To tylko jedna z 4 stron tej notatki. Zaloguj się aby zobaczyć ten dokument.
Zobacz
całą notatkę
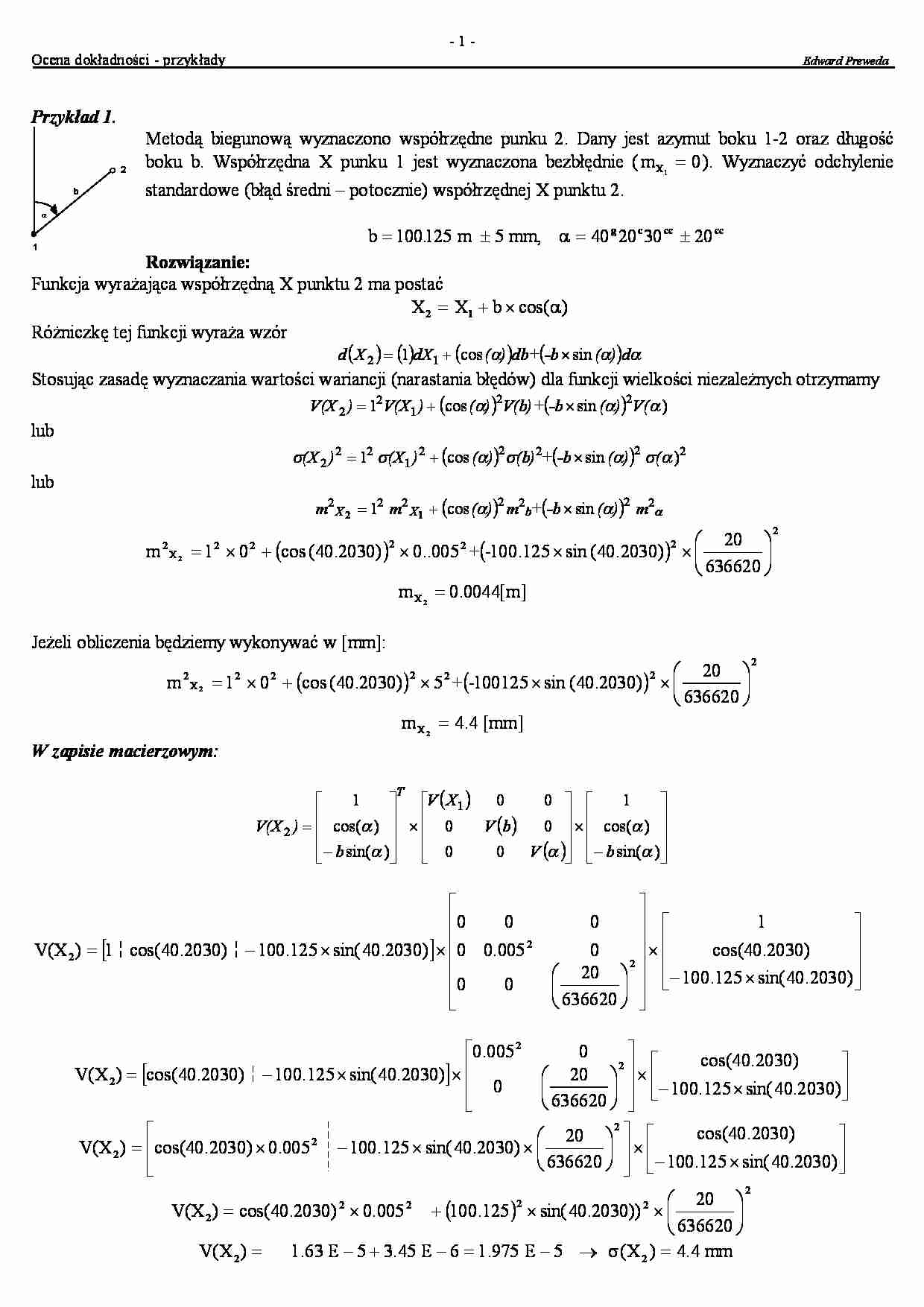


Ocena dokładności - przykłady Edward Preweda - 1 - Przykład 1. Metodą biegunową wyznaczono współrzędne punku 2. Dany jest azymut boku 1-2 oraz długość boku b. Współrzędna X punku 1 jest wyznaczona bezbłędnie ( 0 m 1 X ). Wyznaczyć odchylenie standardowe (błąd średni – potocznie) współrzędnej X punktu 2. cc cc 20 30 20 40 mm, 5 m 125 . 100 b c g Rozwiązanie: Funkcja wyrażająca współrzędną X punktu 2 ma postać ) cos( b X X 1 2 Różniczkę tej funkcji wyraża wzór d ) ( -b db+ ) ( dX X d sin cos 1 1 2 Stosując zasadę wyznaczania wartości wariancji (narastania błędów) dla funkcji wielkości niezależnych otrzymamy ) sin cos 1 2 2 1 2 2 V( ) ( -b V(b)+ ) ( ) V(X ) V(X lub 2 2 2 2 2 1 2 2 2 ) sin cos 1 ( ) ( -b + (b) ) ( ) (X ) (X lub 2 2 2 2 2 2 2 sin cos 1 1 2 m ) ( -b + m ) ( m m b X X 2 2 2 2 2 2 X 2 636620 20 ) 2030 . 40 ( sin 125 . 100 - + 005 .. 0 ) 2030 . 40 ( cos 0 1 m 2 ] m [ 0044 . 0 m 2 X Jeżeli obliczenia będziemy wykonywać w [mm]: 2 2 2 2 2 2 X 2 636620 20 ) 2030 . 40 ( sin 100125 - + 5 ) 2030 . 40 ( cos 0 1 m 2 ] mm [ 4 . 4 m 2 X W zapisie macierzowym: ) sin( ) cos( 1 0 0 0 0 0 0 ) sin( ) cos( 1 1 2 b V b V X V b ) V(X T
(…)
… 2
1
2 7
25
5 40
3 2
1 2
2
3 35 1
3
1
Cov(X ) Cov(X 1 , Y1 , X 2 Y2 , X 3 Y3 )
2 1 25
2 1
1
2
1
3 2 65 2
1 1 2 60
7 2
V() F T Cov(X) F
Wektor pochodnych cząstkowych możemy utworzyć na podstawie równania obserwacyjnego dla kąta
Y
X
Y
X
Y
X
Y
X
2 L dx L 2 L dy L 2 P dx P 2 P dy P 2 L 2 P dx C 2 L…
… 7
5 40 3 2 1 2
2 3 35 1 3 1
Cov(X ) Cov(X 1 , Y1 , X 2 Y2 , X 3 Y3 )
1 2 1 25 2 1
2 1 3 2 65 2
7 2
1 1 2 60
V() F T Cov(X) F
Wektor pochodnych cząstkowych możemy utworzyć na podstawie równania obserwacyjnego dla kąta
Y X Y X Y Y X X
2 L dx L 2 L dy L 2 P dx P 2 P dy P 2 L 2 P dx C 2 L 2 P dy C…
… narastania błędów średnich dla wielkości skorelowanych
Przykład 2. Punkt P jest wyznaczany metodą współrzędnych biegunowych. Na podstawie wyników pomiaru
b 200 m i 50g 20c określić macierz kowariancji dla współrzędnych x i y wyznaczanego punktu, zakładając
b 2 cm , b 40cc oraz, że azymut jest równy kątowi .
Rozwiązanie:
Funkcje wyrażające współrzędne x, y za pomocą b i są następujące
x…
... zobacz całą notatkę
Komentarze użytkowników (0)