
Fragment notatki:
1.
Podstawowe pojęcia mechaniki płynów
W większości zastosowań technicznych wyróżnia się dwa rodzaje ciał, tzn. płyny i
ciała stałe, przy czym najczęściej spotykana definicja pozwalająca rozróżnić te dwa ośrodki
brzmi następująco:
„...płyny w odróżnieniu od ciał stałych poddają się działaniu dowolnie nawet małych sił
wywołujących zmiany kształtu”. Mimo, iż definicja ta jest całkowicie precyzyjna i łatwa do
zrozumienia, to jednak po głębszym zastanowieniu nasuwać może szereg wątpliwości.
1.1.
Mechanika ciała stałego a mechanika płynów.
Pierwsza wątpliwość dotyczyć może sprzeczności między intuicyjnie wyczuwaną
strukturą płynu i pojęciem kształtu, bo przecież niektóre podręczniki definiują płyny jako
ośrodki bezpostaciowe, które albo przyjmują kształt naczynia (ciecze) lub wypełniają całe
naczynie (gazy).
Kolejna wątpliwość dotyczyć może celowości wprowadzania rozróżnienia między
ciałami stałymi i płynami. Miedź, która jest typowym przedstawicielem ciał stałych, po
podgrzaniu do temperatury powyżej 1350o K staje się cieczą i można spodziewać się, że w
odpowiednio wysokiej temperaturze zamieni się w parę, czyli przejdzie w stan gazowy. Inne
zaś ciała traktowane jako płyny jak np. asfalt czy lepik uderzane młotkiem będą pękać jak
ciało stałe. Jeżeli jednak odwrócimy do góry dnem beczkę z lepikiem, to po upływie
odpowiednio długiego czasu wypłynie on z beczki (chociaż w temperaturze otoczenia może
to trwać nawet kilka tygodni).
Spróbujmy zatem przedstawić bardziej wnikliwą analizę właściwości fizycznych
