

Fragment notatki:
Porównać własności pomp wirowych i wyporowych .
Pompy wirowe : Zalety
- Duża wydajność przy stosunkowo niewielkiej a w szczególnych przypadkach średniej wysokości podnoszenia
- Dzięki dużej prędkości obrotowej małe wymiary a przez to małe pomieszczenia posadowienia
- Całkowita równomierność ruchu przy ustalonych warunkach pracy
- Bezpośrednie sprzężenie z szybkobieżnymi silnikami napędowymi
- duża niezawodność dzięki zwartej budowie i bardzo małej liczbie ruchomych zużywających części
- zdolność samoregulacji tzn. samoczynnego przystosowania się do zmienionych warunków pracy
Wady - Bark zdolności samozasysania powodującej konieczność napełnienia pompy cieczą przed uruchomieniem
- wrażliwość małych pomp wirowych na zanieczyszczenia mechaniczne
- wrażliwość na zawartość gazów w pompowanej cieczy co może powodować przerwanie przepływu
- mniejszą w porównaniu z niektórymi pompami wyporowymi sprawność małych pomp wirowych .
Pompy wyporowe : Zalety
- Bardzo duża wysokość podnoszenia
- niezmienna (w pewnym czasie) wydajność przy zmieniających się warunkach pracy układu
- stosunkowo duża sprawność zwłaszcza pomp nurnikowych
- zdolność do samozasysania
- mała wrażliwość na zawartość gazów w pompowanej cieczy
Wady – ograniczona wydajność
- nierównomierność parametrów pracy pomp wyporowych o postępowo-zwrotnym ruchu organu roboczego
- zmniejszoną pewność ruchu pomp mających układ ruchomych części
- duży wpływ technologii wykonania ( szczelności) na sprawność pomp
- wrażliwość niektórych rodzajów pomp na zanieczyszczenia mechaniczne
- większa podatność na awarię (duża liczba ruchomych części)
- wysokie wymagania technologiczne, wyższe koszty.
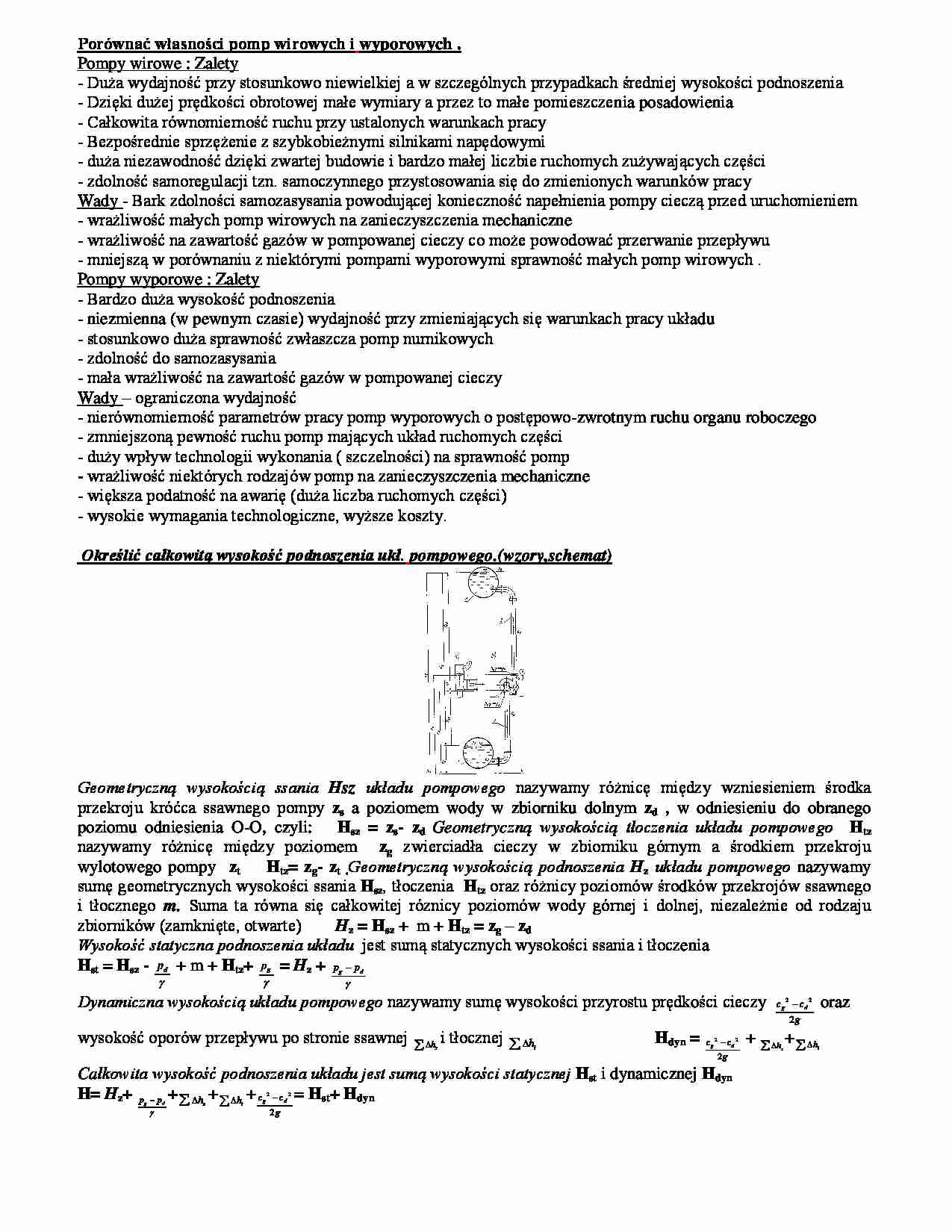
Określić całkowitą wysokość podnoszenia ukł. pompowego.(wzory,schemat)
Geometryczną wysokością ssania Hsz układu pompowego nazywamy różnicę między wzniesieniem środka
przekroju króćca ssawnego pompy zs a poziomem wody w zbiorniku dolnym zd , w odniesieniu do obranego
poziomu odniesienia O-O, czyli: Hsz = zs- zd Geometryczną wysokością tłoczenia układu pompowego Htz
