To tylko jedna z 13 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę
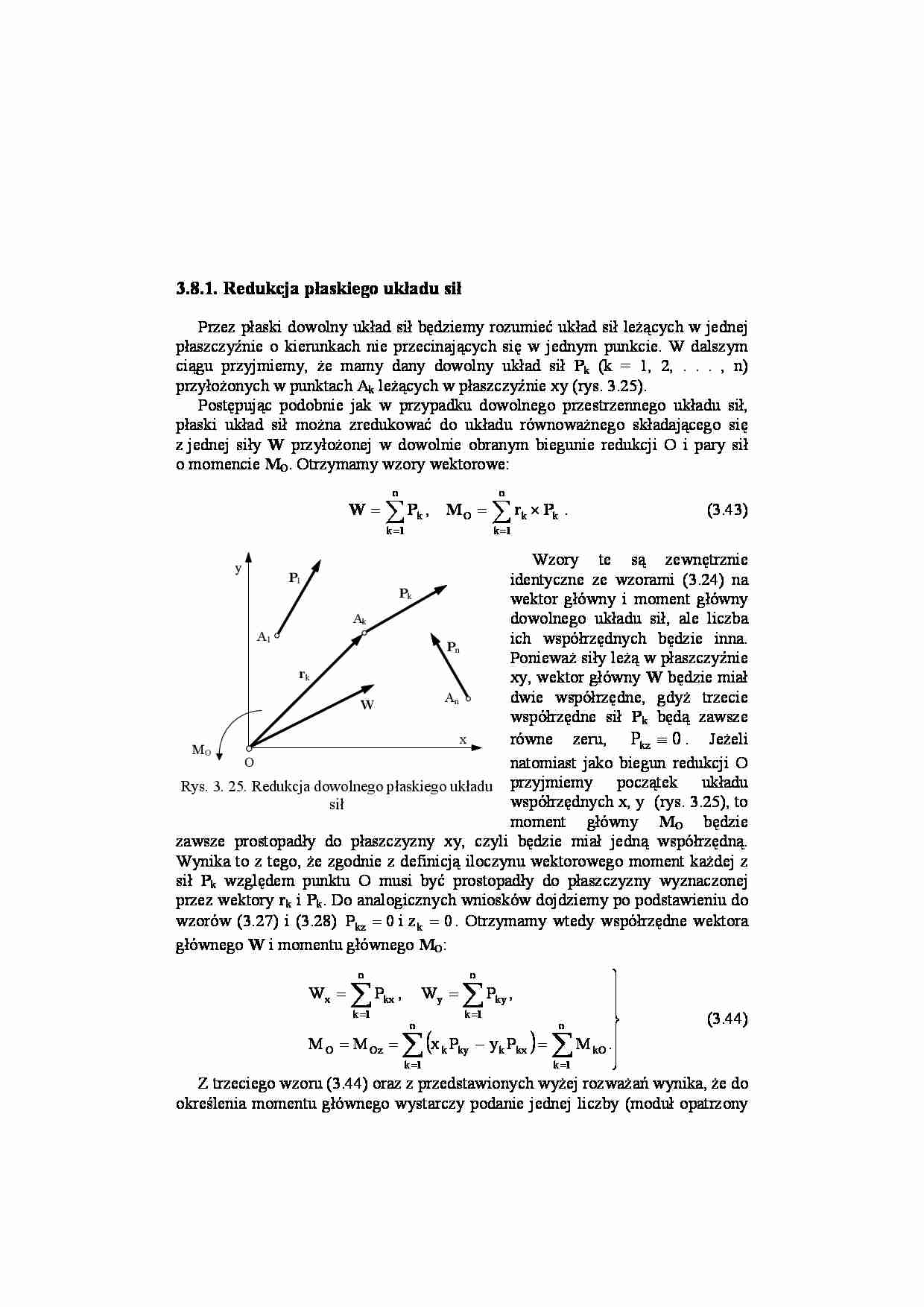


3.8.1. Redukcja płaskiego układu sił Przez płaski dowolny układ sił będziemy rozumieć układ sił leżących w jednej płaszczyźnie o kierunkach nie przecinających się w jednym punkcie. W dalszym ciągu przyjmiemy, że mamy dany dowolny układ sił P k (k = 1, 2, . . . , n) przyłożonych w punktach Ak leżących w płaszczyźnie xy (rys. 3.25). Postępując podobnie jak w przypadku dowolnego przestrzennego układu sił, płaski układ sił można zredukować do układu równoważnego składającego się z jednej siły W przyłożonej w dowolnie obranym biegunie redukcji O i pary sił o momencie M O. Otrzymamy wzory wektorowe: W P M r = = = = ∑ ∑ k k n O k k n 1 1 , P × k 0 . (3.43) Wzory te są zewnętrznie identyczne ze wzorami (3.24) na wektor główny i moment główny dowolnego układu sił, ale liczba ich współrzędnych będzie inna. Ponieważ siły leżą w płaszczyźnie xy, wektor główny W będzie miał dwie współrzędne, gdyż trzecie współrzędne sił P k będą zawsze równe zeru, . Jeżeli natomiast jako biegun redukcji O przyjmiemy początek układu współrzędnych x, y (rys. 3.25), to moment główny M P kz ≡ O będzie zawsze prostopadły do płaszczyzny xy, czyli będzie miał jedną współrzędną. Wynika to z tego, że zgodnie z definicją iloczynu wektorowego moment każdej z sił P k względem punktu O musi być prostopadły do płaszczyzny wyznaczonej przez wektory r k i P k. Do analogicznych wniosków dojdziemy po podstawieniu do wzorów (3.27) i (3.28) P i z kz k = = 0 0 . Otrzymamy wtedy współrzędne wektora głównego W i momentu głównego M O: MO r k P n P k P 1 An Ak A1 O y x W Rys. 3. 