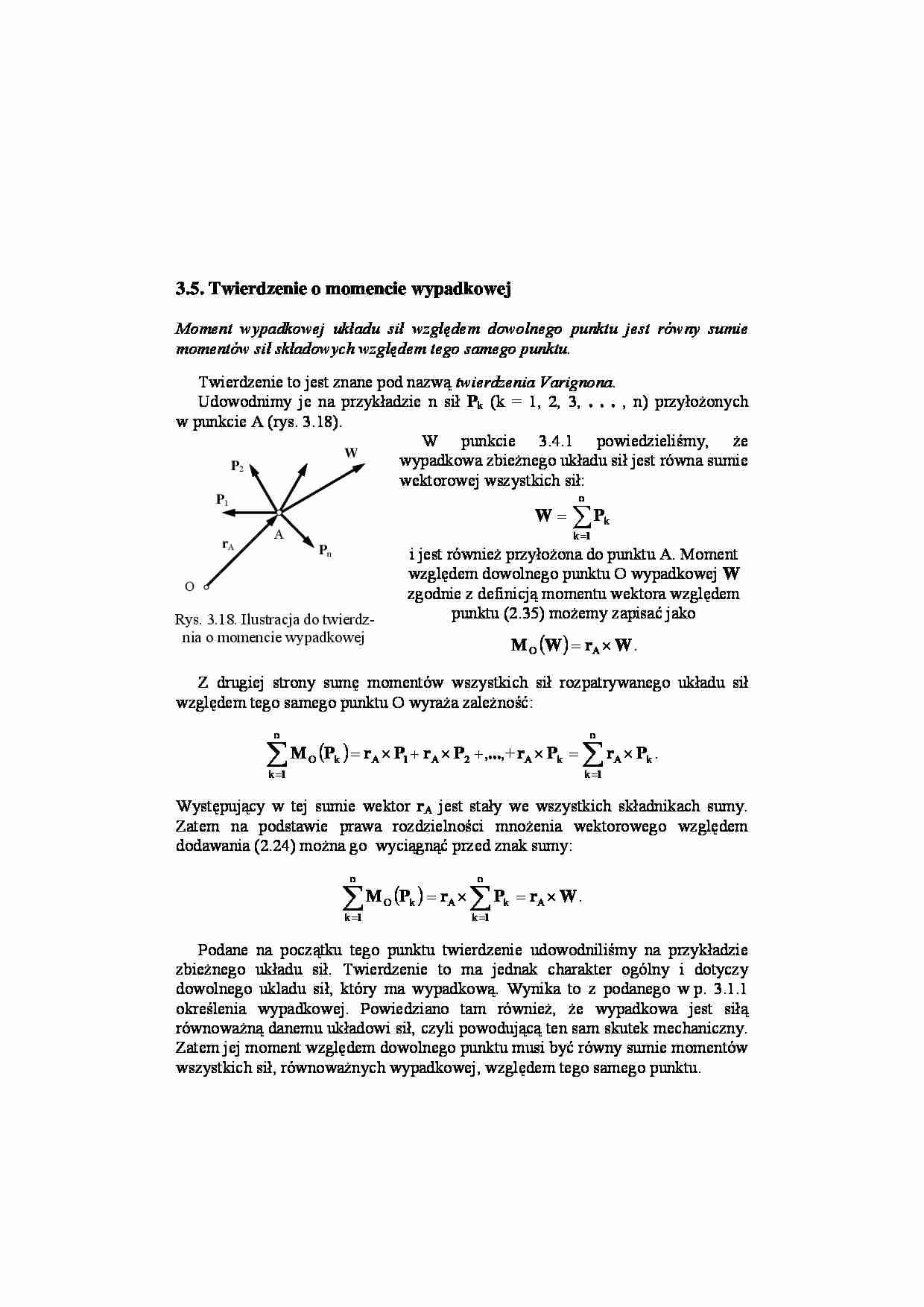
3.5. Twierdzenie o momencie wypadkowej Moment wypadkowej układu sił względem dowolnego punktu jest równy sumie momentów sił składowych względem tego samego punktu. Twierdzenie to jest znane pod nazwą twierdzenia Varignona. Udowodnimy je na przykładzie n sił P k (k = 1, 2, 3, . . . , n) przyłożonych w punkcie A (rys. 3.18). W punkcie 3.4.1 powiedzieliśmy, że wypadkowa zbieżnego układu sił jest równa sumie wektorowej wszystkich sił: r A A P 1 P 2 P n W O Rys. 3.18. Ilustracja do twierdz- nia o momencie wypadkowej W P = = ∑ k k n 1 i jest również przyłożona do punktu A. Moment względem dowolnego punktu O wypadkowej W zgodnie z definicją momentu wektora względem punktu (2.35) możemy zapisać jako ( ) A O r W M . W × = Z drugiej strony sumę momentów wszystkich sił rozpatrywanego układu sił względem tego samego punktu O wyraża zależność: ( ) . ,+ , n 1 k k A k A 2 A 1 A n 1 k k O ∑ ∑ = = × = × + × + × = P r P r ... P r P r P M Występujący w tej sumie wektor r A jest stały we wszystkich składnikach sumy. Zatem na podstawie prawa rozdzielności mnożenia wektorowego względem dodawania (2.24) można go wyciągnąć przed znak sumy: ( ) . A n 1 k k A n 1 k k O W r P r P M × = × = ∑ ∑ = = Podane na początku tego punktu twierdzenie udowodniliśmy na przykładzie zbieżnego układu sił. Twierdzenie to ma jednak charakter ogólny i dotyczy dowolnego ukladu sił, który ma wypadkową. Wynika to z podanego w p. 3.1.1 określenia wypadkowej. Powiedziano tam również, że wypadkowa jest siłą równoważną danemu układowi sił, czyli powodującą ten sam skutek mechaniczny. Zatem jej moment względem dowolnego punktu musi być równy sumie momentów wszystkich sił, równoważnych wypadkowej, względem tego samego punktu.
... zobacz całą notatkę
Komentarze użytkowników (0)