To tylko jedna z 3 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę


PRZEDMIOT KINEMATYKI I DYNAMIKI UKŁADÓW:
a) Kinematyka
czasoprzestrzeń Galileusza R x R3 R3 X={x1,x2,x3}
Y={y1,y2,y3}
Ruch punktu materialnego jest to przekształcenie czasu w przestrzeń :
X:R→R3 (I ⊂ R x:I→R3 ) I - interwał
Trajektoria funkcja czasu podająca położenie punktu w każdej chwili
ciągła!!!!!!!!!
odpowiednio gładka
miara długości
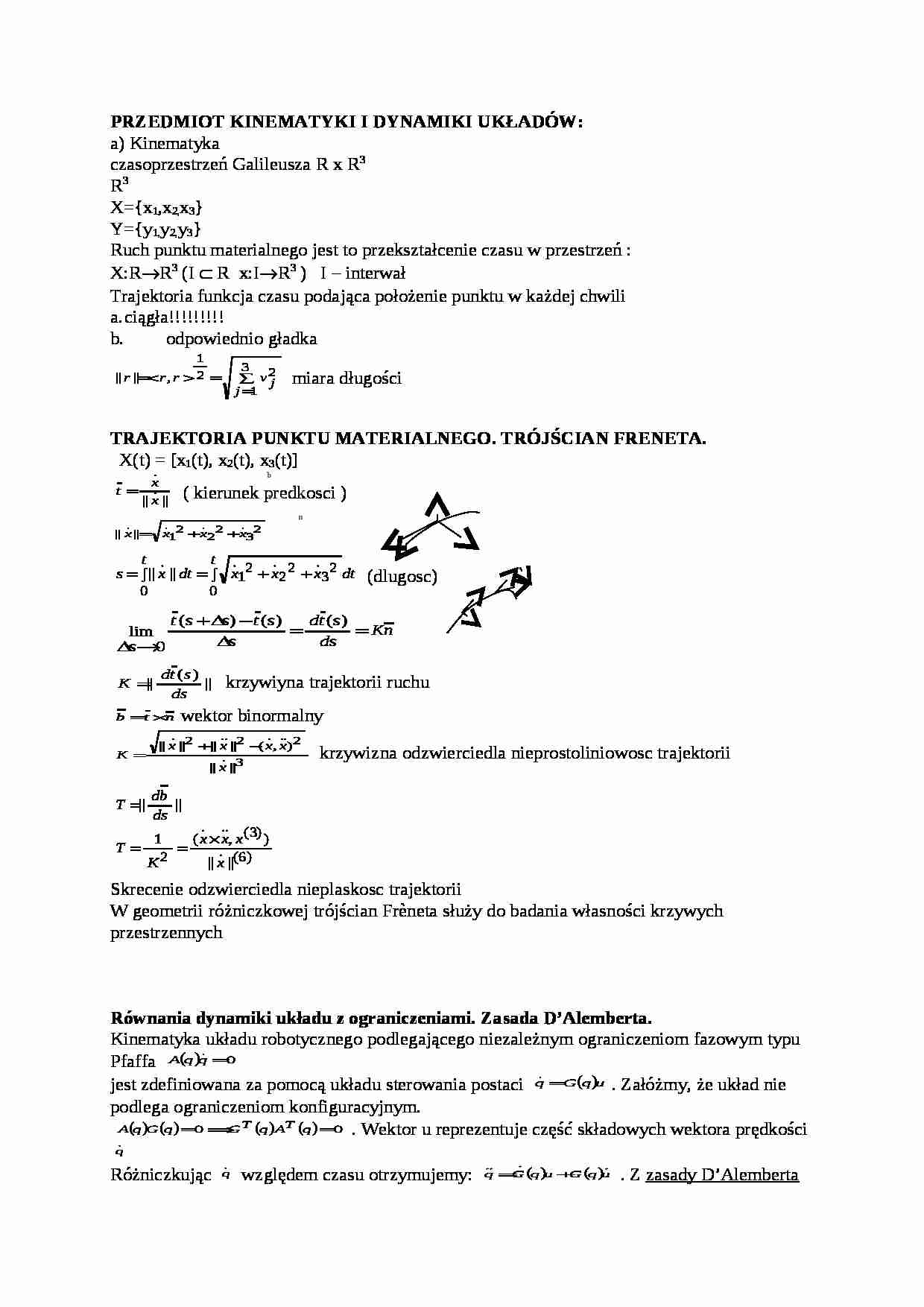
TRAJEKTORIA PUNKTU MATERIALNEGO. TRÓJŚCIAN FRENETA.
X(t) = [x1(t), x2(t), x3(t)]
( kierunek predkosci )
(dlugosc)
krzywiyna trajektorii ruchu
wektor binormalny
krzywizna odzwierciedla nieprostoliniowosc trajektorii
Skrecenie odzwierciedla nieplaskosc trajektorii
W geometrii różniczkowej trójścian Frèneta służy do badania własności krzywych przestrzennych
Równania dynamiki układu z ograniczeniami. Zasada D'Alemberta.
Kinematyka układu robotycznego podlegającego niezależnym ograniczeniom fazowym typu Pfaffa jest zdefiniowana za pomocą układu sterowania postaci . Załóżmy, że układ nie podlega ograniczeniom konfiguracyjnym. . Wektor u reprezentuje część składowych wektora prędkości Różniczkując względem czasu otrzymujemy: . Z zasady D'Alemberta
(siły uogólnione F zapewniające spełnienie ograniczeń fazowych nie wykonują pracy na dopuszczalnych przemieszczeniach) wynika,
że oraz, że (dla λ∈Rl) ⇒ . Z zależności ,
zakładając, że F=T+u otrzymujemy . Mnożąc obie strony równania przez GT(q) otrzymujemy: .
Podstawiając za oraz za otrzymujemy równania dynamiki układu nieholonomicznego postaci:
PĘD. MOMENT PĘDU I ENERGIA UKŁADU PUNKTÓW MATERIALNYCH
Pęd punktu Pęd układu Prędkość zmiany pędu ukłądu jest równa wypadkowej sił zewnętrznych działających na układ. Jeżeli jest równa 0, to P=const.
Moment pędu(kręt) Moment układu Prędkość zmiany momentu pędu układu równa się wypadkowemu momentowi sił zewnętrznych działających na układ. Jeśli jest równa 0, to M=const.
Energia kinetyczna: Energia układu Prędkość zmiany energii kinetycznej układu, jest równa sumie wszystkich mocy układu.
Energia potencjalna V(x)
Siła Fi jest potencjalna, jeżeli Energia całkowita E=K+V
(…)
…. Jeżeli jest równa 0, to P=const.
Moment pędu(kręt) Moment układu Prędkość zmiany momentu pędu układu równa się wypadkowemu momentowi sił zewnętrznych działających na układ. Jeśli jest równa 0, to M=const.
Energia kinetyczna: Energia układu Prędkość zmiany energii kinetycznej układu, jest równa sumie wszystkich mocy układu.
Energia potencjalna V(x)
Siła Fi jest potencjalna, jeżeli Energia całkowita E=K+V
b
t
n
s
…
... zobacz całą notatkę
Komentarze użytkowników (0)