Temat sprawozdania to: modelowanie i badanie podstawowych elementów liniowych automatyki -
symulacja komputerowa. Zajęcia prowadzone są na Politechnice Świętokrzyskiej, prowadzi je prof. dr inż. Stanisław Dziechciarz. Notatka porusza zagadnienia takie jak: własności układów automatyki, własności statyczne, własności dynamiczne, odpowiedź skokowa, podstawowe człony automatyki i ich własności, człon proporcjonalny, człon inercyjny I rzędu, człon całkujący idealny, człon całkujący z inercją (rzeczywisty), człon różniczkujący idealny, człon różniczkujący rzeczywisty, człon oscylacyjny, człon opóźniający. Ponadto notatka zawiera informacje na temat: system SciLab, reguły przekształcania schematów blokowych.
Politechnika Świętokrzyska
Wydział Mechatroniki i Budowy Maszyn
Centrum Laserowych Technologii Metali PŚk i PAN
Zakład Informatyki i RobotykiPrzedmiot:Podstawy Automatyzacji - laboratorium, rok I, sem. II,Specjalność: SUM - Inżynieria Produkcji, studia uzupełniające, 2002÷2003.Ćwiczenie nr 1.Modelowanie i badanie podstawowych elementów liniowych automatyki – symulacja komputerowa1. Własności układów automatyki
Opis cech i własności układów lub elementów automatyki dokonywany jest na
podstawie modelu układu. Model przedstawia w uproszczeniu rzeczywisty układ
fizyczny.
Zazwyczaj
jest
to
model
matematyczny
dla
układów
statycznych,
przedstawiający równaniem algebraicznym, a w układach dynamicznych różniczkowym,
zależność pomiędzy sygnałem wejściowym i wyjściowym elementu. Na podstawie opisu
matematycznego wyznacza się graficzną charakterystykę statyczną i dynamiczną układu.
Charakterystyki można również wyznaczyć lub potwierdzić doświadczalnie na
odpowiednio przygotowanych stanowiskach pomiarowych. Tym samym tworzy się
empiryczny model układu lub elementu.Własności statyczne elementu lub układu określane są w stanie ustalonym. Stanustalony występuje wtedy, gdy zarówno wielkość wejściowax , jak i wyjścioway
osiągnęły już określoną wartość i nie ulegają zmianie w czasiex=const , y=const .Charakterystyka statyczna opisuje zależność pomiędzy sygnałem wejściowymx
i