obydwu tych substancji. Z punktu widzenia inżyniera najistotniejszą własnością każdego
materiału konstrukcyjnego jest jego zdolność do przenoszenia obciążeń, w których to
warunkach deformacja konstrukcji nie może przekroczyć założonych przez projektanta
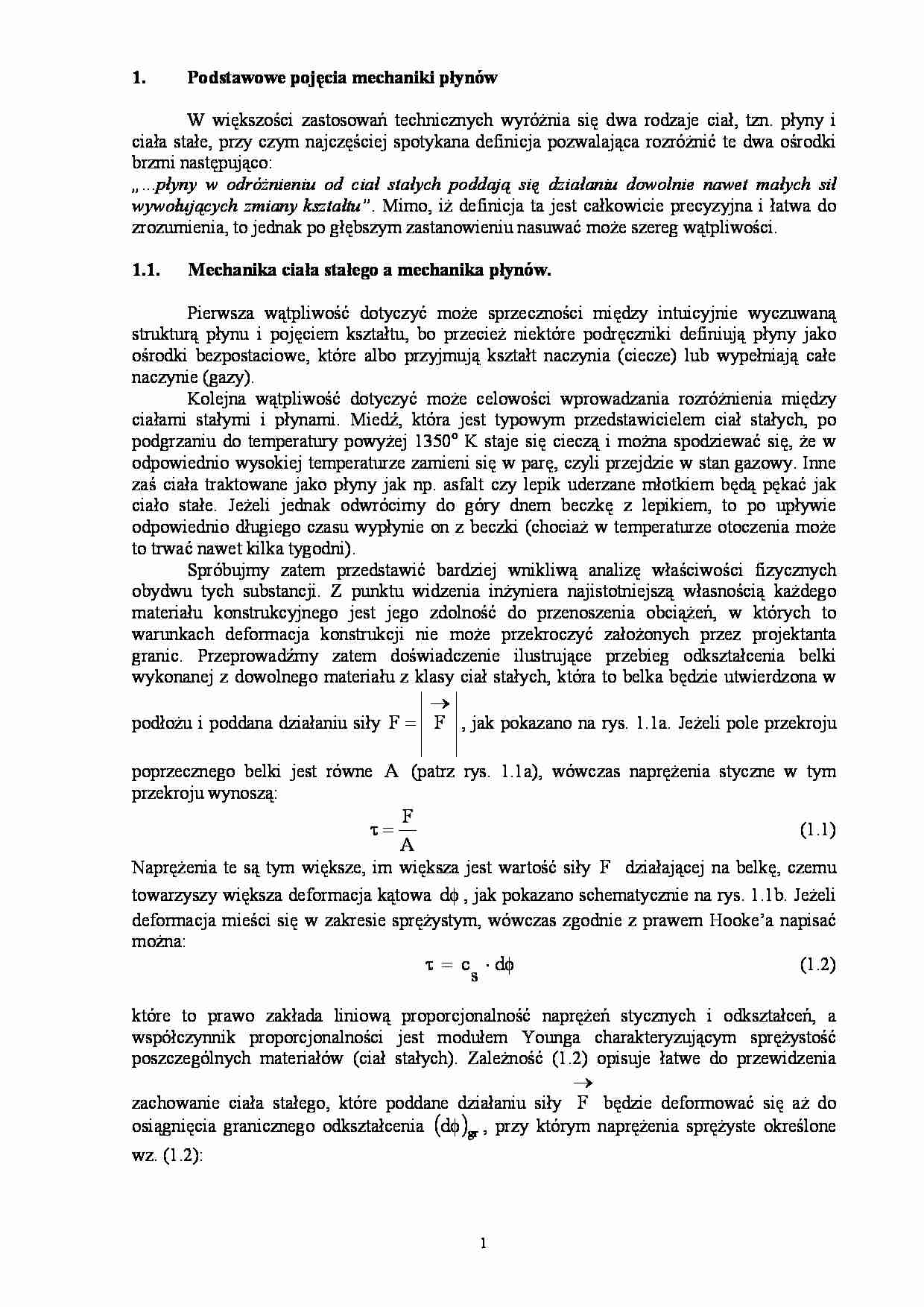
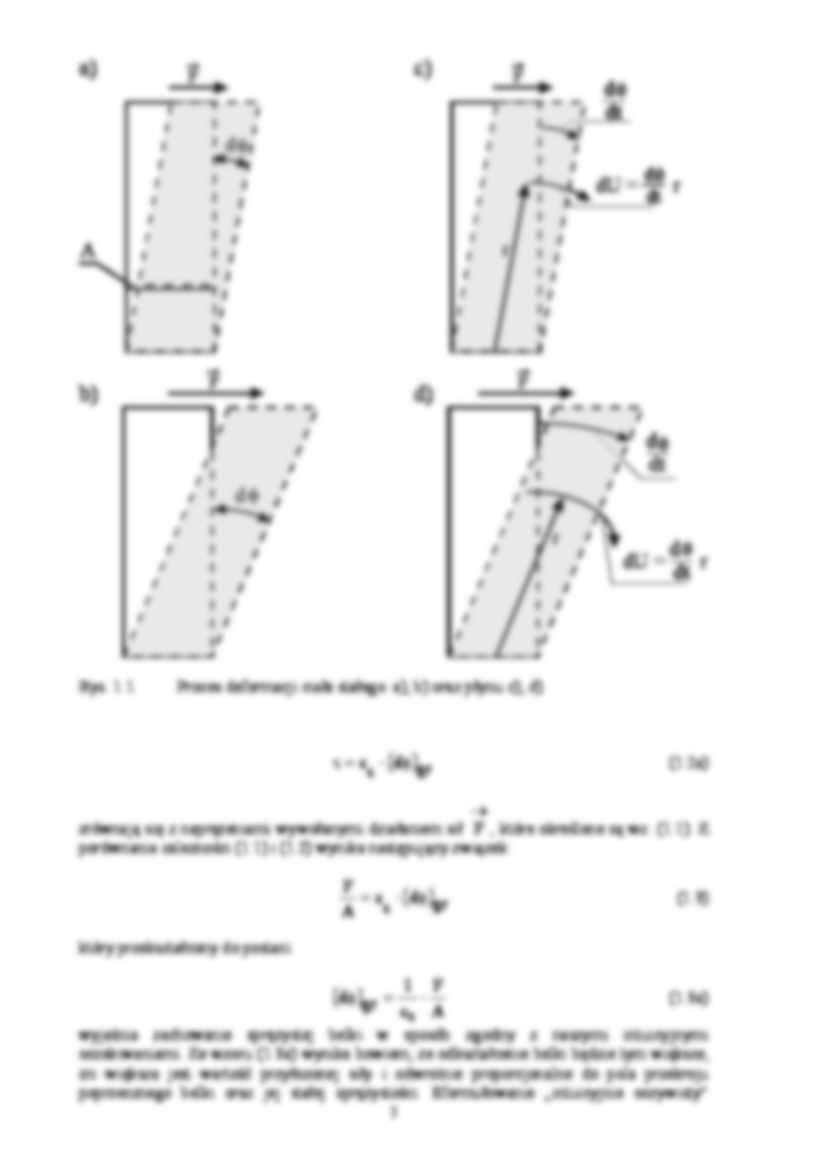
granic. Przeprowadźmy zatem doświadczenie ilustrujące przebieg odkształcenia belki
wykonanej z dowolnego materiału z klasy ciał stałych, która to belka będzie utwierdzona w
→
podłożu i poddana działaniu siły F = F , jak pokazano na rys. 1.1a. Jeżeli pole przekroju
poprzecznego belki jest równe A (patrz rys. 1.1a), wówczas naprężenia styczne w tym
przekroju wynoszą:
τ=
F
A
(1.1)
Naprężenia te są tym większe, im większa jest wartość siły F działającej na belkę, czemu
towarzyszy większa deformacja kątowa dφ , jak pokazano schematycznie na rys. 1.1b. Jeżeli
deformacja mieści się w zakresie sprężystym, wówczas zgodnie z prawem Hooke’a napisać
można:
τ = c ⋅ dφ
(1.2)
s
które to prawo zakłada liniową proporcjonalność naprężeń stycznych i odkształceń, a
współczynnik proporcjonalności jest modułem Younga charakteryzującym sprężystość
poszczególnych materiałów (ciał stałych). Zależność (1.2) opisuje łatwe do przewidzenia
→
zachowanie ciała stałego, które poddane działaniu siły F będzie deformować się aż do
osiągnięcia granicznego odkształcenia (dφ)gr , przy którym naprężenia sprężyste określone
wz. (1.2):
1
a)
c)
F
F
φ
φ
dU =
r
r
A
b)
φ
F
d)
F
φ
φ
r
dU =
Rys. 1.1.
φ
r
Proces deformacji ciała stałego a), b) oraz płynu c), d).