nazywamy różnicę między poziomem zg zwierciadła cieczy w zbiorniku górnym a środkiem przekroju
wylotowego pompy zt
Htz= zg- zt .Geometryczną wysokością podnoszenia Hz układu pompowego nazywamy
sumę geometrycznych wysokości ssania Hsz, tłoczenia Htz oraz różnicy poziomów środków przekrojów ssawnego
i tłocznego m. Suma ta równa się całkowitej róznicy poziomów wody górnej i dolnej, niezależnie od rodzaju
zbiorników (zamknięte, otwarte)
Hz = Hsz + m + Htz = zg – zd
Wysokość statyczna podnoszenia układu jest sumą statycznych wysokości ssania i tłoczenia
Hst = Hsz - p + m + Htz+ p = Hz + p p
g
d
g
d
Dynamiczna wysokością układu pompowego nazywamy sumę wysokości przyrostu prędkości cieczy
oraz
c g 2 cd 2
2g
wysokość oporów przepływu po stronie ssawnej h i tłocznej h
s
t
Hdyn =
c g 2 cd 2
2g
Całkowita wysokość podnoszenia układu jest sumą wysokości statycznej Hst i dynamicznej Hdyn
H= Hz+ p p + h + h + c c = Hst+ Hdyn
2
g
d
s
t
2
g
d
2g
+
h
s
+ h
t
9.Przedstawić przepływ cieczy idealnej przez idealny wirnik pompy odśrodkowej (trójkąty prędkości)
Podczas przepływu cieczy przez wirnik pompy odśrodkowej cząsteczki cieczy poruszają się odśrodkowo w
płaszczyznach prostopadłych do osi obrotu wirnika, wzajemnie do siebie przystających. Przy nieskończenie
wielkiej liczbie łopatek wszystkie cząsteczki poruszają się po torach bezwzględnych (w stosunku do kadłuba) oraz
po torach względnych (w stosunku do wirnika) do siebie przystających, w konsekwencji czego będziemy
rozpatrywać ruch tylko jednej cząsteczki cieczy.
Biorąc pod uwagę wirnik pompy odśrodkowej przedstawiony na rysunku , obracający się z prędkością kątową .
Odróżniamy tu ruch cieczy bezwzględny z prędkością C, w odniesieniu do nieruchomego układu , np. kadłuba
pompy i ruch względny z prędkością w, w odniesieniu do ruchomego układu wirnika. Torem bezwzględnym ruchu
jest linia A’1 A’2 , zaś torem względnym ruchu cząsteczki linia A1 A2. Prędkości bezwzględne na wlocie c1 i na
wylocie c2 są wypadkowymi prędkości unoszenia (obwodowe) u1= r1 i u2= r2 oraz prędkości względnych w1 i
w2.
