To tylko jedna z 4 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę


Sprawozdanie z laboratorium Automatyki i Robotyki
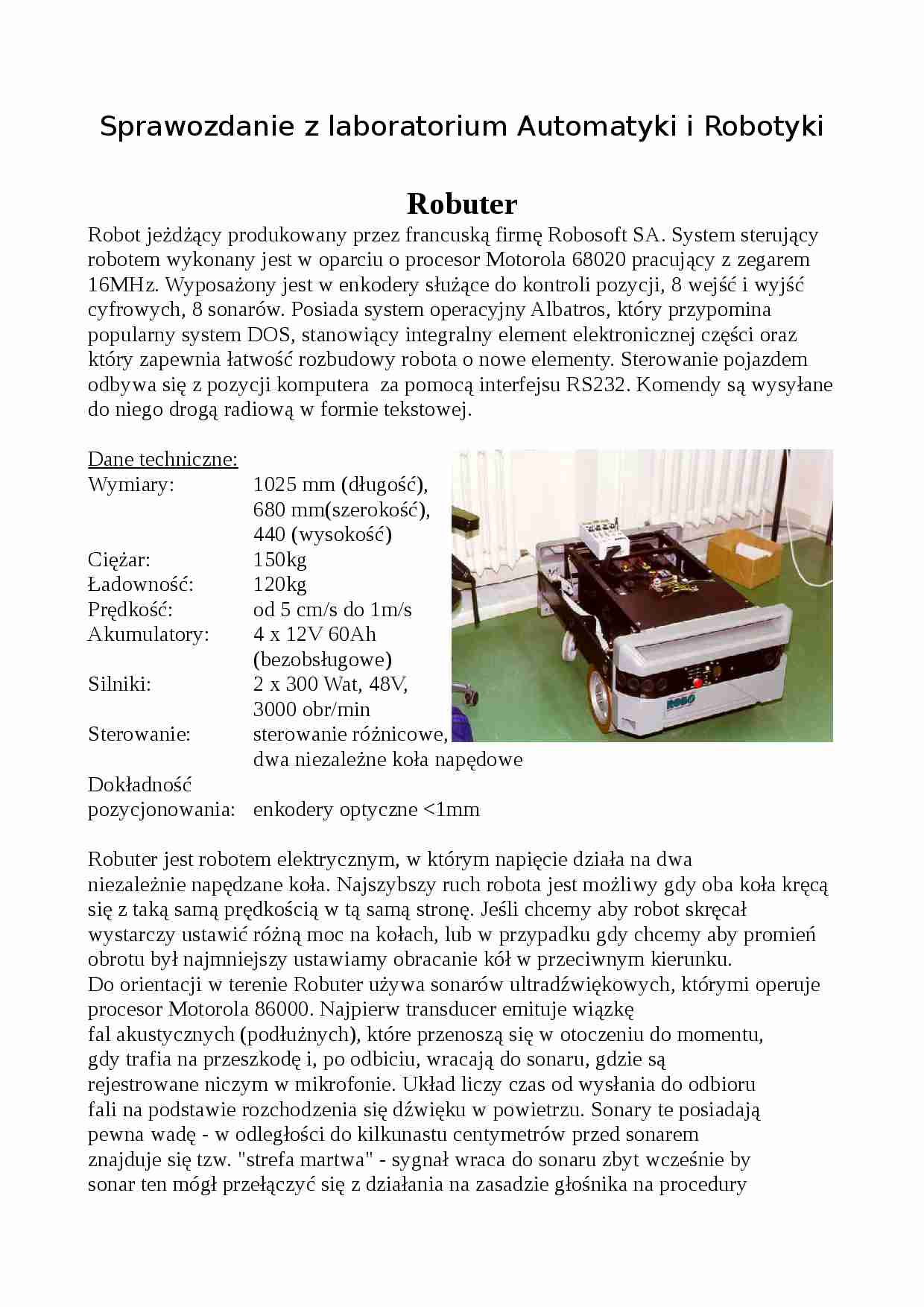
Robuter
Robot jeżdżący produkowany przez francuską firmę Robosoft SA. System sterujący robotem wykonany jest w oparciu o procesor Motorola 68020 pracujący z zegarem 16MHz. Wyposażony jest w enkodery służące do kontroli pozycji, 8 wejść i wyjść cyfrowych, 8 sonarów. Posiada system operacyjny Albatros, który przypomina popularny system DOS, stanowiący integralny element elektronicznej części oraz który zapewnia łatwość rozbudowy robota o nowe elementy. Sterowanie pojazdem odbywa się z pozycji komputera za pomocą interfejsu RS232. Komendy są wysyłane do niego drogą radiową w formie tekstowej.
Dane techniczne:
Wymiary: 1025 mm (długość), 680 mm(szerokość), 440 (wysokość)
Ciężar: 150kg
Ładowność: 120kg
Prędkość: od 5 cm/s do 1m/s
Akumulatory: 4 x 12V 60Ah (bezobsługowe)
Silniki: 2 x 300 Wat, 48V, 3000 obr/min
Sterowanie: sterowanie różnicowe, dwa niezależne koła napędowe
Dokładność pozycjonowania: enkodery optyczne
(…)
… z rdzeniem AVR-Atmega128, jednak ograniczają się one do wysterowania i kontroli położenia mechanizmów wykonawczych, odczytu danych z czujników, obsługi modemu komunikacyjnego i wymiany danych z komputerem nadrzędnym,kontrolowaniu stanu wewnętrznego robota i sygnalizowaniu o błędach. Ponieważ komputer PC posiada dużo większą moc obliczeniową sterowanie i wyznaczanie położenia przegubów zostało zaimplementowane właśnie w komputerze PC. Komputer i mikrokontroler na robocie tworzą tzw. układ rozproszony, w którym komunikują się za pośrednictwem łącza szeregowego wg standardu RS232C transmitowanego za pomocą fal radiowych o częstotliwości 434MHz. Wymiana danych odbywa się w uporządkowanych ramkach o stałej długości 18 bajtów z prędkością 19.2kb/s.
Oto jak „Dragon” się prezentował na naszych zajęciach…
…) można tworzyć linie, odcinki, kształty. Urządzenia typu skaner mogą być wykorzystywane głównie w celu poprawy
bezpieczeństwa instytucji i mienia, w robotach mobilnych i fabrykach (m.in. tam, gdzie ludzie nie mają dostępu).
Oto przykładowa „mapa” otoczenia zarejestrowana przez skaner na naszych zajęciach przy otworzonych drzwiach.
„Dragon”
Robot zaprojektowany i wykonany przez zespół z Instytutu Cybernetyki Technicznej Politechniki Wrocławskiej (obecnie Instytut Informatyki Automatyki i Robotyki). Opiekunem naukowym projektu został dr. Andrzej Wołczowski, natomiast szefem projektu Zbigniew Brzozowski. W robotach tego typu stosuje się przenoszenie środka ciężkości na jedną nogę, co pozwala na zmianę położenia drugiej nogi i w rezultacie przemieszczenia całego robota.
Dzięki rozmieszczeniu masy na segmenty…
... zobacz całą notatkę
Komentarze użytkowników (0)