τ = c ⋅ (dφ)gr
s
(1.2a)
→
zrównają się z naprężeniami wywołanymi działaniem sił F , które określone są wz. (1.1). Z
porównania zależności (1.1) i (1.2) wynika następujący związek:
F
= c ⋅ (dφ)gr
s
A
(1.3)
1 F
⋅
cs A
(1.3a)
który przekształcony do postaci:
(dφ)gr =
wyjaśnia zachowanie sprężystej belki w sposób zgodny z naszymi intuicyjnymi
oczekiwaniami. Ze wzoru (1.3a) wynika bowiem, że odkształcenie belki będzie tym większe,
im większa jest wartość przyłożonej siły i odwrotnie proporcjonalne do pola przekroju
poprzecznego belki oraz jej stałej sprężystości. Sformułowanie „intuicyjnie oczywisty”
2
wyraża tutaj zrozumiałą dla wszystkich regułę, iż belka o zadanym kształcie będzie mogła
→
przenieść żądaną siłę F nie ulegając przy tym odkształceniu większemu niż założone pod
warunkiem, że jej przekrój poprzeczny będzie odpowiednio duży oraz materiał odpowiednio
„mocny”.
Podobne doświadczenie z belką wykonaną z płynu choć bardzo proste w zamyśle, jest
niestety niemożliwe do wykonania w praktyce. Poprzestańmy zatem na doświadczeniu
myślowym (zabieg, który będziemy często powtarzać) wydzielając z przestrzeni wypełnionej
płynem identyczną jak poprzednio belkę o przekroju poprzecznym A . Wydzielenie to można
rozumieć jako rozciągnięcie w płynie nieważkiej, idealnie podatnej folii, która utworzy
płynną belkę w sposób pokazany na rys. 1.1c oraz d. W tym przypadku przyłożenie siły
(nawet bardzo małej) spowoduje, że „płynna” belka będzie odkształcać się w sposób ciągły,
nie osiągając żadnej wartości granicznej odkształcenia. Przyłożenie większej siły spowoduje
natomiast, że belka będzie odkształcać się z większą prędkością, co pokazano schematycznie
na rys. 1.1d. Uogólnieniem tej obserwacji jest następujący związek:
dφ
τ=c ⋅
p dt
w którym dU =
(1.4)
dφ
jest prędkością odkształcenia, a współczynnik proporcjonalności
dt
decydujący o oporze, z jakim płyn przeciwstawia się ruchowi, nazwany został przez Newtona
lepkością
c =µ.
p
Po uwzględnieniu we wz. (1.4) powyższej zależności otrzymujemy prawo Newtona:
τ=µ
dφ
dt
(1.5)
wyrażające podstawową własność płynu jaka jest proporcjonalność naprężeń stycznych do
prędkości odkształcenia. Praktyczną ilustracją tego prawa będzie próba przemieszczania dłoni
zanurzonej w cieczy, kiedy to bardzo powolny ruch powoduje minimalny opór, podczas gdy
próba przyspieszenia ruchu wywoła gwałtownie narastającą reakcję płynnego ośrodka.
Podsumowaniem powyższych obserwacji może być następująca definicja:
„...płyn jest ośrodkiem, który próbom zmiany jego postaci stawia opór proporcjonalny do
prędkości deformacji”.
Oznacza to, że do zmiany postaci płynu wystarczy dowolnie mała siła, jeżeli tylko deformacja
będzie przeprowadzona bardzo powoli a jeśli do danego fragmentu płynu zostanie przyłożona
duża siła, wówczas przy znacznych prędkościach deformacji płyn przejawiać będzie bardzo
duży opór. Omówione powyżej doświadczenie „myślowe” sprawiać może wrażenie zabiegu
sztucznego, chociaż w rzeczywistości takim właśnie deformacjom może w rzeczywistości
podlegać płyn. Dla przykładu, przeanalizujmy zachowanie elementu płynu w przepływie
pokazanym na rys. 1.2a, w którym występuje gradient prędkości spowodowany np.
obecnością ściany (rys. 1.2a). Pokazany tu element płynu o długości krawędzi dy , poddany
jest odkształceniu postaciowemu, wywołanemu różnicą prędkości dU na górnej i dolnej
ścianie (patrz rys. 1.2b). Liniowe przemieszczenie górnej ściany narasta w sposób ciągły w
czasie, spełniając przy tym następujący związek:
tg(dφ) =
dU ⋅ dt
dy
(1.6)
Ponieważ element płynu ma rozmiary nieskończenie małe, stąd zależność ta może być
zapisana jako:
dφ =
dUdt
dy
co pozwala powiązać prędkość deformacji kątowej i gradient prędkości:
3
(1.6a)
dφ dU
=
dt dy
a)
(1.6b)
b)
y
U+dU
dU dt
dy
dy
U
dU
Rys. 1.2.
U(y)
Proces deformacji elementarnej objętości płynu w przepływie w obecności
gradientu prędkości.
Podstawienie powyższej zależności do wz. (1.5) pozwala z kolei wyrazić prawo Newtona w
najczęściej wykorzystywanej postaci:
τ=µ
dφ
dU
=µ
dt
dy
(1.7)
gdyż w mechanice płynów analizie poddajemy nie prędkość deformacji lecz pole prędkości
(np. U ( y) - rys. 1.2a), które uzyskujemy jako rozwiązanie równań ruchu. Możemy zatem
uogólnić podaną powyżej definicję płynu, która zgodnie z zal. (1.7) może być wyrażona
następująco:
„...płyn jest ośrodkiem, w którym naprężenia styczne są proporcjonalne do prędkości
deformacji”*.
powierzchnia
swobodna
ciecz
Rys. 1.3.
gaz
Zachowanie cieczy a) oraz gazu b) w stanie równowagi statycznej.
Płynami są zarówno ciecze jak i gazy, które jednak różnią się dwoma istotnymi
cechami. Ciecze przyjmują zawsze kształt naczynia, w którym się znajdują i na granicy z
otaczającym je innym płynem tworzą powierzchnię rozdziału nazywaną często swobodną
*
- gradient dU/dy jest w przepływie dwuwymiarowym pokazanym na rys. 2a jedyną niezerową składową
tensora prędkości deformacji –patrz rozdz.3.