Te same prędkości możemy rozłożyć na składowe południkowe c m1 i cm2 oraz obwodowe cu1 i cu2. Kąty 1 i 2
określają nachylenie wektorów prędkości bezwzględnych c1 i c2 do prędkości unoszenia u i u , zaś kąty i
nachylenie wektorów prędkości względnych w i w do kierunku unoszenia. i są jednocześnie kątami nachylenia
łopatek na wlocie i na wylocie wirnika.
W większości przypadków = 90 o , tzn. że ciecz dopływa do wirnika bez zawirowania. Wtedy cu1 = 0 i c1
pokrywa się z cm1.
1
1
1
2
2
1
2
2
1
11. Omówić podobieństwo dynamiczne pomp wirowych
Teoria podobieństwa dynamicznego pomp wirowych określa związki , jakie występują między pompami o
różnej wielkości i różnych parametrach , jeżeli są spełnione warunki podobieństwa . teoria ta stwarza
szerokie możliwości przenoszenia wyników prób i badań z pomp modelowych na pompy robocze i na tej
podstawie pozwala na dokładne określenie parametrów ich pracy .
Podobieństwo dynamiczne występują wówczas , gdy spełnione jest podobieństwo geometryczne i
kinematyczne .
Podobieństwo geometryczne dwu pomp występuje wówczas , gdy wszystkie kanały przepływowe jednej
pompy ( komora ssawna , wirnik , elementy odprowadzające ciecz z wirnika itp. ) stanowią wierne
geometryczne pomniejszenie lub powiększenie drugiej pompy . Muszą być spełnione podstawowe warunki
podobieństwa:
- ten sam stosunek odpowiadających sobie wymiarów liniowych obu pomp ,
- liczba łopatek wirnika i kierownic , ich kształt i rozmieszczenie jednakowe dla obu pomp ,
- kąty nachylenia łopatek wirnika i kierownic na wlocie i na wylocie te same ,
- ta sama chropowatość względna ścian kanałów przepływowych obu pomp ,
Należy zwrócić uwagę , że ostatni warunek nie zawsze jest spełniony gdyż wymagałby trudno osiągalnych
dużych gładkości ścian małych pomp modelowych w porównaniu do pomp dużych, roboczych .
Warunkiem zachowania podobieństwa kinematycznego dwu pomp jest podobieństwo geometryczne pól
prądu w obu przepływach .
Dwie pompy geometrycznie podobne przy tej samej prędkości.
d1, d2, Q1, Q2, H1, H2, P1, P2, V1, V2, h1, h2,1, 2, 1 = 2,
n = const.
Prędkość unoszenia
u
dn
60
u ~d
, u ~ w ~ c ~ cm ~ d
2
2
H1 h1 u1 d1 h1 d1
H 2 h 2 u 2 d 2 h 2 d 2
3
Q ~ A. c m Q ~ d 2
P d1
1
P2 d 2
5
Q1 d 1 h1 d 1
Q2 d 2 h 2 d 2
3
2
Dwie pompy geometrycznie podobne przy dwóch różnych prędkościach obrotowych.
H n 2 d 2
1 1 1
H 2 n2 d 2
3
Q1 n1 d1
Q n d
2
2 2
P n1
1
P2 n2
2
d1
..... - możoż obliczyć
d2
5
d
1 Po przekształceniu układu równań:
d
2
n1 Q2
n 2 Q1
1
2
H
1
H
2
3
4
Dzięki tej zależności możemy porównać parametry pompy modelowej i rzeczywistej.
12. Kinematyczny wyróżnik szybkobieżności – jego znaczenie dla pomp wirowych .
W sposób jednoznaczny kształt wirników pomp wirowych określa wielkość n sQ = f(Q,H,n) zwana
wyróżnikiem szybkobieżności pompy .
Wzór na kinematyczny wyróżnik szybkobieżności .
n1 nsQ
nQ1 / 2
n
3/ 4
H
H
Q
H
Kinematyczny wyróżnik szybkobieżności nsQ pompy wirowej roboczej o parametrach Q , H , n jest to
prędkość obrotowa pompy wirowej teoretycznie podobnej , która przy wysokości podnoszenia H1 = Hs = 1m
ma wydajność Q1 = Qs = 1 m3/s .Należy podkreślić , że dla konkretnych wartości Q , H , n pompy roboczej
istnieje tylko jedna wartość wyróżnika szybkobieżności n sQ , przy czym wartość ta zależy od wzajemnego
stosunku wielkości Q , H , n.
