To tylko jedna z 16 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę
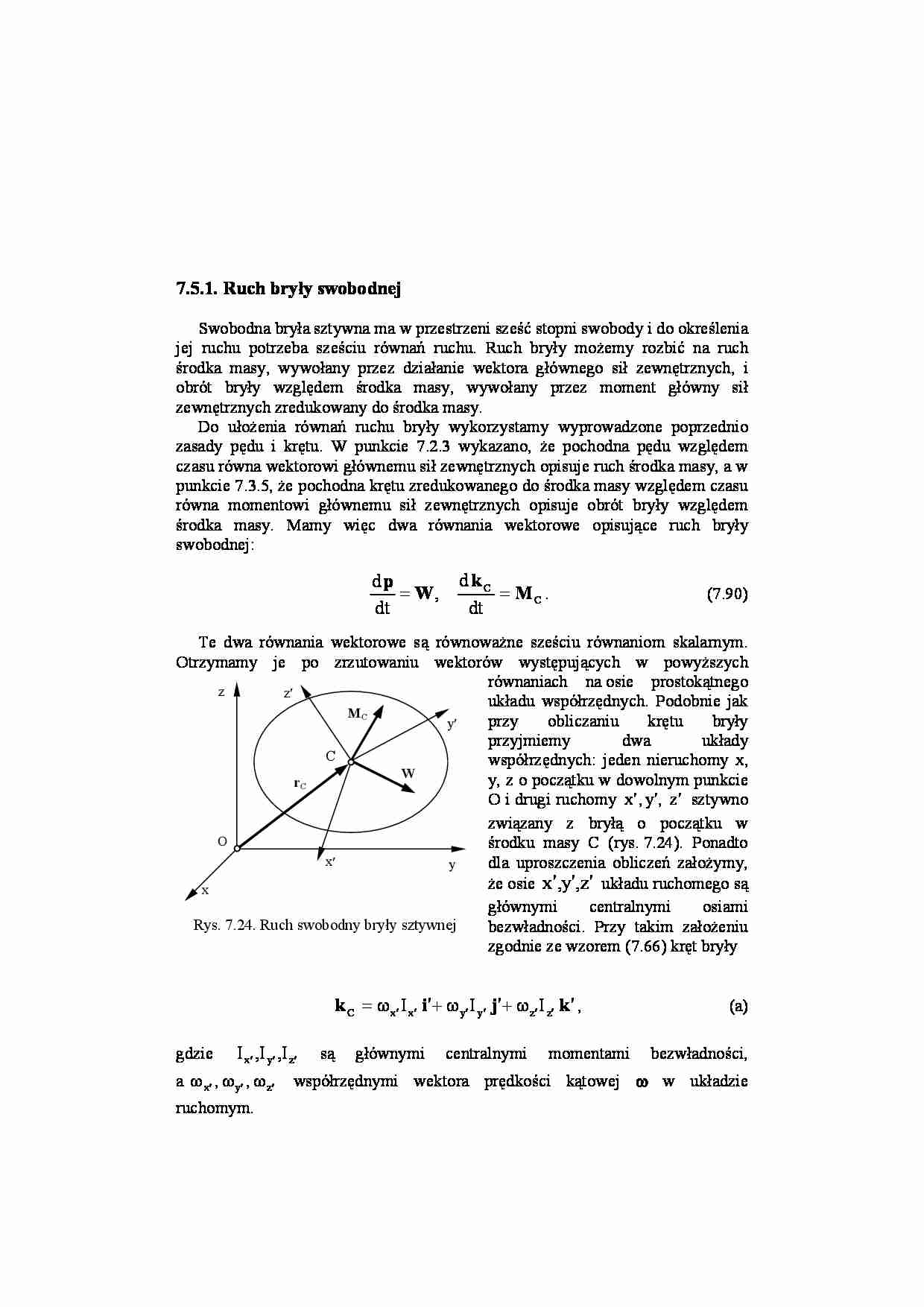


7.5.1. Ruch bryły swobodnej Swobodna bryła sztywna ma w przestrzeni sześć stopni swobody i do określenia jej ruchu potrzeba sześciu równań ruchu. Ruch bryły możemy rozbić na ruch środka masy, wywołany przez działanie wektora głównego sił zewnętrznych, i obrót bryły względem środka masy, wywołany przez moment główny sił zewnętrznych zredukowany do środka masy. Do ułożenia równań ruchu bryły wykorzystamy wyprowadzone poprzednio zasady pędu i krętu. W punkcie 7.2.3 wykazano, że pochodna pędu względem czasu równa wektorowi głównemu sił zewnętrznych opisuje ruch środka masy, a w punkcie 7.3.5, że pochodna krętu zredukowanego do środka masy względem czasu równa momentowi głównemu sił zewnętrznych opisuje obrót bryły względem środka masy. Mamy więc dwa równania wektorowe opisujące ruch bryły swobodnej: C C dt d , dt d M k W p = = . (7.90) Te dwa równania wektorowe są równoważne sześciu równaniom skalarnym. Otrzymamy je po zrzutowaniu wektorów występujących w powyższych równaniach na osie prostokątnego układu współrzędnych. Podobnie jak przy obliczaniu krętu bryły przyjmiemy dwa układy współrzędnych: jeden nieruchomy x, y, z o początku w dowolnym punkcie O i drugi ruchomy ′ ′ ′ x , y , z sztywno związany z bryłą o początku w środku masy C (rys. 7.24). Ponadto dla uproszczenia obliczeń założymy, że osie z , y , x ′ ′ ′ układu ruchomego są głównymi centralnymi osiami bezwładności. Przy takim założeniu zgodnie ze wzorem (7.66) kręt bryły k j i k ′ ω + ′ ω + ′ ω = ′ ′ ′ ′ ′ ′ z z y y x x C I I I , (a) gdzie są głównymi centralnymi momentami bezwładności, a współrzędnymi wektora prędkości kątowej ω w układzie ruchomym. z y x I , I , I ′ ′ ′ ω ω ω ′ ′ x , , y z ′ x z x ′ z ′ y ′ y r C C O M C W Rys. 7.24. Ruch swobodny bryły sztywnej W pierwszej kolejności obliczymy pochodną krętu k C względem czasu z wykorzystaniem podanych w kinematyce bryły wzorów na pochodne względem czasu wersorów układu ruchomego (5.31). k ω k j ω j i ω i ′ × = ′ ′ × = ′ ′ × = ′ t d d , t d d , t d d . + ′ ω + ′ ω + ′ ω = = ′ ω + ′ ω + ′ ω + + ′ ω + ′ ω + ′ ω = ′ ′ ′ ′ ′
(…)
…. Ruch obrotowy bryły sztywnej wokół osi dowolnej
Zatem przyśpieszenie aC środka masy bryły wyrazi wzór:
a C = ω× (ω× rC ) = ω(ω⋅ rC ) − rC ω 2 .
(g)
Jeżeli wektor wodzący rC środka masy zapiszemy za pomocą współrzędnych
w układzie ruchomym:
rC = x ′ i ′+ y ′ j′+ z ′ k ′,
C
C
C
to po zrzutowaniu wektora (g) na osie x ′ , y ′, z′ i odpowiednim pogrupowaniu
wyrazów otrzymamy wzory na współrzędne…
... zobacz całą notatkę
Komentarze użytkowników (0)