4
powierzchnią (rys. 1.3a). Gaz jest natomiast płynem, który rozprzestrzenia się w całej
przestrzeni nie tworząc jakichkolwiek powierzchni rozdziału (patrz rys. 1.3b).
Druga istotna różnica pomiędzy cieczami i gazami to ich ściśliwość rozumiana jako
opór stawiany próbom zmiany objętości. Ciecze są praktycznie nieściśliwe, gdyż
przykładowo zmiana objętości wody o zaledwie 5% zachodzi dopiero przy ciśnieniu
przekraczającym 1000 bar. Gazy natomiast bardzo łatwo dają się sprężać do bardzo małych
objętości i z równą łatwością rozprężają się zajmując zawsze całą dostępną przestrzeń.
Trzecim powodem konieczności utrzymywania podziału na ciecze i gazy jest bardzo
duża różnica ich gęstości, niespotykana w ciałach stałych. Przykładowo, różnica gęstości
między powietrzem (ρ ≈ 1.2 [kg/m3] i wodą (ρ = 1000 [kg/m3] sięga aż trzech rzędów
wielkości a jeżeli porównamy najlżejszy z gazów (wodór o gęstości ρ = 0.08999 [kg/m3]) i
najcięższą ze znanych cieczy (rtęć dla której ρ = 1.355 x 104 [kg/m3]) to stosunek ten
przekroczy wówczas 1.6 · 105. Zainteresowany Czytelnik może łatwo sprawdzić, że stosunek
gęstości najlżejszych i najcięższych ciał stałych niewiele przekracza rząd wielkości.
Podsumowując przedstawione powyżej informacje stwierdzić można, że właściwości fizyczne
płynów i ciał stałych różnią się bardzo istotnie.
1.2.
Struktura molekularna płynów.
Próbując wyjaśnić różnice własności ciał stałych i płynów przypomnijmy podstawowe
wiadomości o budowie materii w ujęciu, które nazywane jest atomistycznym. W największym
skrócie treść tej teorii ująć można następująco:
„...materia składa się z atomów, poruszających się bezustannie, przyciągających się gdy są
od siebie nieco oddalone, odpychających się zaś, gdy je zbytnio ścieśnić” (R.Feynman).
Sprawdźmy, czy odmienne reakcje na obciążenie wykazywane przez ciała stałe i płyny mogą
być wyjaśnione przez różnice w ich budowie atomowej. Zgodnie z założeniami teorii
atomistycznej ciała stałe składają się z atomów tkwiących w węzłach pewnej przestrzennej
struktury zwanej siecią krystaliczną (rys. 1.4).
Ciało stałe :
energia
kinetyczna
Rys. 1.4.
=
ciepło
Sieć krystaliczna ciała stałego.
Węzły te rozmieszczone są w sposób ściśle uporządkowany co nie oznacza jednak, że każdy
atom ma swoje określone położenie. Atomy nie pozostają bowiem w spoczynku a węzeł sieci
przedstawia jedynie pewne średnie położenie, wokół którego atomy wykonują ruch drgający.
Tylko w ten sposób teoria atomistyczna może wyjaśnić np. zdolność ciał stałych do
akumulacji ciepła, które przekształcone jest w energię kinetyczną drgających atomów, co
również pokazano schematycznie na rys. 1.4. Odkształcenie ciała stałego jest równoważne
deformacji sieci krystalicznej, pokazanej na rys. 1.5, której towarzyszyć musi zmiana
odległości między atomami wywołująca z kolei „opór” sił międzyatomowych. Przyłożenie
→
siły F pokazanej na rys. 1.1a,b wywoła zatem taką deformację sieci krystalicznej, przy
5
której siły „oporu” materii zrównoważą obciążenia zewnętrzne i w ten sposób ustala się
położenie równowagi między obciążeniem i deformacją, które jest charakterystyczne dla
zachowania ciał stałych.
Znajomość budowy molekularnej płynu zawdzięczamy Robertowi Brownowi który
zauważył, że cząstki pyłku kwiatowego zawieszone w wodzie wykonują bezładne,
zygzakowate ruchy, które nie mogły być wyjaśnione istnieniem prądów konwekcyjnych
F
deformacja struktury
(opór materiału)
utrzymująca się w
obecności siły
Rys. 1.5.
Deformacja struktury krystalicznej ciała stałego
cieczy. Początkowo sądzono, że ruch cząstek zawiesiny jest wynikiem uderzeń molekuł
cieczy, lecz wkrótce okazało się, że rozmiary atomów są na tyle małe, że niemożliwe jest aby
cząstka zawiesiny mogła przemieścić się w wyniku uderzenia przez pojedynczą molekułę.
Dziś wiadomo, że ruchy Browna są efektem statystycznym, w którym każde przemieszczenie
jest rezultatem wypadkowym wielkiej liczby jednoczesnych uderzeń molekuł cieczy w
cząstkę zawiesiny. Jeżeli w jakimś momencie uderzenia z jednego kierunku będą bardziej
intensywne, wówczas cząstka zawiesiny podąży w tym właśnie kierunku. Istnienie ruchów
Browna wykazuje zatem, że płyn uważany być może za zbiorowisko bezładnie poruszających
się cząstek (atomów lub molekuł) co pokazano na rys. 1.6. Molekuły płynu zderzają się ze
sobą, przekazując sobie wzajemnie energię a jednym z ważniejszych parametrów
charakteryzujących molekularną budowę płynu jest średnia droga, którą przebywa cząstka
płynu między kolejnymi zderzeniami, nazywana średnią odległością międzycząsteczkową i
oznaczona symbolem λ (patrz rys. 1.6).
Płyn :
λ
Rys. 1.6.
Struktura cząsteczkowa płynu.