Zatem określona wartość wyróżnika szybkobieżności n sQ jest ściśle związana z określonym kształtem
wirnika .
Kinematyczny wyróżnik szybkobieżności nsQ ma charakter uniwersalny , [ponieważ jego wartość nie zależy
ani od rodzaju cieczy ( jej gęstości ) ani od wartości pola grawitacyjnego g.
13. Przepływ cieczy rzeczywistej przez wirnik o skończonej liczbie łopatek .
Występuje:
- zawirowanie – w kanale międzyłopatkowym – tłumaczone bezwładnością cieczy,
- ruch względny wirujący – drugi rodzaj zawirowań w kanale międzyłopatkowym,
- zmniejszenie prędkości w na wylocie ma znaczenie (Hth – jest mniejsze)
H th
1
u2cu 2 u1cu1
g
- dla nieskończonej liczby łopatek
1
u 2 cu 3 u1cu1 - dla skończonej liczby łopatek.
g
u
H
H th H th 2 cu 2 cu 3 p H th
1 p th
g
H th
H th
p – współczynnik odniesiony do Hth (wprowadził do Pheiderer), nazywany często współczynnikiem zmniejszenia
poboru mocy (niewykorzystania mocy).
p = 0,3.... czyli ponad 30% jest odchylona teoria Eulera (teoretyczna) od rzeczywistego przepływu cieczy przez
wirnik o skończonej liczbie łopatek.
Rzeczywista liczba łopatek jest najczęściej: 5 do 8, w skrajnych przypadkach 1,2,3. Im ciecz jest gęstsza (im
bardziej zanieczyszczona) tym mniejsza liczba łopatek. Liczba łopatek na ogół nie zależy od wielkości pompy.
18. Przedstawić kierownicę odśrodkową .
Kierownica odśrodkowa jest stosowana w pompach odśrodkowych jedno- i wielostopniowych , oraz w
pompach diagonalnych. W pompach wielostopniowych zaś jest stosowana kierownica dośrodkowa połączona
przewałem z kierownicą dośrodkową.
Odśrodkowa kierownica łopatkowa składa się z łopatek tworzących rozszerzające się kanały , w których
następuje zmniejszenie prędkości cząsteczki cieczy , oraz zmiana jej toru . W przypadku łopatek ich
zadaniem jest skrócenie toru cząsteczki i zwiększenie kąta . Uwzględniając nierównomierny rozkład
prędkości w przekroju wlotowym do kierownicy , pewne wtórne prądy między kierownicą oraz wpływ
kontrakcji za pomocą doświadczalnego współczynnika otrzymujemy wzór na kąt nachylenia łopatki
4
kierowniczej : tg4 = [t4 / ( t4 – Sn4 )]*tg 4 gdzie:
t4 – podziałka na promieniu r4
Kąt nachylenia g krawędzi wlotowej łopatki kierownicy dośrodkowej powinien być większy od kąta 7
strugi przed łopatką z uwagi na zacieśnienie wlotu i zjawisko kontrakcji
Tg 8 =[ t8/( t8 – Sn8 )] * tg 7
20.Omówić charakterystykę wymiarową pomp.
a) odśrodkowej
Z przebiegu krzywej Pw = f ( Q ) widać , że najmniejszy pobór mocy występuje przy Q = 0. Przy większej
wydajności pobór mocy maleje . Jest to krzywa mocy nieprzeciążalna , przy ciągłym wzroście mocy krzywa
nosi nazwę przeciążalnej .
Krzywe przebiegu H = f ( Q ) mogą przebiegać bardziej płasko , wtedy wartość stosunku H/Q jest mała ,
lub bardziej stromo o dużej wartości H/Q. Pewien wpływ na różnice w przebiegu tych krzywych
wywierają kierownice . Wykres przedstawia kierownicę bezłopatkową . Ta właśnie pompa ma stateczną
charakterystykę H = ( Q ) w przeciwieństwie do tej samej pompy z kierownicą łopatkową .
b) Charakterystyka bezwymiarowa pomp helikoidalnych i diagonalnych.
Krzywa przepływu H = f ( Q ) nie ma nigdy odcinka niestatecznego lecz przeciwnie , przy małej
wydajności nie ma często przegięcia biegnąc bardziej stromo do góry przy wydajności malejącej do zera .
