To tylko jedna z 10 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę
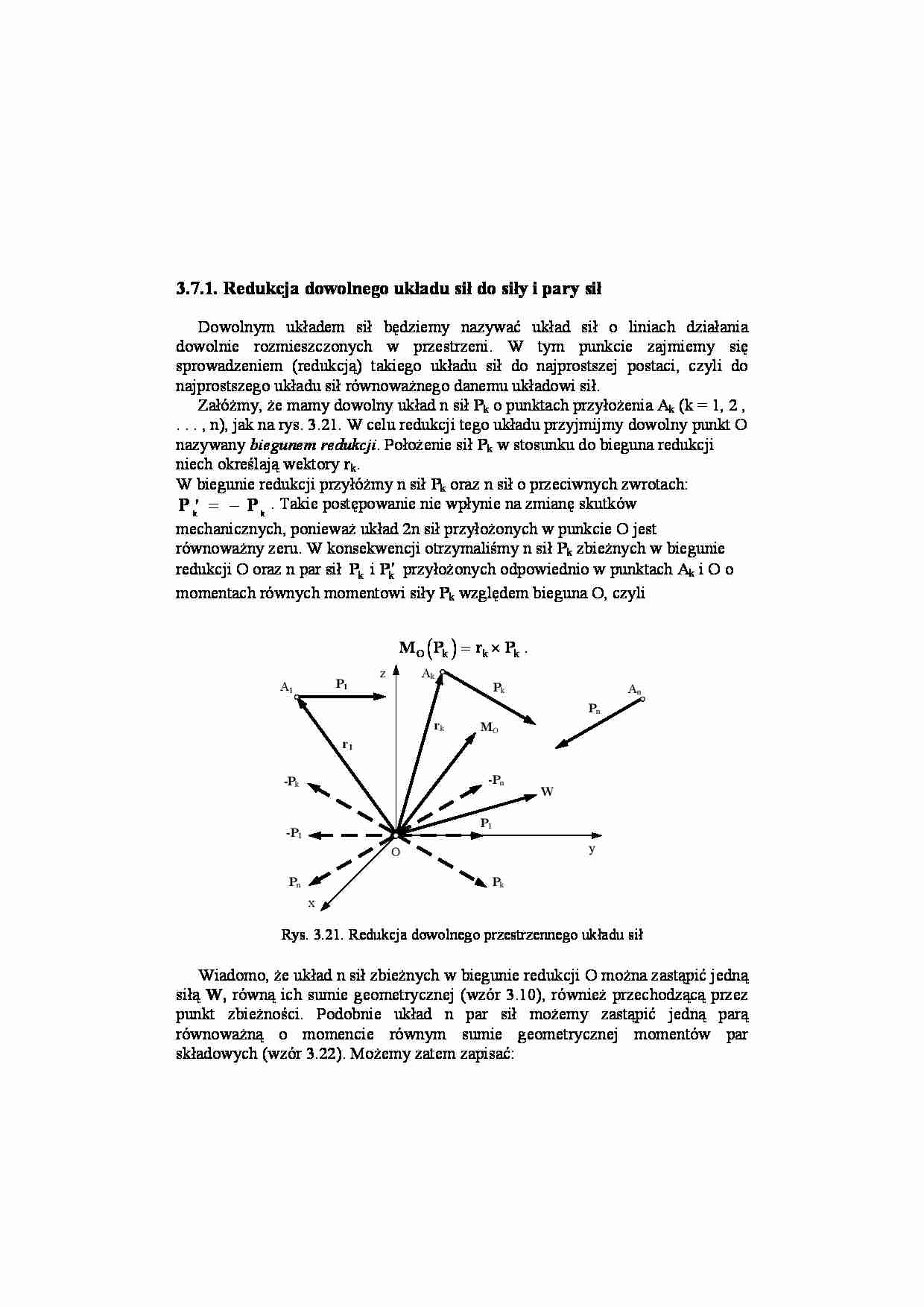


3.7.1. Redukcja dowolnego układu sił do siły i pary sił Dowolnym układem sił będziemy nazywać układ sił o liniach działania dowolnie rozmieszczonych w przestrzeni. W tym punkcie zajmiemy się sprowadzeniem (redukcją) takiego układu sił do najprostszej postaci, czyli do najprostszego układu sił równoważnego danemu układowi sił. Załóżmy, że mamy dowolny układ n sił P k o punktach przyłożenia Ak (k = 1, 2 , . . . , n), jak na rys. 3.21. W celu redukcji tego układu przyjmijmy dowolny punkt O nazywany biegunem redukcji . Położenie sił P k w stosunku do bieguna redukcji niech określają wektory r k. W biegunie redukcji przyłóżmy n sił P k oraz n sił o przeciwnych zwrotach: . Takie postępowanie nie wpłynie na zmianę skutków mechanicznych, ponieważ układ 2n sił przyłożonych w punkcie O jest równoważny zeru. W konsekwencji otrzymaliśmy n sił P ′ = − P k P k k k zbieżnych w biegunie redukcji O oraz n par sił przyłożonych odpowiednio w punktach A P P k i ′ k i O o momentach równych momentowi siły P k względem bieguna O, czyli ( ) M P r P O k k k = × . O r k Ak z y A1 An P 1 P k P n - P k - P 1 - P n P1 P k P n W M O x r1 Rys. 3.21. Redukcja dowolnego przestrzennego układu sił Wiadomo, że układ n sił zbieżnych w biegunie redukcji O można zastąpić jedną siłą W, równą ich sumie geometrycznej (wzór 3.10), również przechodzącą przez punkt zbieżności. Podobnie układ n par sił możemy zastąpić jedną parą równoważną o momencie równym sumie geometrycznej momentów par składowych (wzór 3.22). Możemy zatem zapisać: ( ) ⎪ ⎪ ⎭ ⎪⎪ ⎬ ⎫ × = = = ∑ ∑ ∑ = = = , P r P M M , P W 1 1 1 n k k k n k k O O n k k (3.24) Siłę W nazywamy wektorem głównym , a moment M O momentem głównym . Definicje wektora głównego i momentu głównego możemy ująć słownie: Wektorem głównym układu sił nazywamy sumę geometryczną wszystkich sił przyłożoną w dowolnie obranym biegunie redukcji O: W P = = ∑ k k n 1 . P k . P k (3.25) Momentem głównym układu sił względem bieguna redukcji O nazywamy sumę geometryczną momentów wszystkich sił względem tego bieguna: M r O k k n = × = ∑ 1 (3.26) Na podstawie powyższych rozważań możemy stwierdzić, co następuje: Dowolny układ sił działających na ciało sztywne można zastąpić układem
(…)
… układzie
współrzędnych będą równe zeru. Zatem, aby wektory (3.30) były równe zeru, ich współrzędne
wyrażone wzorami (3.27) i (3.28) muszą być równe zeru. Stąd otrzymujemy sześć równań równowagi:
n
n
n
⎫
Pkx = 0,
Pky = 0,
Pkz = 0, ⎪
⎪
k =1
k =1
k =1
(3.33)
⎬
n
n
n
⎪
M kx = 0,
M ky = 0,
M kz = 0.
⎪
k =1
k =1
k =1
⎭
∑
∑
∑
∑
∑
∑
Aby dowolny układ sił był w równowadze, sumy rzutów wszystkich sił na trzy osie układu
współrzędnych oraz sumy momentów wszystkich sił względem tych osi muszą być równe zeru.
Z otrzymanych równań równowagi (3.33) wynika, że w zagadnieniach dotyczących równowagi
ciała sztywnego poddanego działaniu dowolnego układu sił możemy wyznaczyć sześć niewiadomych.
W przypadku większej liczby niewiadomych mamy do czynienia z zagadnieniem statycznie
niewyznaczalnym, którego nie można rozwiązać na gruncie statyki ciała sztywnego.
Równania równowagi (3.33) dotyczą dowolnego przestrzennego układu sił i jako takie zawierają w
sobie warunki równowagi prostszych układów sił. Przykładowo dla przestrzennego zbieżnego układu
sił omówionego w p. 3.4 moment główny względem punktu zbieżności będzie równy zeru, czyli
równania momentów będą tożsamościowo spełnione, a zatem otrzymamy tylko trzy równania…
… i sprowadzeniu do wspólnego
mianownika możemy napisać:
W ( W ⋅ M O ) − M O ( W⋅ W )
SO × W =
.
W2
Licznik po prawej stronie jest rozwinięciem podwojonego iloczynu wektorowego
(2.34). Po odpowiednim przestawieniu wyrazów po lewej stronie mamy
ostatecznie:
W × OS =
W× (W× M O )
.
(3.39)
W2
Łatwo sprawdzić, że ogólne rozwiązanie tego równania wektorowego ma
postać:
OS =
(W× M O ) + λ W ,
W2
(3.40)
gdzie λ…
... zobacz całą notatkę
Komentarze użytkowników (0)