25. Redukcja dowolnego płaskiego układu sił ( ) ⎪ ⎪ ⎭ ⎪ ⎪ ⎬ ⎫ = − = = = = ∑ ∑ ∑ ∑ = = = = . M P y P x M M , P W , P W n 1 k kO n 1 k kx k ky k Oz O n 1 k ky y n 1 k kx x (3.44) Z trzeciego wzoru (3.44) oraz z przedstawionych wyżej rozważań wynika, że do określenia momentu głównego wystarczy podanie jednej liczby (moduł opatrzony znakiem), czyli moment płaskiego układu sił można traktować podobnie jak skalar. W tej sytuacji mówiąc o momencie głównym w płaskim układzie sił, będziemy mieć na myśli tylko jego wartość algebraiczną. 3.8.2. Szczególne przypadki płaskiego układu sił Układ równoważny wypadkowej W punkcie 3.7.4 udowodniliśmy, że jeżeli moment główny
(…)
…. Kierunki reakcji RB i RD są znane, ponieważ linie
działania tych reakcji są prostopadłe do płaszczyzny, po której mogą się przesuwać
podpory B i D. W omawianym przykładzie reakcje te będą miały kierunek
pionowy, a więc prostopadły do osi belki. Mamy zatem sześć niewiadomych RAx,
RAy, RB, RCx, RCy i RD, czyli tyle, ile równań daje nam statyka.
Równania równowagi dla lewej części belki:
∑P
∑P
∑M
kx
= R Ax…
… na myśli tylko jego wartość algebraiczną.
3.8.2. Szczególne przypadki płaskiego układu sił
Układ równoważny wypadkowej
W punkcie 3.7.4 udowodniliśmy, że jeżeli moment główny MO jest prostopadły
do wektora głównego W (3.42), to układ sił można zredukować do jednej siły
wypadkowej działającej wzdłuż osi centralnej. W poprzednim punkcie
wykazaliśmy, że warunek ten jest zawsze spełniony. Wynika…
… są równocześnie równe
zeru, to układ sił jest w równowadze. Zatem wektorowe warunki równowagi
możemy zapisać następująco:
W = 0, M O = 0 .
(3.50)
Po przyrównaniu do zera współrzędnych wektora głównego (3.44) otrzymamy trzy
równania równowagi:
n
∑P
kx
n
= 0,
k =1
∑P
ky
n
= 0,
k =1
∑M
kO .
(3.51)
k =1
Należy tutaj zaznaczyć, że punkt O, względem którego obliczamy sumę
momentów danych sił, nie musi być początkiem…
... zobacz całą notatkę
Komentarze użytkowników (0)