Krzywa poboru mocy wykazuje mniejsze różnice przy zmianie wydajności .
c) Charakterystyka wymiarowa pompy śmigłowej
Krzywa przepływu H = f ( Q ) oraz krzywa poboru mocy Pw = f ( Q ) pompy śmigłowej mają odmienny
kształt i przebieg niż w pompie odśrodkowej . Przy Q = 0 mają max. Wartości , gdy Q rośnie opadają dość
stromo w dół, a w ok. ½ Qn wykazują charakterystyczne przegięcie. Pomiar parametrów w pobliżu Q = 0 nie
przeprowadza się ze względu na obciążenie silnika. W punkcie Q = 0 występuje największy pobór mocy.
21. Narysować zestawienie charakterystyk bezwymiarowych pomp wirowych
Każdą indywidualną charakterystykę wymiarową można przekształcić na charakterystykę bezwymiarową
przez przeliczenie szeregu punktów krzywej , przyjmując nominalne wartości parametrów pracy za 1 lub
100 . Otrzymamy wtedy krzywe H / Hn = f ( Q / Qn ) , Pw / Pwn = f ( Q / Qn ) , / n = f ( Q / Qn ) .
Charakterystyki bezwymiarowe służą do porównania pomp , przy czym w przypadku pomp o tym samym
wyróżniku szybkobieżności ich charakterystyki bezwymiarowe powinny się pokrywać lub wykazywać małe
rozbieżności .Odchylenia większe będą wskazywały na niejednakową jakość wykonania lub różnice w
konstrukcji części przepływowych obu pomp .
Charakterystyki bezwymiarowe są również pomocne przy projektowaniu pomp oraz układów pompowych z
pompami prototypowymi .
23.Przedstawić charakterystykę uniwersalną pompy – pagórek sprawności
Poziome odnoszące na ( rys.b ) przecinają wykresy sprawności w punktach ich jednakowych wartości .
Punkty przecięcia rzutujemy na odpowiadające im (o tej samej prędkości obr. N ) krzywe przepływu (rys.
a) i punkty na krzywych przepływu oznaczamy wartością sprawności . Łącząc punkty o jednakowej
sprawności otrzymamy szereg krzywych o stałej sprawności rzeczywistej = const. . Z powodu
podobieństwa otrzymanego wykresu do krzywych warstwicowych nazywamy go pagórkiem sprawności . Na
podstawie pagórka sprawności wyznaczamy łatwo optymalne param4etry pracy pompy , jako miejsce
środkowe krzywych sprawności określające wartość opt . Grzbiet pagórka tworzy linia łącząca punkty
maksymalnej sprawności , zaś szczyt pagórka odpowiada maksymalnej wartości sprawności opt , jaką może
osiągnąć pompa.
24.Wyjaśnić pojęcie pola stosowalności pompy przy stałej prędkości obrotowej ( typoszeregu pompy )
Polem stosowalności pompy nazywamy obszar, zakreślony na wykresie , który powstał w wyniku
naniesienia na niego pewnych ograniczeń . W pompach ( o stałej prędkości ) większe zastosowanie ma
pole stosowalności oparte o zmienność średnicy zewnętrznej ( wylotowej ) d2 wirnika . Ten sposób nie może
być zastosowany w pompach Śmigłowych . W wirniku pompy odśrodkowej zmniejszamy jego średnicę
zewnętrzną d2 na d2` przez stoczenie . Wykreślając na podstawie badań krzywe charakterystyczne , dla
szeregu średnic danej pompy oraz krzywe sprawności dla każdej średnicy , oraz zakładając minimalną
sprawność otrzymamy pole stosowalności pompy przy stałej prędkości obrotowej
28.Gdzie występują uszczelnienia w pompie wirowej – opisać uszczelnienia przywlotowe wirnika.
Wobec coraz wyższych parametrów pracy pomp obiegowych , coraz liczniejsze zastosowanie znajdują
pompy z uszczelnieniem wału . Pompy do ciśnienia p = 10 MPA buduje się z zerowym przeciekiem , a przy
wyższych ciśnieniach z przeciekiem kontrolowanym .Stosowane są 3 rodzaje uszczelnień :
-uszczelnienie pierścieniami pływającymi powodujące duże przecieki i straty mocy : stosowane jest jako
uszczelnienie wstępne do uszczelnień głównych
-uszczelnienie czołowe ślizgowe hydrodynamiczne polegające na odpowiednim ukształtowaniu powierzch
uszczelniających , w wyniku czego tworzą się warstewki klinowe smaru płynnego , umożliwiające powstanie
ciśnienia hydrodynamicznego , a współczynnik tarcia ulega kilkokrotnemu zmniejszeniu
-uszczelnienie ślizgowe czołowe hydrostatyczne polegające na wytworzeniu między pierścieniami
ślizgowymi ciśnienia rozwierającego je i również zmniejszającego współczynnik tarcia
Uszczelnienia hydrodynamiczne są stosowane przy ciśnieniach: p = 8 Mpa , zaś hydrostatyczne przy p = 10
