ix' y'y' 2 ) ( g 3 ih3 )(x'iy' ) 3
Po wymnożeniu i rozdzieleniu części rzeczywistej i urojonej i koniec.
... zobacz całą notatkę
Komentarze użytkowników (0)