Ściana zanurzona w płynie jest z obu stron poddana jednoczesnemu bombardowaniu molekuł,
których prędkości są identyczne po lewej i prawej stronie ściany (rys. 1.7) i dlatego też na
nieruchomej ścianie nie występuje jakiekolwiek oddziaływanie płynu. Jeżeli natomiast ściana
zacznie się poruszać, wówczas po prawej stronie ściany wypadkowa prędkości molekuł
będzie sumą, po lewej zaś różnicę prędkości ruchu molekuł i ściany. W rezultacie różnica
pędów molekuł uderzających z obydwu stron w ruchomą ścianę powoduje powstanie siły
oporu, która istnieć będzie tak długo, jak długo trwać będzie ruch zanurzonej w płynie ściany.
6
Model atomistyczny tłumaczy zatem, dlaczego w płynie naprężenia styczne proporcjonalne są
do prędkości deformacji i dlatego płyn, w odróżnieniu od ciała stałego nie może utrzymać
przez czas skończony naprężeń stycznych.
Teoria atomistyczna pozwala wyjaśnić zauważone w rozdziale poprzednim różnice w
zachowaniu ciał stałych i płynów, jak również odmienne właściwości fizyczne cieczy i
gazów. Przykładowo, para wodna charakteryzuje się średnią drogą swobodną rzędu λ = 4 x
10-8 [m], co oznacza różnicę dwóch rzędów wielkości w „upakowaniu” molekuł pary i wody,
czego skutkiem jest istotna różnica gęstości fazy ciekłej i gazowej tej samej substancji.
Znajomość struktury molekularnej tłumaczy również dlaczego podgrzanie cieczy
powoduje iż poruszające się w niej ciało doznaje mniejszego oporu, podczas gdy w gazach
opór ruchu rośnie wraz z temperaturą ośrodka. Opór wywołany tarciem płynu o ściany jest
bowiem proporcjonalny do współczynnika lepkości dynamicznej µ , który wraz ze wzrostem
temperatury wzrasta w cieczach i maleje w gazach, jak pokazano w tabl. 1.1 na przykładzie
wody i powietrza (dane dla ciśnienia pa = 105). Odmienność zachowania współczynnika
lepkości µ może zostać wytłumaczona przez molekularne właściwości tych płynów, gdyż
teoria kinetyczno-molekularna prowadzi do wniosku, że lepkość płynu jest proporcjonalna do
długości drogi swobodnej:
µ ≈ l
Wzrost temperatury cieczy, zwiększający prędkość ruchu molekuł przy niezmiennym ich
„upakowaniu” (stała gęstość) zmniejszać musi średnią odległość między zderzeniami, co z
kolei zmniejsza współczynnik lepkości. Przyrost temperatury gazu pozostającego pod stałym
ciśnieniem zmniejsza upakowanie molekuł (spadek gęstości gazu pod wpływem temperatury,
co z kolei zwiększa długość drogi swobodnej i powoduje wzrost wartości współczynnika
lepkości dynamicznej gazu.
ściana nieruchoma
prędkość
wypadkowa
opór (naprężenia
styczne) istnieją tak
długo jak długo
trwa ruch
opór
ściana ruchoma
Rys. 1.7.
Opór ruchu wywołany strukturą cząsteczkową płynu.
7
Tablica 1.1. Zmienność lepkości wody i powietrza w funkcji temperatury
Woda
Powietrze
o
µ
µ
Temp. C
ν
ν
5
2
6
5
2
m /s • 10
Pa • s •10
m /s • 106
Pa • s •10
0
179,2
1,792
1,724
13,33
10
130,7
1,307
1,773
14,21
20
100,2
1,004
1,882
15,12
30
79,7
0,801
1,869
16,04
40
65,3
0,658
1,915
16,98
60
48.3
0.482
2.03
18.8
80
36.4
0.368
2.13
20.9
100
28.9
0.296
2.22
23.1
W mechanice płynów posługujemy się także pojęciem lepkości kinematycznej ν
definiowanej jako iloraz lepkości dynamicznej i gęstości:
ν=
µ
ρ
m2
s
(1.8)
Jeżeli w cieczach wzrost temperatury powoduje przyrost prędkości ruchu molekuł bez zmiany
ich wzajemnych odległości, w rezultacie spadek lepkości dynamicznej cieczy przy
niezmiennej gęstości (określonej „upakowaniem” molekuł) powoduje identyczne
zmniejszenie lepkości kinematycznej, co pokazano na rys.1.8a. Molekuły gazu odległe są od
siebie na tyle daleko, że siły wzajemnego przyciągania nie mogą już działać i dlatego przyrost
temperatury powoduje nie tylko wzrost prędkości ich ruchu lecz zwiększa także ich wzajemne
odległości, czego wynikiem jest spadek gęstości gazu prowadzący do szybszego wzrostu
współczynnika lepkości kinematycznej (patrz rys. 1.8b).
a)
b)
ν
µ
ν
µ
µ
µ
ν
θ
Rys. 1.8.
ν
θ
Zmienność lepkości kinematycznej cieczy a) i gazu b)
Molekularna struktura płynu charakteryzuje się bardzo małymi rozmiarami, gdyż
odległość między środkami atomów wodoru i tlenu w cząsteczce wody przedstawionej
schematycznie na rys. 1.6 wynosi zaledwie 0.957 · 10-10 [m], podczas gdy średnia odległość
między cząsteczkami wody w temperaturze 4o C wynosi zaledwie 3 · 10-10 [m]. Oznacza to, że
w 1 cm3 wody zawartych jest około 3.3 · 1023 molekuł a poglądową ilustracją
mikroskopijnych rozmiarów skal cząsteczkowych jest obrazowe stwierdzenie Feynmanna, iż
„...powiększenie kropli do rozmiarów kuli ziemskiej sprawiłoby, że cząsteczka miałaby
średnicę zbliżoną do kropli”.
