

Fragment notatki:
zagadnienia takie jak: schemat układu automatyki, różnica pomiędzy otwartym układem sterowania, a układem regulacji automatycznej, cel wprowadzania w maszynach i urządzeniach technicznych układów automatyki, obiekt regulacji i wielkość regulowana, zadania regulatora, transmitancja regulatora PID, przeregulowanie i czas regulacji, dobór parametrów regulatora metody Zieglera-Nicholsa, układy regulacji stałowartościowej. Ponadto z notatki można się dowiedzieć: co to jest układ regulacji programowej, co to są układy nadążne, jaka jest definicja transmitancji operatorowej, co to jest stabilność układu, co to jest kryterium Hurwitza, jakie są najważniejsze cechy układu liniowego automatyki, co nazywamy charakterystyką statyczną elementu lub układu automatyki.
2. Różnica pomiędzy otwartym układem sterowania, a układem regulacji automatycznej (układem automatyki).
Sterowanie w ukł. otwartym wymaga obecności człowieka. Człowiek uczestniczący w tym procesie musi mieć wzorzec, z którego stale będzie porównywał sygnał Wy. Inaczej - musi oddziaływać na obiekt poprzez urządzenie sterujące tak aby sygnał Wy y był prawidłowy, czyli musi kompensować zakłócenia. Sterowanie w ukł. zamkniętym - jest to układ ze sprzężeniem zwrotnym. Działanie takiego układu sprowadza się do tego, że gdy następuje zmian sygnału WY, którego wartość dąży do zrównania z wielkością zadaną, to przez sprzężenie zwrotne układ jest w stanie sam skompensować zakłócenia i powrócić do stanu równowagi. Różnicą jest obecność pętli sprzężenia zwrotnego
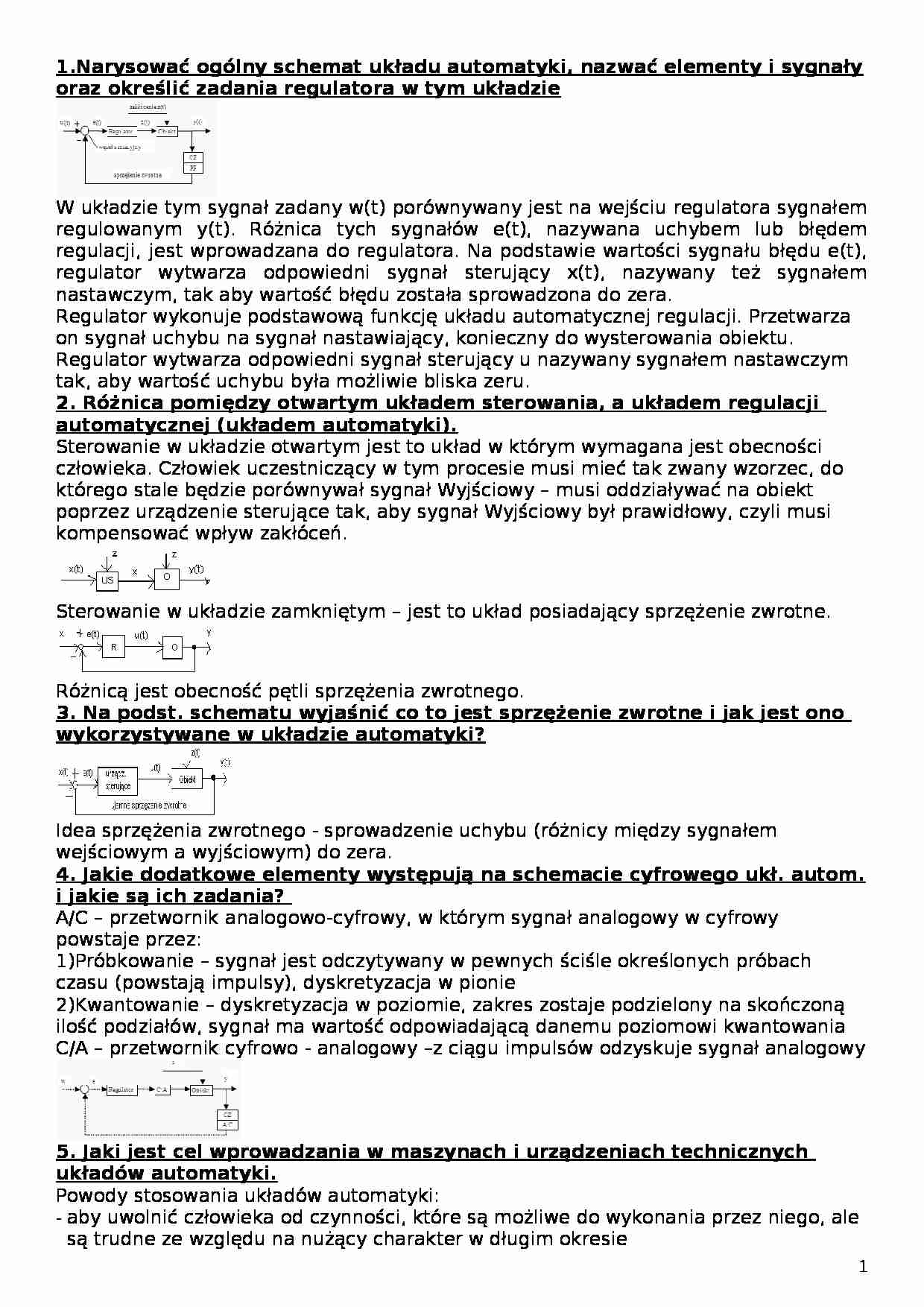
3. Na podst. schematu wyjaśnić co to jest sprzężenie zwrotne i jak jest ono wykorzystywane w układzie automatyki?
Idea sprzężenia zwrotnego polega na tym, że sygnał WY układu jest kierowany z powrotem na wejście. Daje to możliwość kontrolowania wyjścia i oddziaływania na wejście w zależności co dzieje się na wyjściu. Następuje porównanie sygnału We i Wy, a różnica tych sygnałów stanowi sygnał uchybu (e) przetwarzany przez urządzenie sterujące na sygnał sterujący u(t) o takiej wartości , aby sprowadzić sygnał uchybu e(t) do zera.
