To tylko jedna z 71 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę
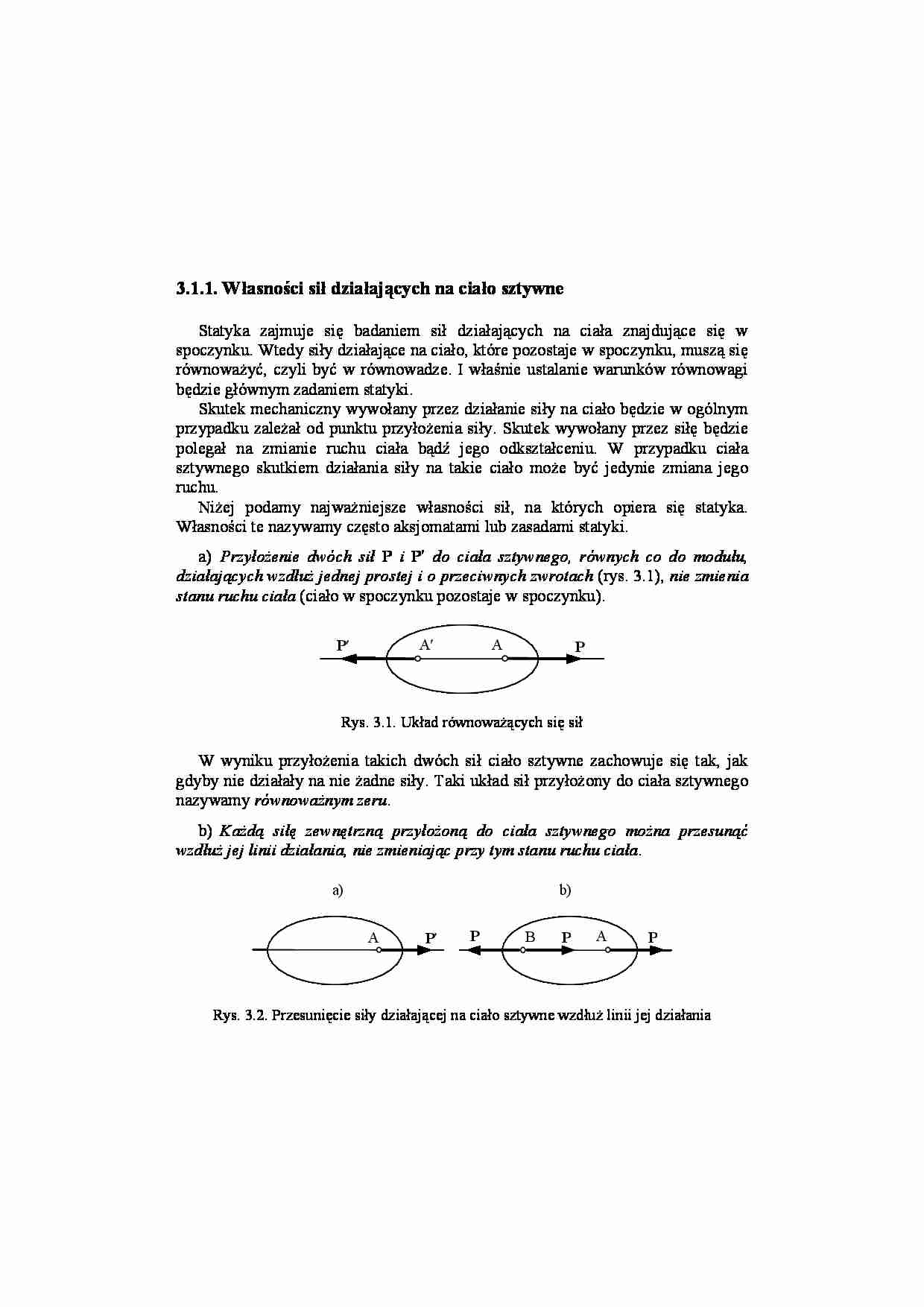


3.1.1. Własności sił działających na ciało sztywne Statyka zajmuje się badaniem sił działających na ciała znajdujące się w spoczynku. Wtedy siły działające na ciało, które pozostaje w spoczynku, muszą się równoważyć, czyli być w równowadze. I właśnie ustalanie warunków równowagi będzie głównym zadaniem statyki. Skutek mechaniczny wywołany przez działanie siły na ciało będzie w ogólnym przypadku zależał od punktu przyłożenia siły. Skutek wywołany przez siłę będzie polegał na zmianie ruchu ciała bądź jego odkształceniu. W przypadku ciała sztywnego skutkiem działania siły na takie ciało może być jedynie zmiana jego ruchu. Niżej podamy najważniejsze własności sił, na których opiera się statyka. Własności te nazywamy często aksjomatami lub zasadami statyki. a) Przyłożenie dwóch sił P i P ′ do ciała sztywnego, równych co do modułu, działających wzdłuż jednej prostej i o przeciwnych zwrotach (rys. 3.1), nie zmienia stanu ruchu ciała (ciało w spoczynku pozostaje w spoczynku). P ′ P A ′ A Rys. 3.1. Układ równoważących się sił W wyniku przyłożenia takich dwóch sił ciało sztywne zachowuje się tak, jak gdyby nie działały na nie żadne siły. Taki układ sił przyłożony do ciała sztywnego nazywamy równoważnym zeru . b) Każdą siłę zewnętrzną przyłożoną do ciała sztywnego można przesunąć wzdłuż jej linii działania, nie zmieniając przy tym stanu ruchu ciała . P P B A P a) b) A P ′ Rys. 3.2. Przesunięcie siły działającej na ciało sztywne wzdłuż linii jej działania Załóżmy, ze siła P jest przyłożona do ciała sztywnego w punkcie A, jak na rys. 3.2a. Do dowolnego punktu B leżącego na linii działania tej siły przyłóżmy dwie równoważące się siły P i P ′ = – P , czyli układ zerowy (rys. 3.2b). Widzimy, że siły P i P ′ przyłożone odpowiednio w punktach A i B tworzą układ zerowy, zatem można je pominąć. W efekcie zostaje nam jedynie siła P przyłożona w punkcie B. Z przeprowadzonego wywodu wynika, że siła zewnętrzna działająca na ciało sztywne jest wektorem przesuwnym. c) Do każdego układu sił działających na ciało sztywne można dodać bez zmiany stanu jego ruchu kilka sił o wspólnym punkcie przyłożenia, których suma wektorowa (geometryczna) jest równa zeru . d) Stan ruchu ciała nie ulegnie zmianie, jeżeli kilka sił zaczepionych w jednym punkcie zastąpimy ich sumą geometryczną, i odwrotnie , gdy jedną siłę zastąpimy przez kilka sił, których suma geometryczna jest równa tej sile
... zobacz całą notatkę
Komentarze użytkowników (0)