8
1.3.
Płyn jako ośrodek ciągły
Model atomistyczny wyjaśnia co prawda podstawowe własności płynów lecz jego
stosowanie wymaga bardzo złożonych metod opisu ruchu poszczególnych molekuł, przy
czym stopień trudności zagadnienia jest tym większy, im więcej cząstek objąć musimy
analizą. Opis struktury molekularnej operuje jednak bardzo małymi wymiarami, o czym
mówiliśmy już w rozdz. 1.2 podając przykładowe wymiary molekuł i dróg swobodnych. W
zastosowaniach technicznych operujemy znacznie większymi skalami liczonymi w metrach
(długość kadłuba statku , rozpiętość skrzydeł samolotu), centymetrach (średnice wirników
pomp) lub milimetrach (szerokość szczeliny łożyska ślizgowego). Najmniejszy wymiar
liniowy, który może mieć znaczenie w mechanice płynów jest rzędu dziesiętnych lub co
najwyżej setnych części milimetra i odpowiada wysokości chropowatości powierzchni, która
wywoływać może zmiany oporów tarcia płynu o ścianę. Wobec tak znacznej różnicy skal
między strukturą molekularną płynu i geometrycznymi wymiarami przepływu oczywistym
staje się pytanie, czy w mechanice płynów musimy stosować metody opisu oparte o model
atomistyczny materii. Kryterium pozwalającym rozstrzygnąć tę kwestię jest liczba Knudsena
Kn , definiowana jako iloraz charakterystycznej skali molekularnej ośrodka λ oraz skali
geometrycznej L analizowanego zjawiska:
λ
(1.9)
Kn =
L
Jeżeli przyjmiemy, że rozpatrywanym ośrodkiem będzie powietrze, wówczas dla tzw.
warunków normalnych:
p = 105 [ Pa ] ;
T
= 273 [ K ]
średnia długość drogi swobodnej będąca charakterystyczną skalą struktury molekularnej
ośrodka wynosić będzie:
λ = 9.2 x 10-8 m
Jeżeli przyjmiemy, że najmniejszy wymiar liniowy istotny dla opisu zachowania płynu będzie
rzędu setnych części milimetra tzn.:
L = 10 − 5 [m]
wówczas liczba Knudsena wynosić będzie:
λ
≅ 10− 2
L
Jak podaje W. Prosnak, dla liczb Knudsena spełniających warunek:
Kn 1
λ
L
Rys. 1.9.
Element płynu jako graniczna objętość ośrodka ciągłego
Dalsze analizy prowadzić więc będziemy dla objętości spełniających warunki ciągłości i
objętość taką nazywa się elementem płynu dla którego definicja sformułowana być może
następująco:
„...elementem płynu jest wyodrębniona część masy płynu o wymiarach nieskończenie małych
w porównaniu z wymiarami całej masy płynu poruszającej się lub pozostającej w spoczynku a
jednocześnie dużych w porównaniu z wymiarami struktury molekularnej płynu”.
Tak rozumiany płyn określany jest powszechnie mianem „continuum” a stosowany w dalszej
części tekstu sposób analizy typowy jest dla ośrodków ciągłych i w większości zastosowań
technicznych ten sposób opisu własności płynu jest wystarczająco dokładny. Jedynie w
szczególnych przypadkach (np. w górnych warstwach stratosfery) np. gdy ciśnienie gazu jest
bardzo niskie, wówczas odległości między molekułami stają się tak duże, że założenie o
ciągłości ośrodka przestaje być spełnione. W takich przypadkach konieczne jest stosowanie
innych metod opisu własności płynu, które charakterystyczne są dla mechaniki gazów
rozrzedzonych lecz ta dziedzina wykracza poza przyjęty zakres tematyczny niniejszego
wykładu.
1.4.
Siły działające na element płynu
Podstawową metodą opisu równowagi układu materialnego stosowaną w mechanice
ogólnej jest następujące stwierdzenie wynikające z praw Newtona:
„...układ materialny jest w stanie równowagi pod działaniem sił zewnętrznych, jeżeli siły
działające na każdą dowolnie ograniczoną jego część tworzą układ wektorów równoważny
zeru”.
Prawa Newtona sformułowano dla układów materialnych rozumianych jako układ ciał
sztywnych oraz układów znajdujących się pod wpływem sił zewnętrznych, tzn. takich, które
10
działają między poszczególnymi masami układu oraz masami nie należącymi do tego układu.
Tymczasem masy należące do układu oddziaływują również między sobą, przy czym są to
zawsze dwie równe siły o tej samej linii działania i przeciwnych zwrotach i taki rodzaj sił
nazywany jest siłami wewnętrznymi. W mechanice płynów siły masowe między masami
układu są oczywiście pomijalnie małe, ale podczas ruchu względnego sąsiednie elementy
płynu odkształcają się i przemieszczają i wówczas lepkość powoduje powstanie tarcia
wewnętrznego i jako skutek powstają naprężenia normalne (wywołane odkształceniem) i
styczne (wywołane przesunięciem) i ten rodzaj sił zakwalifikować musimy do sił
wewnętrznych. Pojawić się musi zatem oczywiste pytanie, czy sposób opisu stanu równowagi
stosowany w mechanice ogólnej może być zastosowany w mechanice płynów i w tym celu
potrzebne jest przyjęcie dwóch dodatkowych założeń.