wyjściowymy w stanie ustalonym. Wyznacza się ją analitycznie lub doświadczalnie.
Metoda analityczna polega na graficznym przedstawieniu zależności pomiędzy sygnałem
wejściowym i wyjściowym w oparciu o opisującą model układu zależność matematyczną.
W metodzie doświadczalnej na wejście rzeczywistego układu podaje się określoną,
niezmienną wartość sygnałux
i poprzez pomiar wyznacza się wartość sygnału na
1
wyjściuy
. Następnie podaje się wartośćx
i wyznaczay
itd. Po określeniu
1
2
2odpowiedniej ilości par
x , y zaznacza się je w układzie współrzędnych i dokonuje
aproksymacji, otrzymując charakterystykę. Porównując charakterystyki uzyskane tymi
dwoma metodami, można ocenić jakość opisu układu za pomocą modelu. Im lepszy
model, tym mniej różnią się te charakterystyki. W układzie statycznym ustalona wielkość
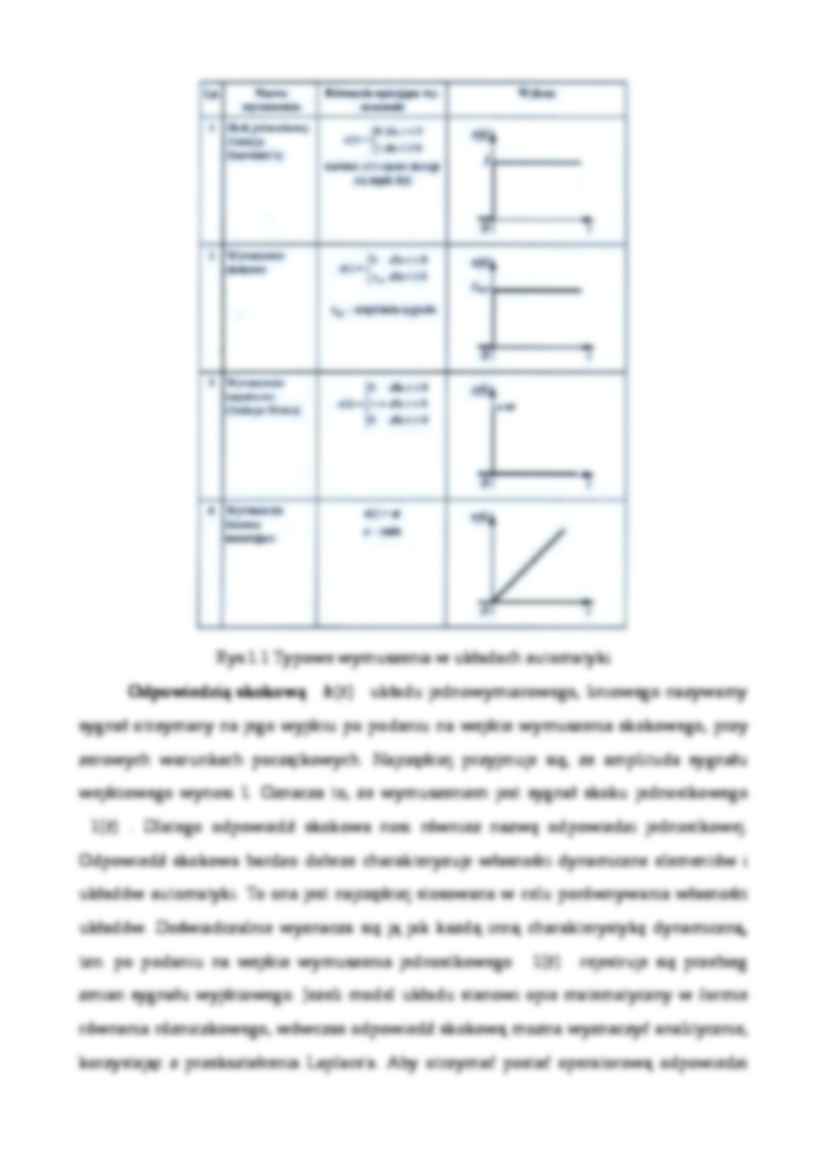
wyjściowa zależy tylko od bieżącej wartości wejściowej.Własności dynamiczne elementu lub układu automatyki określa się analitycznie za
pomocą równań różniczkowych, ich rozwiązania i interpretacji geometrycznej. Stosuje się
głównie opis za pomocą transmitancji operatorowych (1,1), które są funkcjami zmiennej
zespolonej s=a jb , gdzie j= −1 :G s= Y s (1.1),X s
gdzieY
(…)
… do członu idealnego dodatkowo inercję (bezwładności) i jest opisane wzorem:
T- stała czasowa;
k- współczynnik wzmocnienia.
Postać operatorowa członu różniczkującego rzeczywistego ma postać :
Jego odpowiedź na skok jednostkowy przedstawiona jest poniżej:
Przykłady członów różniczkujących rzeczywistych: układy elektryczne RLC,
sprężyna, prądnice i silniki, transformatory, tłumik olejowy czy gazowo-olejowy…
… równaniem różniczkowym drugiego rzędu:
gdzie:
T- stała czasowa;
k- współczynnik wzmocnienia;
ζ- współczynnik tłumienia.
Transmitacja operatorowa członu oscylacyjnego dana jest równaniem:
G(s)=T2*s2+2*ζ*T*s+1
Oscylacje występują najczęściej w układach , w których zachodzi przemiana energii jednego rodzaju w drugi. W członie tym przy wymuszeniu jednostkowym bardzo ważny jest współczynnik tłumienia…
... zobacz całą notatkę

Komentarze użytkowników (0)