To tylko jedna z 4 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę

Regulatory:
Regulator jest urządzeniem, które ma na celu:
- porównanie zmierzonej wielkości regulowanej y z wielkością zadaną w i określenie wielkości uchybu (błędu) e=w-y
- w zależności od odchyłki regulacji, czasu jej trwania oraz szybkości zmian wytworzenie sygnału wyjściowego zwanego sygnałem sterującym u o takiej wartości aby błąd regulacji miał dostatecznie małą wartość
- takie kształtowanie własności dynamicznych układu regulacji aby układ był stabilny oraz zapewniał wymaganą jakość regulacji
W skład regulatora wchodzi:
- układ formujący sygnał (algorytm działania regulatora)
-węzeł sumacyjny
Transmitacja regulatora: E(s)- transformata sygnału wejściowego Reg.
U(s)- transformata sygnału wyjściowego reg.
Element y układu regulacji:
Element wykonawczy- przenosi sygnał sterujący uformowany w regulatorze na obiekt regulacji
Element pomiarowy (czujnik)- dokonuje pomiaru wielkości sygnału
Podział ze względu na sposób dostarczani energii:
Regulator bezpośredniego działania- energię potrzebną do napędu elementu wykonaw. Pobierają z obiektu regulacji za pośrednictwem elementu pomiarowego. Element pomiarowy, napęd i elem. Wykonawczy stanowią zazwyczaj całość. Prosta budowa i niski koszt. Mała dokładność regulacji spowodowana odchyłką i histerezą.
Regulator pośredniego działania- zasilane w energię pomocniczą obcego źródła.
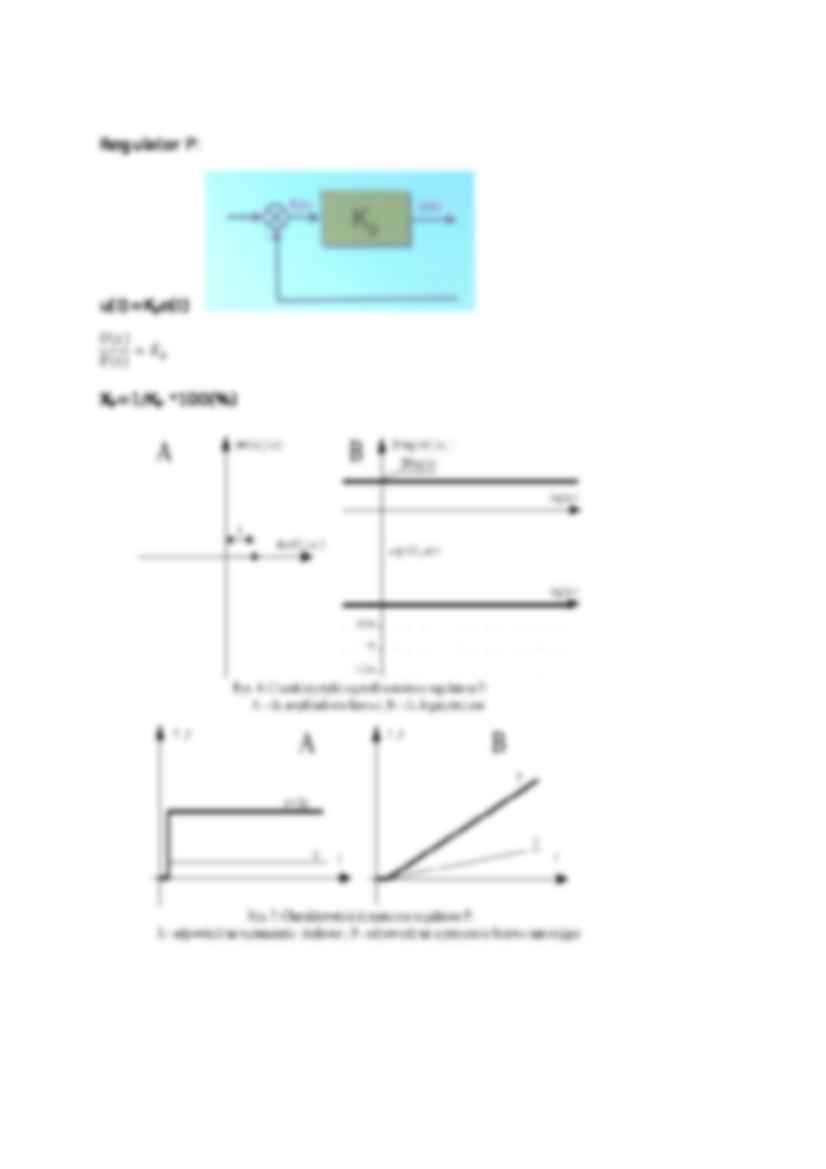
Regulator P:
u(t)=Kpe(t) Xp=1/Kp *100(%)
Regulator PI
GPI(s) = KP(1+1/Tis)
Regulator PD
GPD(s) = KP(1 + Tds)
Regulator PID
U(t) = kp(E(t) + 1/TicałE(t)dt + Td*dE(t)/dt)
GPID(s) = kp(1 + 1/Tis + Tds)
... zobacz całą notatkę
Komentarze użytkowników (0)