Po pierwsze, twierdzenie o równowadze może być rozszerzone także i na przypadek
równowagi płynu, jeżeli wprowadzimy tzw. zasadę zesztywnienia która głosi, że równowaga
dowolnego obszaru płynu nie ulegnie zakłóceniu, jeżeli jego fragment zostanie zesztywniony
w taki sposób, aby własności fizyczne zesztywnionego fragmentu nie uległy zmianie.
Zesztywnieniem nie jest zatem przemiana wody w lód, gdyż gęstości tych dwóch ośrodków
są różne, jeżeli jednak potrafimy sobie „wyobrazić” stworzenie takiego lodu, który będzie
miał gęstość identyczną jak woda, wówczas ten zesztywniony fragment płynu będzie
pozostawał w równowadze zanurzony w dowolnym miejscu w płynie. Zasada zesztywnienia
jest intuicyjnie oczywista w przypadku, gdy płyn pozostaje w spoczynku natomiast
stosowanie tej zasady dla opisu stanu równowagi poruszającego się płynu nie jest dobrym
rozwiązaniem a zagadnienie to zostanie omówione w rozdziale dotyczącym metod analizy
ruchu płynu.
a)
b)
Rys.1.10. Metoda przekrojów zastosowana do wyznaczania sił wewnętrznych
Drugie założenie potrzebne do zastosowania zasad dynamiki Newtona do opisu stanu
równowagi płynu dotyczy sił wewnętrznych w płynie, które włączyć możemy do bilansu sił
zewnętrznych stosując tzw. metodę przekrojów zilustrowaną na rys. 1.10. Przedstawia on
ciało poddane działaniu sił zewnętrznych (zaznaczonych na rys. 1.10a dwiema strzałkami), w
którym zaznaczono również przekrój dzielący ciało na dwie części. Jeżeli jedną z nich
wyodrębnimy myślowo, wówczas siły wewnętrzne, którymi część prawa oddziaływała na
część lewą staną się siłami zewnętrznymi dla części lewej, co pokazano na rys. 1.10b. Jeżeli
siłę wypadkową wynikającą z warunku równowagi podzielimy przez pole przekroju
otrzymamy średnią wartość naprężenia, które podobnie jak siła będzie wektorem.
11
W analizie stanu równowagi płynu prowadzonej dla wydzielonego metodą przekrojów
elementu płynu występować będą zatem tylko siły zewnętrzne, wśród których wyróżnić
można dwie odrębne klasy sił o różnych własnościach.
1.4.1. Siły masowe
Siły masowe stanowią pierwszą grupę sił zewnętrznych będących wynikiem działania
mas nie należących do wydzielonego układu materialnego na masę elementu płynu. Siły
masowe działają na odległość, oddziaływują na każdy element płynu i są proporcjonalne do
masy elementu płynu ∆m wydzielonej z całej masy m jak pokazano na rys. 1.11.
∆m
∆V
A
m
V
∆ F'
Rys.1.11. Elementarna siła masowa
→
Wektor sił masowych ∆ F ' działa na masę płynu ∆m zawartą w objętości ∆V i
ze względu na elementarne wymiary objętości zarówno masa jak i siła masowa może być
przyporządkowane środkowi ciężkości A wydzielonego obszaru. W mechanice płynów
→
posługujemy się pojęciem jednostkowej siły masowej F , która jest granicą ilorazu
→
F =
→
∆ F'
lim
∆m →0 ∆m
(1.11)
a przy założeniu nieściśliwości płynu ( ρ = idem) jednostkową siłę masową wyrazić można:
→
→
→ 1
∆ F ' 1 d F'
=
F = lim
∆V ρ dV
ρ
(1.11a)
→
Wektor F ma charakter współczynnika proporcjonalności, niezależnego od wielkości
obranego elementu płynu i ma wymiar przyspieszenia, co pozwala zapisać wektor siły
→
masowej ∆ F ' następująco:
→
→
∆ F' = ρ ∆V ⋅ F
(1.12)
Jeżeli na element płynu działa tylko przyspieszenie ziemskie, wówczas jednostkowa siła
masowa wynosi:
→
→
F = g
(1.13)
→
a w najczęściej stosowanym kartezjańskim układzie współrzędnych składowe wektora F
zapisuje się następująco:
→
→
→
→
F =X i +Y j +Z k
(1.14)
gdzie X, Y, Z są zwyczajowo stosowanymi oznaczeniami dla kartezjańskich składowych
wektora jednostkowych sił masowych.
12
1.4.2. Siły powierzchniowe
Drugą grupą sił zewnętrznych są siły powierzchniowe, które są bezpośrednio
przyłożone do powierzchni obejmującej wydzieloną część układu materialnego o masie ∆m i
powierzchni ∆S (rys. 1.12).
∆m
m
∆S
r
r
r
n
A
r
∆ p'
S
Rys.1.12. Elementarna siła powierzchniowa
Podobnie jak w przypadku sił masowych wprowadzimy pojęcie jednostkowej siły
→
powierzchniowej p' definiowanej jako granica ilorazu siły powierzchniowej ∆ p'
powierzchni ∆S przy założeniu, że ta ostatnia wielkość dąży do zera:
→
→
→
∆ p ' d p'
p = lim
=
∆S
dS
∆S→0
i
1.15)
która to wielkość przyłożona jest w punkcie A leżącym na powierzchni ∆S ograniczającej
element płynu.
→
Wektor p' jest również współczynnikiem proporcjonalności siły powierzchniowej do
→
powierzchni i ma wymiar naprężenia co oznacza, że wektor siły powierzchniowej ∆ p
zapisany być może jako:
→ →
∆ p' = p ⋅ ∆S
(1.16)
tzn. siła powierzchniowa jest równa iloczynowi wektora jednostkowej siły powierzchniowej i
pola powierzchni elementu płynu.