6. Jaki układ autom. nazywamy ukł. liniowym i jego najważniejsze cechy?
Układy liniowe - układy, które zawierają wyłącznie elementy liniowe, tzn. elementy o prostoliniowych charakterystykach statycznych, opisywane są za pomocą liniowych równań algebraicznych, różniczkowych, różnicowych lub całkowych. Elementy i układy liniowe spełniają zasadę superpozycji, tzn. odpowiedź na wymuszenie. Zasada superpozycji jeżeli na układ działa wiele wymuszeń jednocześnie to odpowiedź układu stanowi sumę odpowiedzi na każde z wymuszeń rozpatrywanych oddzielnie (przy założeniu, że pozostałe nie oddziałują). 7. Układy regulacji stałowartościowej (stabilizującej) - sygnał sterujący ma stałą raz nastawiona wartość x0=const. W procesie regulacji układ ma za zadanie utrzymywać stała wartość sygnału regulowanego y równą x0 mimo działających zakłóceń (układ regulacji automatycznej prędkości obrotowej)
8. Układ regulacji programowej - szczególny przypadek układu nadążnego. Sygnał sterujący zmienia się wg pewnego programu, określonego nadaną z góry funkcją czasu. Zadaniem układu jest odwzorowanie na wyjściu układu wygenerowanego przebiegu np. układ regulacji programowej regulacji temperatury w piecach hutniczych. 9. Układy nadążne - to zamknięte układy sterowania, sygnał sterujący x0 jest nieznaną funkcją czasu. Zmiiany sygnału sterującego x
(…)
….
Transmitancja operatorowa regulatora PID
Idealnego: G(s)PID=kp+1/(Ti*s) +Td*s
Rzeczywistego: G(s)PID=kp +1/(Ti*s) +Td*s/(T*s+1)
kp - współ. Wzmocnienia regulatora; Ti-stała czasowa całkująca; Td- stała czasowa różniczkowania T-stała czasowa
Właściwy dobór nastaw pozwala otrzymać żądaną wartość:
-statycznego błędu regulacji
-przeregulowania Cur
-czas regulacji Trr
Regulator P - nie eliminuje błędu statycznego…
…. W jaki sposób można zmniejszyć amplitudę drgań ustalonych wielkości regulowanej w układzie regulacji dwustawnej z regulatorem z histerezą i jak wówczas zmieniać się będzie częstotliwość przełączeń przekażnika?
Zmniejszenie amplitudy oscylacji wielkości regulowanej w układzie regulacji dwustawnej można uzyskać dzięki zastosowaniu regulatora z korekcyjnym sprzężeniem zwrotnym.
Stała czasowa T członu inercyjnego w sprzężeniu…
… poprawienia jakości regulacji jest zastosowanie układu z korekcją z ujemnym sprzężeniem zwrotnym, co powoduje zmianę sygnału błędu e(t). Wówczas przełączenia przekaźnika będą częstsze niż bez korekcji.
Zmniejszenie amplitudy oscylacji wielkości regulowanej w układzie regulacji dwustawnej można uzyskać dzięki zastosowaniu regulatora z korekcyjnym sprzężeniem zwrotnym.
Stała czasowa T członu inercyjnego…
… proporcjonalna, Ti - akcja całkująca, Td - akcja różniczkująca. Aby regulator PID stał się regulatorem P należy: TiTimax, TdTdmin, wtedy pozostanie tylko akcja proporcjonalna (P).
22. Co nazywamy charakterystyką amplitudowo-fazową elementu lub układu automatyki i w jaki sposób możemy określić wzmocnienie i przesunięcie fazowe dla danej wartości pulsacji?
Charakterystyką amplitudowo-fazową nazywamy graficzne…
… przedstawienie (wykres) transmitancji widmowej układu.
Moduł transmitancji widmowej określa wzmocnienie, a określa kąt przesunięcia.
30.Wielkości wykorzystywane do oceny jakości regulacji
- błąd (odchyłka) statystyczna -jest to różnica pomiędzy wartością zadaną a wartością wyjściową w stanie ustalonym;
-przeregulowanie bezwzględne - jest to maksymalne odchylenie odpowiedzi układu od wartości w stanie ustalonym…
… regulacji
Im silniej tłumione są przebiegi oscylacyjne, tym mniejsza jest wartość przeregulowania. Przeregulowanie rośnie w miarę zbliżania się do granicy stabilności, aby osiągnąć 100% na tej granicy.
Czas regulacji - to czas jaki upłynął od momentu wystąpienia skokowej zmiany wartości zadanej (lub zakłócenia) do ustalenia się uchybu e(t) od 2 do 5% amplitudy em wokół wartości uchybu ustalonego…
… charakterystycznego charakterystyki i ich wpływ na czynnik est przy t →∞ można stwierdzić, że dla układu stabilnego pierwiastki leżą w lewej półpłaszczyźnie płaszczyzny pierwiastków (liczb zespolonych), stąd kryterium stabilności.
Układ regulacji automatycznej jest stabilny jeżeli wszystkie pierwiastki równania charakterystyki leżą w lewej półpłaszczyźnie płaszczyzny pierwiastków. Ze względu na trudność obliczenia…
... zobacz całą notatkę
Komentarze użytkowników (0)