– 15 Mpa na jeden stopień
29. Opisać uszczelnienia dławicowe sznurowe wału stosowane w pompach wirowych.
Dławnica składa się z komory dławnicowej, w którą są włożone pierścienie szczeliwa odciskane dławikiem do tulei
dławnicy oraz z wkładu dławnicowego. Ściskane szczeliwo wypełnia szczelnie komorę. Liczba pierścieni
uszczelniających wynosi 3 lub 4, a przy różnicy ciśnień powyżej p = 50 Pa więcej.
30. Opisać uszczelnienia czołowe mechaniczne.
Osiągają najwyższe parametry gdy są stosowane w pompach: max. ciśnienie pmax = 20 MPa, temp pracy (max) ~
650C, prędkość liniowa w miejscu styku uuszcz do 250 m/s. Są wielokrotnie droższe od uszczelnienia dławnicowego.
Ruchomy pierścień wykonany jest najczęściej z grafitu.
P
pierścień ślizgowy
sprężyna
dociskowa ruchomy
elastyczne
pierścienie
uszczelniające
pierścień
ślizgowy
nieruchomy
Ten typ uszczelnienia jest bardzo szczelny.
31.Co to jest kawitacja jej wpływ na pracę pompy.
Kawitacja : to tworzenie się pęcherzyków parowo-gazowych w wyniku obniżenia się ciśnienia statycznego
w cieczy poniżej wartości krytycznej odpowiadającej ciśnieniu wrzenia cieczy w danej temperaturze i późniejsze
ich gwałtowne zanikanie w obszarze wzrostu ciśnienia (jest to proces dwuetapowy). Kawitacji towarzyszą
uderzenia hydrauliczne, lokalne przyrosty ciśnień mogą sięgać 350MPa. Pojawiają się: hałas, drgania kadłuba.
Kawitacja zależy od : prędkości przepływu, wysokości ciśnienia wrzenia cieczy, kształtu kanałów
przepływowych, od temperatury.
Wpływ kawitacji na pracę pompy :
-w początkowej fazie kawitacji pojawiają się pierwsze pęcherzyki, co nie ma jeszcze istotnego wpływu na
pracę pompy.
- w fazie rozwiniętej kawitacji: drgania pompy, następuje spadek wysokości podnoszenia cieczy, wahania
ciśnienia na wlocie, spadek sprawności pompy.
- w trzeciej fazie bardzo silnej kawitacji następuje załamanie się charakterystyk (opadają pionowo w dół).
33.Omówić sposoby zapobiegania kawitacji.
SPOSOBY KONSTRUKCYJNE : mają na celu zmniejszenie prędkości na wirniku. W tym celu stosuje się
wirnik o powiększonym przekroju wlotowym.
- zastosowanie wirnika wstępnego typu śrubowego lub śmigłowego w celu podwyższenia ciśnienia na
wlocie do wirnika
- wcześniejsze ujęcie cieczy w kanały wlotowe,
- wstępny kręt zgodny z kierunkiem obrotów wirnika 1
(…)
… prędkości na wirniku. W tym celu stosuje się
wirnik o powiększonym przekroju wlotowym.
- zastosowanie wirnika wstępnego typu śrubowego lub śmigłowego w celu podwyższenia ciśnienia na
wlocie do wirnika
- wcześniejsze ujęcie cieczy w kanały wlotowe,
- wstępny kręt zgodny z kierunkiem obrotów wirnika 1<90
- zastosowanie materiałów odpornych na niszczące działanie kawitacji : brązy, stale i staliwa stopowe, szkło
porcelana – najmniej odporne jest żeliwo
- zapewnienie gładkich powierzchni
- utwardzona powierzchnia przez nawęglanie lub azotowanie
SPOSOBY EKSPLOATACYJNE :
- ustawienie pomp z zapewnieniem małej wysokości ssania
- eksploatowanie w pobliżu Qn
- zabezpieczenie przed wzrostem temperatury cieczy
- zabezpieczenie przed niespodziewanym wzrostem prędkości obrotowej pompy
dodawanie pewnej ilości…
... zobacz całą notatkę
Komentarze użytkowników (0)