1.4.3. Siły zewnętrzne – podsumowanie
→
→
Siły masowe F i powierzchniowe p mimo iż określone są wspólną nazwą sił
→
zewnętrznych, wykazują jednak bardzo istotne różnice. Jednostkowa siła masowa F w
danym punkcie A (x, y, z) i w chwili t przyjmować może tylko ściśle określoną wartość
jednoznacznie skierowaną co oznacza, że jest ona jednoznaczną funkcją wektorową
współrzędnych i czasu
→ →
F = F ( x , y, z , t )
(1.17)
→
Jednostkowa siła powierzchniowa p może natomiast w każdym punkcie płynu przybierać
nieskończenie wiele wartości, w zależności od orientacji powierzchni w punkcie, w którym
13
przyłożony jest wektor sił powierzchniowych. Jeżeli położenie punktu A określone jest
→
promieniem (wektorem) r a orientacja powierzchni w danym punkcie określona jest przez
→
wersor n wówczas jednostkowa siła powierzchniowa zapisana być może następująco:
→
→ →
p = f r, n
(1.18)
co oznacza, że wraz ze zmianą położenia punktu i orientacji powierzchni zmienia się zarówno
→
wartość liczbowa jak i kierunek naprężenia p .
1.5.
Ciśnienie w płynie jako wielkość skalarna
Pojęcie ciśnienia definiowanego jako wartość naprężeń powierzchniowych
działających prostopadle do powierzchni można wyjaśnić rozpatrując płyn pozostający w
spoczynku, gdyż brak tarcia sprawia, że siła powierzchniowa musi być skierowana
prostopadle do powierzchni. Dla analizy własności ciśnienia wybierzmy w płynie
znajdującym się w stanie równowagi element płynu o kształcie czworościanu jak pokazano na
rys. 1.13.
dS
dSy
dz
r
p
z
r r
p
px
dSx
y
dy
dx
y
x
dSz
r
pz
Rys.1.13. Siły powierzchniowe działające na czworościenny element płynu
Naprężenia powierzchniowe zostały przeniesione na powierzchnie czworościanu przy
zastosowaniu metody przekrojów a sam czworościan poddany zostanie zesztywnieniu, przy
czym dla ułatwienia analizy boki dx , dy, dz są równoległe do odpowiednich osi przyjętego
kartezjańskiego układu współrzędnych.
→
→
→
Jeżeli p x , p y , p z oznaczają wektory naprężeń działających na ściany boczne
czworościanu dS , dS , dS
x
y
→
z
prostopadłe do osi współrzędnych x , y, z wówczas p
oznaczać będzie naprężenia normalne do powierzchni dS . Na element płynu w stanie
równowagi działać będą siły masowe*
→
→
→
→
F =X i +Y j +Z k
(1.14)
oraz siły powierzchniowe dla których przyjmiemy:
*
należy zwrócić uwagę, że zgodnie z przyjętą konwencją rozpatrujemy tu siły jednostkowe.
14
=
→
px
=
→
py
pz
=
→
pz
p
=
→
p
p
x
py
(1.19)
Powyższe siły spełniać muszą warunki równowagi, które dla poszczególnych osi układu
współrzędnych zapisać można następująco:
∑ wszystkich sił na dany kierunek = 0
Po uwzględnieniu związków (1.14) i (1.19) oraz po zsumowaniu sił pokazanych na rys. 1.13
warunek powyższy zapisać można następująco:
na oś x:
→ →
1
ρ X d S dx + p d S − p d S cos p , i = 0
x
x x
3
-
na oś y:
1
ρ Y d S dy + p d S −
y
y y
3
-
→ →
p d S cos p , j = 0
na oś z:
1
ρ Z d S dz + p d S −
z
z z
3
→ →
p d S cos p , k = 0
Występujące w powyższych warunkach równowagi siły masowe są dla elementu płynu
pomijalnie małe (dx, dy, dz → 0), wobec czego zapisać można:
p dS
x x
p y dSy
p dS
z z
→ →
− p dS cos p , i = 0
→ →
− p dS cos p , j = 0
→ →
- p dS cos p , k = 0
Ponieważ z elementarnych zależności geometrycznych dla czworościanu
wynika:
15
→ →
= d S cos p , i
x
→ →
d Sy = d S cos p , j
→ →
dS
= d S cos p , k
z
dS
więc powyższe warunki równowagi prowadzą do związków:
p − p=0
x
py − p = 0
p
co ostatecznie pozwala zapisać:
z
− p=0
p =p =p = p = 0
x
y
z
(1.20)
Ponieważ nie poczyniliśmy żadnych założeń dotyczących elementu płynu, więc jego objętość
może maleć do zera i wówczas dla każdego punktu płynu słuszna będzie zależność (1.20),
która opisuje prawo Eulera o niezależności ciśnienia od orientacji elementu powierzchni.
Zgodnie z tym prawem w płynie pozostającym w spoczynku w stanie równowagi ciśnienie
jest wielkością skalarną i w każdym punkcie płynu określone być może przez podanie jednej
tylko wartości będącej skalarną funkcją położenia i czasu:
p = p ( x , y, z , t )
(1.21)
Prawo to jest ważne jeżeli w analizowanym ośrodku nie występują siły lepkości tzn. dla płynu
pozostającego w spoczynku lub poruszającego się jako ciało sztywne. Jeżeli w płynie
zachodzą deformacje aktywizujące lepkość wówczas prawo Eulera wymaga pewnej korekty
omówionej w rozdz. 3. Jednostki ciśnienia i problem wyboru poziomu odniesienia przy
obliczaniu wartości ciśnienia omówiony jest w rozdz. 4 dotyczącym równowagi
hydrostatycznej.
16
... zobacz całą notatkę
Komentarze użytkowników (0)